mirror of
https://github.com/huggingface/lerobot.git
synced 2026-05-12 15:19:43 +00:00
Compare commits
27 Commits
| Author | SHA1 | Date | |
|---|---|---|---|
|
|
6eaf6a861a | ||
|
|
cdd6cb606c | ||
|
|
f6cd24be17 | ||
|
|
54c6b8ae52 | ||
|
|
c9787bd98a | ||
|
|
c435d3cebc | ||
|
|
1666097fd3 | ||
|
|
3068ce3569 | ||
|
|
d6a32e9742 | ||
|
|
9d0cf64da6 | ||
|
|
a68424c3c9 | ||
|
|
664c00b594 | ||
|
|
a665a9df83 | ||
|
|
4bad09cd25 | ||
|
|
2538472781 | ||
|
|
f7283193ea | ||
|
|
ce3670a20e | ||
|
|
62d6169d2f | ||
|
|
d65668ff3c | ||
|
|
cc135d3c4a | ||
|
|
5d1837d87e | ||
|
|
1bc38be719 | ||
|
|
78b866116f | ||
|
|
55e752f0c2 | ||
|
|
847e74f628 | ||
|
|
33cad37054 | ||
|
|
f55c6e89f0 |
@@ -25,7 +25,7 @@ body:
|
||||
id: system-info
|
||||
attributes:
|
||||
label: System Info
|
||||
description: If needed, you can share your lerobot configuration with us by running `python -m lerobot.scripts.display_sys_info` and copy-pasting its outputs below
|
||||
description: Please share your LeRobot configuration by running `lerobot-info` (if installed) or `python -m lerobot.scripts.display_sys_info` (if not installed) and pasting the output below.
|
||||
render: Shell
|
||||
placeholder: lerobot version, OS, python version, numpy version, torch version, and lerobot's configuration
|
||||
validations:
|
||||
|
||||
@@ -0,0 +1,68 @@
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
# This workflow handles closing stale issues and PRs.
|
||||
name: Stale
|
||||
on:
|
||||
# Allows running this workflow manually from the Actions tab
|
||||
workflow_dispatch:
|
||||
|
||||
# Runs at 02:00
|
||||
schedule:
|
||||
- cron: "0 2 * * *"
|
||||
|
||||
env:
|
||||
CLOSE_ISSUE_MESSAGE: >
|
||||
This issue was closed because it has been stalled for 14 days with no activity.
|
||||
Feel free to reopen if is still relevant, or to ping a collaborator if you have any questions.
|
||||
CLOSE_PR_MESSAGE: >
|
||||
This PR was closed because it has been stalled for 14 days with no activity.
|
||||
Feel free to reopen if is still relevant, or to ping a collaborator if you have any questions.
|
||||
WARN_ISSUE_MESSAGE: >
|
||||
This issue has been automatically marked as stale because it has not had
|
||||
recent activity (1 year). It will be closed if no further activity occurs.
|
||||
Thank you for your contributions.
|
||||
WARN_PR_MESSAGE: >
|
||||
This PR has been automatically marked as stale because it has not had
|
||||
recent activity (1 year). It will be closed if no further activity occurs.
|
||||
Thank you for your contributions.
|
||||
|
||||
jobs:
|
||||
# This job runs the actions/stale action to close stale issues and PRs.
|
||||
stale:
|
||||
name: Close Stale Issues and PRs
|
||||
runs-on: ubuntu-latest
|
||||
permissions:
|
||||
actions: write
|
||||
contents: write # only for delete-branch option
|
||||
issues: write
|
||||
pull-requests: write
|
||||
steps:
|
||||
- uses: actions/stale@v10
|
||||
with:
|
||||
repo-token: ${{ secrets.GITHUB_TOKEN }}
|
||||
stale-issue-label: stale
|
||||
stale-pr-label: stale
|
||||
exempt-issue-labels: never-stale
|
||||
exempt-pr-labels: never-stale
|
||||
days-before-issue-stale: 180 # TODO(Steven): Will modify this to 90 after initial cleanup
|
||||
days-before-issue-close: 14
|
||||
days-before-pr-stale: 180
|
||||
days-before-pr-close: 14
|
||||
delete-branch: true
|
||||
close-issue-message: ${{ env.CLOSE_ISSUE_MESSAGE }}
|
||||
close-pr-message: ${{ env.CLOSE_PR_MESSAGE }}
|
||||
stale-issue-message: ${{ env.WARN_ISSUE_MESSAGE }}
|
||||
stale-pr-message: ${{ env.WARN_PR_MESSAGE }}
|
||||
operations-per-run: 500
|
||||
@@ -173,3 +173,7 @@ outputs/
|
||||
|
||||
# Dev folders
|
||||
.cache/*
|
||||
*.stl
|
||||
*.urdf
|
||||
*.xml
|
||||
*.part
|
||||
|
||||
@@ -202,7 +202,7 @@ Check out [example 1](https://github.com/huggingface/lerobot/blob/main/examples/
|
||||
You can also locally visualize episodes from a dataset on the hub by executing our script from the command line:
|
||||
|
||||
```bash
|
||||
python -m lerobot.scripts.visualize_dataset \
|
||||
lerobot-dataset-viz \
|
||||
--repo-id lerobot/pusht \
|
||||
--episode-index 0
|
||||
```
|
||||
@@ -210,7 +210,7 @@ python -m lerobot.scripts.visualize_dataset \
|
||||
or from a dataset in a local folder with the `root` option and the `--local-files-only` (in the following case the dataset will be searched for in `./my_local_data_dir/lerobot/pusht`)
