mirror of
https://github.com/huggingface/lerobot.git
synced 2026-07-23 09:46:00 +00:00
add docs for eval
This commit is contained in:
@@ -0,0 +1,79 @@
|
|||||||
|
# LIBERO
|
||||||
|
|
||||||
|
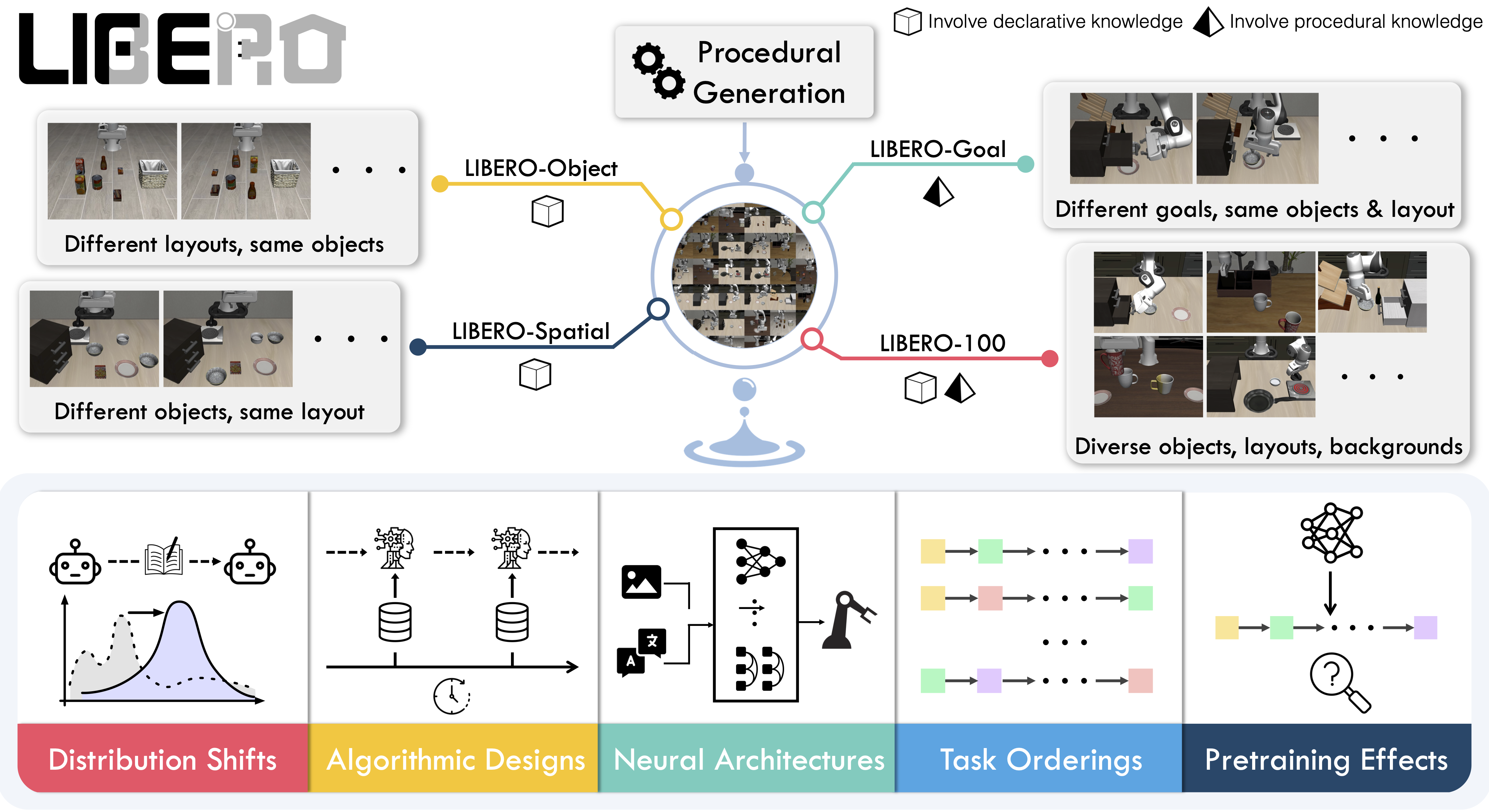
**LIBERO** is a benchmark designed to study **lifelong robot learning**. The idea is that robots won’t just be pretrained once in a factory, they’ll need to keep learning and adapting with their human users over time. This ongoing adaptation is called **lifelong learning in decision making (LLDM)**, and it’s a key step toward building robots that become truly personalized helpers.
|
||||||
|
|
||||||
|
To make progress on this challenge, LIBERO provides a set of standardized tasks that focus on **knowledge transfer**: how well a robot can apply what it has already learned to new situations. By evaluating on LIBERO, different algorithms can be compared fairly and researchers can build on each other’s work.
|
||||||
|
|
||||||
|
LIBERO includes **five task suites**:
|
||||||
|
|
||||||
|
- **LIBERO-Spatial (`libero_spatial`)** – tasks that require reasoning about spatial relations.
|
||||||
|
- **LIBERO-Object (`libero_object`)** – tasks centered on manipulating different objects.
|
||||||
|
- **LIBERO-Goal (`libero_goal`)** – goal-conditioned tasks where the robot must adapt to changing targets.
|
||||||
|
- **LIBERO-90 (`libero_90`)** – 90 short-horizon tasks from the LIBERO-100 collection.
|
||||||
|
- **LIBERO-Long (`libero_10`)** – 10 long-horizon tasks from the LIBERO-100 collection.
|
||||||
|
|
||||||
|
Together, these suites cover **130 tasks**, ranging from simple object manipulations to complex multi-step scenarios. LIBERO is meant to grow over time, and to serve as a shared benchmark where the community can test and improve lifelong learning algorithms.
