mirror of
https://github.com/huggingface/lerobot.git
synced 2026-07-07 18:11:50 +00:00
[pre-commit.ci] auto fixes from pre-commit.com hooks
for more information, see https://pre-commit.ci
This commit is contained in:
+27
-22
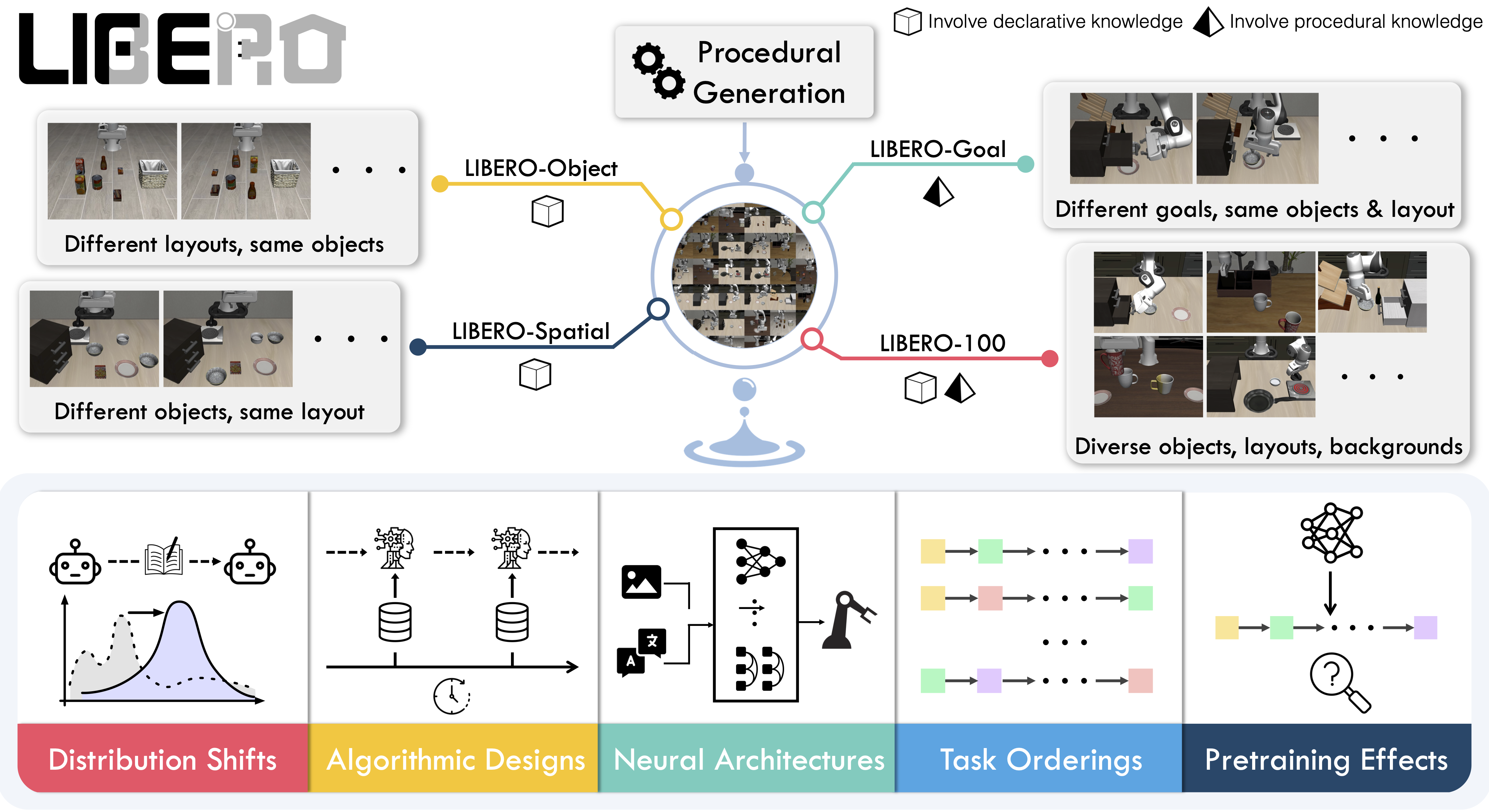
@@ -15,7 +15,7 @@ LIBERO includes **five task suites**:
|
||||
Together, these suites cover **130 tasks**, ranging from simple object manipulations to complex multi-step scenarios. LIBERO is meant to grow over time, and to serve as a shared benchmark where the community can test and improve lifelong learning algorithms.