|
||||
|
||||
```bash
|
||||
python -m lerobot.scripts.visualize_dataset \
|
||||
lerobot-dataset-viz \
|
||||
--repo-id lerobot/pusht \
|
||||
--root ./my_local_data_dir \
|
||||
--local-files-only 1 \
|
||||
@@ -221,13 +221,13 @@ It will open `rerun.io` and display the camera streams, robot states and actions
|
||||
|
||||
https://github-production-user-asset-6210df.s3.amazonaws.com/4681518/328035972-fd46b787-b532-47e2-bb6f-fd536a55a7ed.mov?X-Amz-Algorithm=AWS4-HMAC-SHA256&X-Amz-Credential=AKIAVCODYLSA53PQK4ZA%2F20240505%2Fus-east-1%2Fs3%2Faws4_request&X-Amz-Date=20240505T172924Z&X-Amz-Expires=300&X-Amz-Signature=d680b26c532eeaf80740f08af3320d22ad0b8a4e4da1bcc4f33142c15b509eda&X-Amz-SignedHeaders=host&actor_id=24889239&key_id=0&repo_id=748713144
|
||||
|
||||
Our script can also visualize datasets stored on a distant server. See `python -m lerobot.scripts.visualize_dataset --help` for more instructions.
|
||||
Our script can also visualize datasets stored on a distant server. See `lerobot-dataset-viz --help` for more instructions.
|
||||
|
||||
### The `LeRobotDataset` format
|
||||
|
||||
A dataset in `LeRobotDataset` format is very simple to use. It can be loaded from a repository on the Hugging Face hub or a local folder simply with e.g. `dataset = LeRobotDataset("lerobot/aloha_static_coffee")` and can be indexed into like any Hugging Face and PyTorch dataset. For instance `dataset[0]` will retrieve a single temporal frame from the dataset containing observation(s) and an action as PyTorch tensors ready to be fed to a model.
|
||||
|
||||
A specificity of `LeRobotDataset` is that, rather than retrieving a single frame by its index, we can retrieve several frames based on their temporal relationship with the indexed frame, by setting `delta_timestamps` to a list of relative times with respect to the indexed frame. For example, with `delta_timestamps = {"observation.image": [-1, -0.5, -0.2, 0]}` one can retrieve, for a given index, 4 frames: 3 "previous" frames 1 second, 0.5 seconds, and 0.2 seconds before the indexed frame, and the indexed frame itself (corresponding to the 0 entry). See example [1_load_lerobot_dataset.py](https://github.com/huggingface/lerobot/blob/main/examples/1_load_lerobot_dataset.py) for more details on `delta_timestamps`.
|
||||
A specificity of `LeRobotDataset` is that, rather than retrieving a single frame by its index, we can retrieve several frames based on their temporal relationship with the indexed frame, by setting `delta_timestamps` to a list of relative times with respect to the indexed frame. For example, with `delta_timestamps = {"observation.image": [-1, -0.5, -0.2, 0]}` one can retrieve, for a given index, 4 frames: 3 "previous" frames 1 second, 0.5 seconds, and 0.2 seconds before the indexed frame, and the indexed frame itself (corresponding to the 0 entry). See example [1_load_lerobot_dataset.py](https://github.com/huggingface/lerobot/blob/main/examples/dataset/load_lerobot_dataset.py) for more details on `delta_timestamps`.
|
||||
|
||||
Under the hood, the `LeRobotDataset` format makes use of several ways to serialize data which can be useful to understand if you plan to work more closely with this format. We tried to make a flexible yet simple dataset format that would cover most type of features and specificities present in reinforcement learning and robotics, in simulation and in real-world, with a focus on cameras and robot states but easily extended to other types of sensory inputs as long as they can be represented by a tensor.
|
||||
|
||||
@@ -246,19 +246,29 @@ dataset attributes:
|
||||
│ ├ timestamp (float32): timestamp in the episode
|
||||
│ ├ next.done (bool): indicates the end of an episode ; True for the last frame in each episode
|
||||
│ └ index (int64): general index in the whole dataset
|
||||
├ episode_data_index: contains 2 tensors with the start and end indices of each episode
|
||||
│ ├ from (1D int64 tensor): first frame index for each episode — shape (num episodes,) starts with 0
|
||||
│ └ to: (1D int64 tensor): last frame index for each episode — shape (num episodes,)
|
||||
├ stats: a dictionary of statistics (max, mean, min, std) for each feature in the dataset, for instance
|
||||
│ ├ observation.images.cam_high: {'max': tensor with same number of dimensions (e.g. `(c, 1, 1)` for images, `(c,)` for states), etc.}
|
||||
│ ...