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
## Evaluating with LIBERO
|
||||||
|
|
||||||
|
At **LeRobot**, we ported [LIBERO](https://github.com/Lifelong-Robot-Learning/LIBERO?utm_source=chatgpt.com) into our framework and used it mainly to **evaluate SmolVLA**, our lightweight Vision-Language-Action model.
|
||||||
|
|
||||||
|
LIBERO is now part of our **multi-eval supported simulation**, meaning you can benchmark your policies either on a **single suite of tasks** or across **multiple suites at once** with just a flag.
|
||||||
|
|
||||||
|
To Install LIBERO, after following LeRobot official instructions, just do:
|
||||||
|
`pip install -e ".[libero]"`
|
||||||
|
|
||||||
|
### Single-suite evaluation
|
||||||
|
|
||||||
|
Evaluate a policy on one LIBERO suite:
|
||||||
|
|
||||||
|
```bash
|
||||||
|
python src/lerobot/scripts/eval.py \
|
||||||
|
--policy.path="your-policy-id" \
|
||||||
|
--env.type=libero \
|
||||||
|
--env.task=libero_object \
|
||||||
|
--env.multitask_eval=False \
|
||||||
|
--eval.batch_size=2 \
|
||||||
|
--eval.n_episodes=3
|
||||||
|
```
|
||||||
|
|
||||||
|
- `-env.task` picks the suite (`libero_object`, `libero_spatial`, etc.).
|
||||||
|
- `-eval.batch_size` controls how many environments run in parallel.
|
||||||
|
- `-eval.n_episodes` sets how many episodes to run in total.
|
||||||
|
|
||||||
|
---
|
||||||
|
|
||||||
|
### Multi-suite evaluation
|
||||||
|
|
||||||
|
Benchmark a policy across multiple suites at once:
|
||||||
|
|
||||||
|
```bash
|
||||||
|
python src/lerobot/scripts/eval.py \
|
||||||
|
--policy.path="your-policy-id" \
|
||||||
|
--env.type=libero \
|
||||||
|
--env.task=libero_object,libero_spatial \
|
||||||
|
--env.multitask_eval=True \
|
||||||
|
--eval.batch_size=1 \
|
||||||
|
--eval.n_episodes=2
|
||||||
|
```
|
||||||
|
|
||||||
|
- Pass a comma-separated list to `-env.task` for multi-suite evaluation.
|
||||||
|
- Set `-env.multitask_eval=True` to enable evaluation across all tasks in those suites.
|
||||||
|
|
||||||
|
### Policy inputs and outputs
|
||||||
|
|
||||||
|
When using LIBERO through LeRobot, policies interact with the environment via **observations** and **actions**:
|
||||||
|
|
||||||
|
- **Observations**
|
||||||
|
- `observation.state` – proprioceptive features (agent state).
|
||||||
|
- `observation.images.image` – main camera view (`agentview_image`).
|
||||||
|
- `observation.images.image2` – wrist camera view (`robot0_eye_in_hand_image`).
|
||||||
|
|
||||||
|
⚠️ **Note:** LeRobot enforces the `.images.*` prefix for any visual features. Make sure your dataset metadata keys match this convention when evaluating.
|
||||||
|
|
||||||
|
- **Actions**
|
||||||
|
- Continuous control values in a `Box(-1, 1, shape=(7,))` space.
|
||||||
|
|
||||||
|
We also provide a notebook for quick testing:
|
||||||
@@ -148,9 +148,9 @@ def get_libero_dummy_action():
|
|||||||
return [0, 0, 0, 0, 0, 0, -1]
|
return [0, 0, 0, 0, 0, 0, -1]
|
||||||
|
|
||||||
|
|
||||||
ACTION_DIM = 8
|
|
||||||
|
|
||||||
|
|
||||||
|
OBS_STATE_DIM = 8
|
||||||
|
ACTION_DIM = 7
|
||||||
class LiberoEnv(gym.Env):
|
class LiberoEnv(gym.Env):
|
||||||
metadata = {"render_modes": ["rgb_array"], "render_fps": 80}
|
metadata = {"render_modes": ["rgb_array"], "render_fps": 80}
|
||||||
|
|
||||||
@@ -234,13 +234,13 @@ class LiberoEnv(gym.Env):
|
|||||||
"agent_pos": spaces.Box(
|
"agent_pos": spaces.Box(
|
||||||
low=-1000.0,
|
low=-1000.0,
|
||||||
high=1000.0,
|
high=1000.0,
|
||||||
shape=(ACTION_DIM,),
|
shape=(OBS_STATE_DIM,),
|
||||||
dtype=np.float64,
|
dtype=np.float64,
|
||||||
),
|
),
|
||||||
}
|
}
|
||||||
)
|
)
|
||||||
|
|
||||||
self.action_space = spaces.Box(low=-1, high=1, shape=(7,), dtype=np.float32)
|
self.action_space = spaces.Box(low=-1, high=1, shape=(ACTION_DIM,), dtype=np.float32)
|
||||||
|
|
||||||
def render(self):
|
def render(self):
|
||||||
raw_obs = self._env.env._get_observations()
|
raw_obs = self._env.env._get_observations()
|
||||||
|
|||||||
Reference in New Issue
Block a user