|
||||
|
||||
|
||||
*Figure 1: An overview of the LIBERO benchmark.*
|
||||
_Figure 1: An overview of the LIBERO benchmark._
|
||||
|
||||
## Evaluating with LIBERO
|
||||
|
||||
@@ -23,15 +23,16 @@ At **LeRobot**, we ported [LIBERO](https://github.com/Lifelong-Robot-Learning/LI
|
||||
|
||||
LIBERO is now part of our **multi-eval supported simulation**, allowing you to benchmark your policies either on a **single suite of tasks** or across **multiple suites at once** with just a single flag.
|
||||
|
||||
To install LIBERO, first follow the [LeRobot Installation Guide](https://huggingface.co/docs/lerobot/installation).
|
||||
To install LIBERO, first follow the [LeRobot Installation Guide](https://huggingface.co/docs/lerobot/installation).
|
||||
Once LeRobot is installed, there are two options:
|
||||
|
||||
1. **Install via pip** (recommended):
|
||||
1. **Install via pip** (recommended):
|
||||
|
||||
```bash
|
||||
pip install "lerobot[libero,smolvla]"
|
||||
```
|
||||
|
||||
2. **Install from source**:
|
||||
2. **Install from source**:
|
||||
```bash
|
||||
git clone https://github.com/huggingface/lerobot.git
|
||||
cd lerobot
|
||||
@@ -85,9 +86,10 @@ When using LIBERO through LeRobot, policies interact with the environment via **
|
||||
- `observation.images.image2` – wrist camera view (`robot0_eye_in_hand_image`).
|
||||
|
||||
⚠️ **Note:** LeRobot enforces the `.images.*` prefix for any visual features. Make sure your dataset metadata keys match this convention when evaluating.
|
||||
|
||||
## Input Features and Metadata Alignment
|
||||
|
||||
To train or evaluate a policy, you use `make_policy`, which builds a feature-naming dictionary for the observations the policy expects.
|
||||
To train or evaluate a policy, you use `make_policy`, which builds a feature-naming dictionary for the observations the policy expects.
|
||||
This mapping can come from:
|
||||
- Dataset metadata
|
||||
- The evaluation environment
|
||||
@@ -96,32 +98,33 @@ When using LIBERO through LeRobot, policies interact with the environment via **
|
||||
### Common Issues
|
||||
|
||||
A common problem is when the keys in the dataset, environment, and policy config do not match. For example:
|
||||
- `wrist_image` vs `observation.images.image2`
|
||||
- `observation.image2` (as in SmolVLA) vs the `.images.*` prefix convention
|
||||
- `wrist_image` vs `observation.images.image2`
|
||||
- `observation.image2` (as in SmolVLA) vs the `.images.*` prefix convention
|
||||
|
||||
Such mismatches will cause `KeyError`s. This may be due to assumptions in `make_policy` or missing error handling.
|
||||
|
||||
---
|
||||
***
|
||||
|
||||
### How to Check Expected Features
|
||||
|
||||
- Open your policy config (`config.json`), e.g. [example here](https://huggingface.co/jadechoghari/smolvla-libero/blob/main/config.json).
|
||||
- Open your policy config (`config.json`), e.g. [example here](https://huggingface.co/jadechoghari/smolvla-libero/blob/main/config.json).
|
||||
- Or add a breakpoint in `train.py` and inspect:
|
||||
```python
|
||||
print(policy.config.input_features)
|
||||
To ensure you can just check what your policy expects as `input_features`:
|
||||
|
||||
- Open your policy config (`config.json`), e.g. [example here](https://huggingface.co/jadechoghari/smolvla-libero/blob/main/config.json).