|
||||
├ info: a dictionary of metadata on the dataset
|
||||
│ ├ codebase_version (str): this is to keep track of the codebase version the dataset was created with
|
||||
│ ├ fps (float): frame per second the dataset is recorded/synchronized to
|
||||
│ ├ video (bool): indicates if frames are encoded in mp4 video files to save space or stored as png files
|
||||
│ └ encoding (dict): if video, this documents the main options that were used with ffmpeg to encode the videos
|
||||
├ videos_dir (Path): where the mp4 videos or png images are stored/accessed
|
||||
└ camera_keys (list of string): the keys to access camera features in the item returned by the dataset (e.g. `["observation.images.cam_high", ...]`)
|
||||
├ meta: a LeRobotDatasetMetadata object containing:
|
||||
│ ├ info: a dictionary of metadata on the dataset
|
||||
│ │ ├ codebase_version (str): this is to keep track of the codebase version the dataset was created with
|
||||
│ │ ├ fps (int): frame per second the dataset is recorded/synchronized to
|
||||
│ │ ├ features (dict): all features contained in the dataset with their shapes and types
|
||||
│ │ ├ total_episodes (int): total number of episodes in the dataset
|
||||
│ │ ├ total_frames (int): total number of frames in the dataset
|
||||
│ │ ├ robot_type (str): robot type used for recording
|
||||
│ │ ├ data_path (str): formattable string for the parquet files
|
||||
│ │ └ video_path (str): formattable string for the video files (if using videos)
|
||||
│ ├ episodes: a DataFrame containing episode metadata with columns:
|
||||
│ │ ├ episode_index (int): index of the episode
|
||||
│ │ ├ tasks (list): list of tasks for this episode
|
||||
│ │ ├ length (int): number of frames in this episode
|
||||
│ │ ├ dataset_from_index (int): start index of this episode in the dataset
|
||||
│ │ └ dataset_to_index (int): end index of this episode in the dataset
|
||||
│ ├ stats: a dictionary of statistics (max, mean, min, std) for each feature in the dataset, for instance
|
||||
│ │ ├ observation.images.front_cam: {'max': tensor with same number of dimensions (e.g. `(c, 1, 1)` for images, `(c,)` for states), etc.}
|
||||
│ │ └ ...
|
||||
│ └ tasks: a DataFrame containing task information with task names as index and task_index as values
|
||||
├ root (Path): local directory where the dataset is stored
|
||||
├ image_transforms (Callable): optional image transformations to apply to visual modalities
|
||||
└ delta_timestamps (dict): optional delta timestamps for temporal queries
|
||||
```
|
||||
|
||||
A `LeRobotDataset` is serialised using several widespread file formats for each of its parts, namely:
|
||||
@@ -269,42 +279,6 @@ A `LeRobotDataset` is serialised using several widespread file formats for each
|
||||
|
||||
Dataset can be uploaded/downloaded from the HuggingFace hub seamlessly. To work on a local dataset, you can specify its location with the `root` argument if it's not in the default `~/.cache/huggingface/lerobot` location.
|
||||
|
||||
### Evaluate a pretrained policy
|
||||
|
||||
Check out [example 2](https://github.com/huggingface/lerobot/blob/main/examples/2_evaluate_pretrained_policy.py) that illustrates how to download a pretrained policy from Hugging Face hub, and run an evaluation on its corresponding environment.
|
||||
|
||||
We also provide a more capable script to parallelize the evaluation over multiple environments during the same rollout. Here is an example with a pretrained model hosted on [lerobot/diffusion_pusht](https://huggingface.co/lerobot/diffusion_pusht):
|
||||
|
||||
```bash
|
||||
lerobot-eval \
|
||||
--policy.path=lerobot/diffusion_pusht \
|
||||
--env.type=pusht \
|
||||
--eval.batch_size=10 \
|
||||
--eval.n_episodes=10 \
|
||||
--policy.use_amp=false \
|
||||
--policy.device=cuda
|
||||
```
|
||||
|
||||
Note: After training your own policy, you can re-evaluate the checkpoints with:
|
||||
|
||||
```bash
|
||||
lerobot-eval --policy.path={OUTPUT_DIR}/checkpoints/last/pretrained_model
|
||||
```
|
||||
|
||||
See `lerobot-eval --help` for more instructions.
|
||||
|
||||
### Train your own policy
|
||||
|
||||
Check out [example 3](https://github.com/huggingface/lerobot/blob/main/examples/3_train_policy.py) that illustrates how to train a model using our core library in python, and [example 4](https://github.com/huggingface/lerobot/blob/main/examples/4_train_policy_with_script.md) that shows how to use our training script from command line.
|
||||
|
||||
To use wandb for logging training and evaluation curves, make sure you've run `wandb login` as a one-time setup step. Then, when running the training command above, enable WandB in the configuration by adding `--wandb.enable=true`.
|
||||
|
||||
A link to the wandb logs for the run will also show up in yellow in your terminal. Here is an example of what they look like in your browser. Please also check [here](https://github.com/huggingface/lerobot/blob/main/examples/4_train_policy_with_script.md#typical-logs-and-metrics) for the explanation of some commonly used metrics in logs.
|
||||
|
||||
\<img src="https://raw.githubusercontent.com/huggingface/lerobot/main/media/wandb.png" alt="WandB logs example"\>
|
||||
|
||||
Note: For efficiency, during training every checkpoint is evaluated on a low number of episodes. You may use `--eval.n_episodes=500` to evaluate on more episodes than the default. Or, after training, you may want to re-evaluate your best checkpoints on more episodes or change the evaluation settings. See `lerobot-eval --help` for more instructions.
|
||||
|
||||
#### Reproduce state-of-the-art (SOTA)
|
||||
|
||||
We provide some pretrained policies on our [hub page](https://huggingface.co/lerobot) that can achieve state-of-the-art performances.
|
||||
@@ -363,3 +337,7 @@ If you want, you can cite this work with:
|
||||
## Star History
|
||||
|
||||
[](https://star-history.com/#huggingface/lerobot&Timeline)
|
||||
|
||||
```
|
||||
|
||||
```
|
||||
|
||||
@@ -0,0 +1,378 @@
|
||||
"""
|
||||
Benchmark memory footprint and inference latency of a policy on arbitrary devices.
|
||||
|
||||
This script loads a pretrained policy directly (similar to the async inference server)
|
||||
and generates dummy input data based on the policy's input_features to perform
|
||||
accurate benchmarking without requiring datasets.
|
||||
"""
|
||||
|
||||
import argparse
|
||||
import os
|
||||
import signal
|
||||
import statistics
|
||||
from contextlib import contextmanager
|
||||
from datetime import datetime
|
||||
from pathlib import Path
|
||||
|
||||
import psutil
|
||||
import torch
|
||||
from tqdm import tqdm
|
||||
|
||||
from lerobot.configs.types import FeatureType
|
||||
from lerobot.policies.factory import get_policy_class
|
||||
from lerobot.policies.pretrained import PreTrainedPolicy
|
||||
|
||||
|
||||
class TimeoutException:
|
||||
pass
|
||||
|
||||
|
||||
@contextmanager
|
||||
def timeout(seconds):
|
||||
def signal_handler(signum, frame):
|
||||
raise TimeoutException(f"Timed out after {seconds} seconds")
|
||||
|
||||
# On Windows, signal is not available, so we can't use this timeout mechanism
|
||||
if not hasattr(signal, "SIGALRM"):
|
||||
yield
|
||||
return
|
||||
|
||||
old_handler = signal.signal(signal.SIGALRM, signal_handler)
|
||||
try:
|
||||
# signal.alarm expects integer seconds
|
||||
# for float seconds, we can use setitimer
|
||||
signal.setitimer(signal.ITIMER_REAL, seconds)
|
||||
yield
|
||||
finally:
|
||||
signal.setitimer(signal.ITIMER_REAL, 0)
|
||||
signal.signal(signal.SIGALRM, old_handler)
|
||||
|
||||
|
||||
def bytes_to_human(n: int) -> str:
|
||||
for unit in ["B", "KB", "MB", "GB", "TB"]:
|
||||
if n < 1024:
|
||||
return f"{n:.2f} {unit}"
|
||||
n /= 1024
|
||||
return f"{n:.2f} PB"
|
||||
|
||||
|
||||
def percentile(values: list[float], p: float) -> float:
|
||||
if not values:
|
||||
return float("nan")
|
||||
k = (len(values) - 1) * (p / 100.0)
|
||||
f = int(k)
|
||||
c = min(f + 1, len(values) - 1)
|
||||
if f == c:
|
||||
return values[f]
|
||||
return values[f] + (values[c] - values[f]) * (k - f)
|
||||
|
||||
|
||||
def generate_dummy_observation(input_features: dict, device: str = "cpu") -> dict:
|
||||
"""Generate dummy observation data based on policy input features."""
|
||||
dummy_obs = {}
|
||||
|
||||
for key, feature in input_features.items():
|
||||
shape = feature.shape
|
||||
|
||||
if feature.type == FeatureType.VISUAL:
|
||||
# Images: random values in [0, 1] range (already normalized)
|
||||
dummy_obs[key] = torch.rand(shape, dtype=torch.float32, device=device)
|
||||
elif feature.type in [FeatureType.STATE, FeatureType.ACTION, FeatureType.ENV]:
|
||||
# State/action/env: random normal distribution
|
||||
dummy_obs[key] = torch.randn(shape, dtype=torch.float32, device=device)
|
||||
else:
|
||||
# Default: random normal for unknown types
|
||||
dummy_obs[key] = torch.randn(shape, dtype=torch.float32, device=device)
|
||||
|
||||
# Add batch dimension
|
||||
for key in dummy_obs:
|
||||
dummy_obs[key] = dummy_obs[key].unsqueeze(0)
|
||||
|
||||
# Add task string for language-conditioned policies
|
||||
dummy_obs["task"] = ""
|
||||
|
||||
return dummy_obs
|
||||
|
||||
|
||||
def main():
|
||||
parser = argparse.ArgumentParser(description="Policy inference benchmark")
|
||||
parser.add_argument(
|
||||
"--policy-id", type=str, required=True, help="Model ID or local path to pretrained policy"
|
||||
)
|
||||
parser.add_argument(
|
||||
"--policy-type", type=str, required=True, help="Type of policy (smolvla, act, diffusion, etc.)"