|
||||
````python
|
||||
print(policy.config.input_features)
|
||||
To ensure you can just check what your policy expects as `input_features`:
|
||||
|
||||
- Open your policy config (`config.json`), e.g. [example here](https://huggingface.co/jadechoghari/smolvla-libero/blob/main/config.json).
|
||||
- Or add a breakpoint in `train.py` and inspect:
|
||||
```python
|
||||
print(policy.config.input_features)
|
||||
Fixing KeyErrors (Preprocessing Example)
|
||||
Fixing KeyErrors (Preprocessing Example)
|
||||
````
|
||||
|
||||
## Fixing KeyErrors (Preprocessing Example)
|
||||
|
||||
If your dataset columns do not follow the expected naming, you can rename them in-place before training:
|
||||
|
||||
```python
|
||||
````python
|
||||
import pyarrow.parquet as pq
|
||||
import shutil
|
||||
|
||||
@@ -162,12 +165,12 @@ The environment expects:
|
||||
- `observation.images.image2` → wrist camera (`robot0_eye_in_hand_image`)
|
||||
|
||||
⚠️ Cleaning the dataset upfront is **cleaner and more efficient** than remapping keys inside the code. We plan to provide a script to easily preprocess such data.
|
||||
To avoid potential mismatches and `KeyError`s, we provide a **preprocessed LIBERO dataset** that is fully compatible with the current LeRobot codebase and requires no additional manipulations.
|
||||
To avoid potential mismatches and `KeyError`s, we provide a **preprocessed LIBERO dataset** that is fully compatible with the current LeRobot codebase and requires no additional manipulations.
|
||||
|
||||
- 🔗 [Preprocessed LIBERO dataset (Hugging Face LeRobot org)](https://huggingface.co/datasets/HuggingFaceVLA/libero)
|
||||
- 🔗 [Original LIBERO dataset (physical-intelligence)](https://huggingface.co/datasets/physical-intelligence/libero)
|
||||
- 🔗 [Preprocessed LIBERO dataset (Hugging Face LeRobot org)](https://huggingface.co/datasets/HuggingFaceVLA/libero)
|
||||
- 🔗 [Original LIBERO dataset (physical-intelligence)](https://huggingface.co/datasets/physical-intelligence/libero)
|
||||
|
||||
The preprocessed dataset follows LeRobot naming conventions (e.g., `.images.*` prefix for visual features) and aligns with policy configs out-of-the-box.
|
||||
The preprocessed dataset follows LeRobot naming conventions (e.g., `.images.*` prefix for visual features) and aligns with policy configs out-of-the-box.
|
||||
The original dataset is acknowledged here as the primary source.
|
||||
---
|
||||
|
||||
@@ -187,7 +190,7 @@ python src/lerobot/scripts/train.py \
|
||||
--eval.batch_size=1 \
|
||||
--eval.n_episodes=1 \
|
||||
--eval_freq=1000 \
|
||||
```
|
||||
````
|
||||
|
||||
---
|
||||
|
||||
@@ -209,15 +212,17 @@ UserWarning: resource_tracker: There appear to be 1 leaked semaphore objects to
|
||||
|
||||
This happens because Colab’s rendering contexts are **not thread-safe**, and `ThreadPoolExecutor(max_workers=num_workers)` can trigger segfaults or leaked semaphore warnings.
|
||||
|
||||
**Colab Note:**
|
||||
**Colab Note:**
|
||||
Parallel evaluation is not supported in Colab. To avoid these issues, run sequentially or disable multitask evaluation:
|
||||
|
||||
Run sequentially:
|
||||
|
||||
```bash
|
||||
--env.max_parallel_tasks=1
|
||||
```
|
||||
|
||||
Or disable multitask evaluation:
|
||||
|
||||
```bash
|
||||
--env.multitask_eval=False
|
||||
```
|
||||
|
||||
Reference in New Issue
Block a user