|
||||
)
|
||||
parser.add_argument(
|
||||
"--device", type=str, default="mps", choices=["cuda", "cpu", "mps"], help="Device to run on"
|
||||
)
|
||||
parser.add_argument("--seed", type=int, default=42, help="Random seed")
|
||||
parser.add_argument(
|
||||
"--num-samples", type=int, default=100, help="Number of inference samples to benchmark"
|
||||
)
|
||||
parser.add_argument("--warmup", type=int, default=10, help="Number of warmup samples (not timed)")
|
||||
parser.add_argument(
|
||||
"--output-dir", type=str, default="outputs/benchmarks", help="Directory to save benchmark results"
|
||||
)
|
||||
parser.add_argument(
|
||||
"--timeout",
|
||||
type=float,
|
||||
default=0.3,
|
||||
help="Timeout for each inference pass in seconds (default: 0.3s = 300ms)",
|
||||
)
|
||||
args = parser.parse_args()
|
||||
|
||||
# Seed & deterministic-ish setup
|
||||
torch.manual_seed(args.seed)
|
||||
if args.device == "cuda":
|
||||
torch.cuda.manual_seed_all(args.seed)
|
||||
torch.backends.cudnn.benchmark = False
|
||||
torch.backends.cudnn.deterministic = False # leave False to avoid perf cliffs
|
||||
|
||||
# Resolve device availability
|
||||
device = args.device.lower()
|
||||
if device == "cuda" and not torch.cuda.is_available():
|
||||
print("[!] CUDA requested but unavailable. Falling back to CPU.")
|
||||
device = "cpu"
|
||||
elif device == "mps" and not (hasattr(torch.backends, "mps") and torch.backends.mps.is_available()):
|
||||
print("[!] MPS requested but unavailable. Falling back to CPU.")
|
||||
device = "cpu"
|
||||
|
||||
use_cuda = device == "cuda"
|
||||
|
||||
# Create output directory and log file
|
||||
output_dir = Path(args.output_dir)
|
||||
output_dir.mkdir(parents=True, exist_ok=True)
|
||||
timestamp = datetime.now().strftime("%Y%m%d_%H%M%S")
|
||||
policy_name = args.policy_id.replace("/", "_").replace("\\", "_")
|
||||
log_file = output_dir / f"benchmark_{args.policy_type}_{policy_name}_{device}_{timestamp}.txt"
|
||||
|
||||
# Load policy directly from pretrained (similar to async inference server)
|
||||
print(f"Loading policy {args.policy_type} from {args.policy_id}...")
|
||||
policy_class = get_policy_class(args.policy_type)
|
||||
policy: PreTrainedPolicy = policy_class.from_pretrained(args.policy_id)
|
||||
policy.eval()
|
||||
policy.to(device)
|
||||
|
||||
print(f"Policy loaded on {device}")
|
||||
print(f"Input features: {list(policy.config.input_features.keys())}")
|
||||
print(f"Output features: {list(policy.config.output_features.keys())}")
|
||||
|
||||
# Generate dummy observation based on policy input features
|
||||
dummy_observation = generate_dummy_observation(policy.config.input_features, device)
|
||||
dummy_observation["task"] = ""
|
||||
|
||||
# Helper to sync for fair timings
|
||||
def _sync(dev_=device):
|
||||
if dev_ == "cuda" and torch.cuda.is_available():
|
||||
torch.cuda.synchronize()
|
||||
elif dev_ == "mps" and hasattr(torch, "mps"):
|
||||
try:
|
||||
torch.mps.synchronize()
|
||||
except AttributeError:
|
||||
pass # MPS sync not available in this PyTorch version
|
||||
|
||||
# Warmup (to stabilize kernels/caches)
|
||||
print("Warming up...")
|
||||
with torch.no_grad():
|
||||
policy.reset()
|
||||
for _ in range(args.warmup):
|
||||
_ = policy.select_action(dummy_observation)
|
||||
_sync()
|
||||
|
||||
# Memory footprint before timing
|
||||
process = psutil.Process(os.getpid())
|
||||
rss_before = process.memory_info().rss
|
||||
if use_cuda:
|
||||
torch.cuda.reset_peak_memory_stats()
|
||||
|
||||
# PyTorch timing with Event objects for more accurate GPU timing
|
||||
print(f"Running benchmark: {args.num_samples} samples...")
|
||||
|
||||
if use_cuda:
|
||||
# Use CUDA Events for precise GPU timing
|
||||
start_events = []
|
||||
end_events = []
|
||||
timeout_count = 0
|
||||
|
||||
with torch.no_grad():
|
||||
for forward in tqdm(range(args.num_samples), desc="Trials"):
|
||||
start_event = torch.cuda.Event(enable_timing=True)
|
||||
end_event = torch.cuda.Event(enable_timing=True)
|
||||
try:
|
||||
with timeout(args.timeout):
|
||||
start_event.record()
|
||||
_ = policy.select_action(dummy_observation)
|
||||
end_event.record()
|
||||
|
||||
start_events.append(start_event)
|
||||
end_events.append(end_event)
|
||||
except TimeoutException:
|
||||
timeout_count += 1
|
||||
# Add placeholder for timeout
|
||||
start_events.append(None)
|
||||
end_events.append(None)
|
||||
print(f"\n[!] Timeout on forward {forward + 1}")
|
||||
continue
|
||||
|
||||
# Synchronize and collect timing results
|
||||
torch.cuda.synchronize()
|
||||
per_forward_ms = []
|
||||
for start_event, end_event in zip(start_events, end_events, strict=True):
|
||||
if start_event is None:
|
||||
per_forward_ms.append(args.timeout * 1000)
|
||||
else:
|
||||
per_forward_ms.append(start_event.elapsed_time(end_event))
|
||||
|
||||
if timeout_count > 0:
|
||||
print(f"[!] {timeout_count} inference passes timed out (>{args.timeout * 1000:.1f}ms)")
|
||||
|
||||
else:
|
||||
# Use simple time.perf_counter for CPU/MPS timing with timeout
|
||||
import time
|
||||
|
||||
per_forward_ms = []
|
||||
timeout_count = 0
|
||||
|
||||
with torch.no_grad():
|
||||
for sample in tqdm(range(args.num_samples), desc="Samples"):
|
||||
try:
|
||||
with timeout(args.timeout):
|
||||
start_time = time.perf_counter()
|
||||
_ = policy.select_action(dummy_observation)
|
||||
end_time = time.perf_counter()
|
||||
|
||||
per_forward_ms.append((end_time - start_time) * 1000) # Convert to ms
|
||||
except TimeoutException:
|
||||
timeout_count += 1
|
||||
per_forward_ms.append(args.timeout * 1000)
|
||||
print(f"\n[!] Timeout on sample {sample + 1}")
|
||||
continue
|
||||
|
||||
if timeout_count > 0:
|
||||
print(f"[!] {timeout_count} inference passes timed out (>{args.timeout * 1000:.1f}ms)")
|
||||
|
||||
# Memory footprint after timing
|
||||
rss_after = process.memory_info().rss
|
||||
rss_delta = rss_after - rss_before
|
||||
cuda_peak = torch.cuda.max_memory_allocated() if use_cuda else 0
|
||||
|
||||
# Sort timing results for percentile calculations
|
||||
per_forward_ms_sorted = sorted(per_forward_ms)
|
||||
|
||||
mean_ms = statistics.fmean(per_forward_ms) if per_forward_ms else float("nan")
|
||||
std_ms = statistics.pstdev(per_forward_ms) if len(per_forward_ms) > 1 else 0.0
|
||||
min_ms = per_forward_ms_sorted[0] if per_forward_ms_sorted else float("nan")
|
||||
max_ms = per_forward_ms_sorted[-1] if per_forward_ms_sorted else float("nan")
|
||||
p50_ms = percentile(per_forward_ms_sorted, 50)
|
||||
p95_ms = percentile(per_forward_ms_sorted, 95)
|
||||
|
||||
# Model size
|
||||
num_params = sum(p.numel() for p in policy.parameters())
|
||||
|
||||
# Prepare results for logging
|
||||
results = {
|
||||
"timestamp": datetime.now().isoformat(),
|
||||
"policy_type": args.policy_type,
|
||||
"policy_id": args.policy_id,
|
||||
"device": device,
|
||||
"num_trials": args.num_samples,
|
||||
"forwards_per_trial": 1,
|
||||
"warmup": args.warmup,
|
||||
"timeout_ms": args.timeout * 1000,
|
||||
"seed": args.seed,
|
||||
"num_params": num_params,
|
||||
"timeout_count": timeout_count,
|
||||
"latency_mean_ms": mean_ms,
|
||||
"latency_std_ms": std_ms,
|
||||
"latency_min_ms": min_ms,
|
||||
"latency_max_ms": max_ms,
|
||||
"latency_p50_ms": p50_ms,
|
||||
"latency_p95_ms": p95_ms,
|
||||
"cpu_rss_before": rss_before,
|
||||
"cpu_rss_after": rss_after,
|
||||
"cpu_rss_delta": rss_delta,
|
||||
"cuda_peak_alloc": cuda_peak,
|
||||
"input_features": list(policy.config.input_features.keys()),
|
||||
"output_features": list(policy.config.output_features.keys()),
|
||||
}
|
||||
|
||||
# Format and write results to log file
|
||||
log_content = f"""
|
||||
=== LeRobot Policy Inference Benchmark ===
|
||||
Timestamp: {results["timestamp"]}
|
||||
Policy: {results["policy_type"]} ({results["policy_id"]})
|
||||
Device: {results["device"]}
|
||||
Seed: {results["seed"]}
|
||||
|
||||
=== Model Information ===
|
||||
Parameters: {results["num_params"]:,}
|
||||
Input Features: {", ".join(results["input_features"])}
|
||||
Output Features: {", ".join(results["output_features"])}
|
||||
|
||||
=== Benchmark Configuration ===
|
||||
Samples: {results["num_trials"]}
|
||||
Warmup: {results["warmup"]}
|
||||
Total Measurements: {len(per_forward_ms)}
|
||||
Timeout: {results["timeout_ms"]:.1f}ms
|
||||
Timeouts: {results["timeout_count"]} / {results["num_trials"]}
|
||||
|
||||
=== Latency Results (ms) ===
|
||||
Mean: {results["latency_mean_ms"]:.3f}
|
||||
Std Dev: {results["latency_std_ms"]:.3f}
|
||||
Min: {results["latency_min_ms"]:.3f}
|
||||
Max: {results["latency_max_ms"]:.3f}
|
||||
P50: {results["latency_p50_ms"]:.3f}
|
||||
P95: {results["latency_p95_ms"]:.3f}
|
||||
|
||||
=== Memory Footprint ===
|
||||
CPU RSS Before: {bytes_to_human(results["cpu_rss_before"])}
|
||||
CPU RSS After: {bytes_to_human(results["cpu_rss_after"])} (Δ {bytes_to_human(results["cpu_rss_delta"])})
|
||||
"""
|
||||
|
||||
if use_cuda:
|
||||
log_content += f"CUDA Peak: {bytes_to_human(results['cuda_peak_alloc'])} (reset before timing)\n"
|
||||
|
||||
log_content += f"""
|
||||
=== Raw Timing Data (first 20 measurements, ms) ===
|
||||
{", ".join(f"{t:.3f}" for t in per_forward_ms[:20])}
|
||||
{"..." if len(per_forward_ms) > 20 else ""}
|
||||
|
||||
=== Summary Statistics ===
|
||||
Timing Method: {"CUDA Events" if use_cuda else "torch.utils.benchmark.Timer"}
|
||||
Device Available: {torch.cuda.is_available() if device == "cuda" else torch.backends.mps.is_available() if device == "mps" else True}
|
||||
PyTorch Version: {torch.__version__}
|
||||
|
||||
Benchmark completed successfully at {datetime.now().strftime("%Y-%m-%d %H:%M:%S")}
|
||||
"""
|
||||
|
||||
# Write to log file
|
||||
with open(log_file, "w") as f:
|
||||
f.write(log_content)
|
||||
|
||||
# Print to console (shorter version)
|
||||
print("\n=== Inference Benchmark Results ===")
|
||||
print(f"Policy: {args.policy_type} ({args.policy_id})")
|
||||
print(f"Device: {device}")
|
||||
print(f"Samples: {args.num_samples} | Warmup: {args.warmup}")
|
||||
print(f"Model params: {num_params:,}")
|
||||
|
||||
print("\nLatency per forward (ms):")
|
||||
print(f" mean: {mean_ms:.3f} std: {std_ms:.3f}")
|
||||
print(f" min: {min_ms:.3f} max: {max_ms:.3f}")
|
||||
print(f" p50: {p50_ms:.3f} p95: {p95_ms:.3f}")
|
||||
|
||||
print("\nMemory footprint:")
|
||||
print(f" CPU RSS before: {bytes_to_human(rss_before)}")
|
||||
print(f" CPU RSS after : {bytes_to_human(rss_after)} (Δ {bytes_to_human(rss_delta)})")
|
||||
if use_cuda:
|
||||
print(
|
||||
f" CUDA peak allocated: {bytes_to_human(cuda_peak)} "
|
||||
f"(reset by reset_peak_memory_stats before timing)"
|
||||
)
|
||||
|
||||
print(f"\nResults saved to: {log_file}")
|
||||
print("Benchmark completed successfully!")
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
main()
|
||||
@@ -108,7 +108,8 @@ def save_decoded_frames(
|
||||
|
||||
|
||||
def save_first_episode(imgs_dir: Path, dataset: LeRobotDataset) -> None:
|
||||
ep_num_images = dataset.episode_data_index["to"][0].item()
|
||||
episode_index = 0
|
||||
ep_num_images = dataset.meta.episodes["length"][episode_index]
|
||||
if imgs_dir.exists() and len(list(imgs_dir.glob("frame_*.png"))) == ep_num_images:
|
||||
return
|
||||
|
||||
@@ -265,7 +266,8 @@ def benchmark_encoding_decoding(
|
||||
overwrite=True,
|
||||
)
|
||||
|
||||
ep_num_images = dataset.episode_data_index["to"][0].item()
|
||||
episode_index = 0
|
||||
ep_num_images = dataset.meta.episodes["length"][episode_index]
|
||||
width, height = tuple(dataset[0][dataset.meta.camera_keys[0]].shape[-2:])
|
||||
num_pixels = width * height
|
||||
video_size_bytes = video_path.stat().st_size
|
||||
|
||||
@@ -39,6 +39,7 @@ RUN apt-get update && apt-get install -y --no-install-recommends \
|
||||
software-properties-common build-essential git curl \
|
||||
libglib2.0-0 libgl1-mesa-glx libegl1-mesa ffmpeg \
|
||||
libusb-1.0-0-dev speech-dispatcher libgeos-dev portaudio19-dev \
|
||||
cmake pkg-config ninja-build \
|
||||
&& add-apt-repository -y ppa:deadsnakes/ppa \
|
||||
&& apt-get update \
|
||||
&& apt-get install -y --no-install-recommends \
|
||||
|
||||
@@ -31,6 +31,7 @@ ENV DEBIAN_FRONTEND=noninteractive \
|
||||
RUN apt-get update && apt-get install -y --no-install-recommends \
|
||||
build-essential git curl libglib2.0-0 libegl1-mesa-dev ffmpeg \
|
||||
libusb-1.0-0-dev speech-dispatcher libgeos-dev portaudio19-dev \
|
||||
cmake pkg-config ninja-build \
|
||||
&& curl -LsSf https://astral.sh/uv/install.sh | sh \
|
||||
&& mv /root/.local/bin/uv /usr/local/bin/uv \
|
||||
&& useradd --create-home --shell /bin/bash user_lerobot \
|
||||
|
||||
@@ -20,13 +20,30 @@
|
||||
- local: async
|
||||
title: Use Async Inference
|
||||
title: "Tutorials"
|
||||
- sections:
|
||||
- local: lerobot-dataset-v3
|
||||
title: Using LeRobotDataset
|
||||
- local: porting_datasets_v3
|
||||
title: Porting Large Datasets
|
||||
title: "Datasets"
|
||||
- sections:
|
||||
- local: smolvla
|
||||
title: Finetune SmolVLA
|
||||
- local: libero
|
||||
title: Using Libero
|
||||
title: "Policies"
|
||||
|
||||
- sections:
|
||||
- local: introduction_processors
|
||||
title: Introduction to Robot Processors
|
||||
- local: debug_processor_pipeline
|
||||
title: Debug your processor pipeline
|
||||
- local: implement_your_own_processor
|
||||
title: Implement your own processor
|
||||
- local: processors_robots_teleop
|
||||
title: Processors for Robots and Teleoperators
|
||||
title: "Robot Processors"
|
||||
- sections:
|
||||
- local: hope_jr
|
||||
title: Hope Jr
|
||||
- local: so101
|
||||
title: SO-101
|
||||
- local: so100
|
||||
@@ -35,9 +52,15 @@
|
||||
title: Koch v1.1
|
||||
- local: lekiwi
|
||||
title: LeKiwi
|
||||
- local: hope_jr
|
||||
title: Hope Jr
|
||||
- local: reachy2
|
||||
title: Reachy 2
|
||||
title: "Robots"
|
||||
- sections:
|
||||
- local: phone_teleop
|
||||
title: Phone
|
||||
title: "Teleoperators"
|
||||
- sections:
|
||||
- local: notebooks
|
||||
title: Notebooks
|
||||
|
||||
@@ -1,5 +1,61 @@
|
||||
# Backward compatibility
|
||||
|
||||
## Policy Normalization Migration (PR #1452)
|
||||
|
||||
**Breaking Change**: LeRobot policies no longer have built-in normalization layers embedded in their weights. Normalization is now handled by external `PolicyProcessorPipeline` components.
|
||||
|
||||
### What changed?
|
||||
|
||||
| | Before PR #1452 | After PR #1452 |
|
||||
| -------------------------- | ------------------------------------------------ | ------------------------------------------------------------ |
|
||||
| **Normalization Location** | Embedded in model weights (`normalize_inputs.*`) | External `PolicyProcessorPipeline` components |
|
||||
| **Model State Dict** | Contains normalization statistics | **Clean weights only** - no normalization parameters |
|
||||
| **Usage** | `policy(batch)` handles everything | `preprocessor(batch)` → `policy(...)` → `postprocessor(...)` |
|
||||
|
||||
### Impact on existing models
|
||||
|
||||
- Models trained **before** PR #1452 have normalization embedded in their weights
|
||||
- These models need migration to work with the new `PolicyProcessorPipeline` system
|
||||
- The migration extracts normalization statistics and creates separate processor pipelines
|
||||
|
||||
### Migrating old models
|
||||
|
||||
Use the migration script to convert models with embedded normalization:
|
||||
|
||||
```shell
|
||||
python src/lerobot/processor/migrate_policy_normalization.py \
|
||||
--pretrained-path lerobot/act_aloha_sim_transfer_cube_human \
|
||||
--push-to-hub \
|
||||
--branch migrated
|
||||
```
|
||||
|
||||
The script:
|
||||
|
||||
1. **Extracts** normalization statistics from model weights
|
||||
2. **Creates** external preprocessor and postprocessor pipelines
|
||||
3. **Removes** normalization layers from model weights
|
||||
4. **Saves** clean model + processor pipelines
|
||||
5. **Pushes** to Hub with automatic PR creation
|
||||
|
||||
### Using migrated models
|
||||
|
||||
```python
|
||||
# New usage pattern (after migration)
|
||||
from lerobot.policies.factory import make_policy, make_pre_post_processors
|
||||
|
||||
# Load model and processors separately
|
||||
policy = make_policy(config, ds_meta=dataset.meta)
|
||||
preprocessor, postprocessor = make_pre_post_processors(
|
||||
policy_cfg=config,
|
||||
dataset_stats=dataset.meta.stats
|
||||
)
|
||||
|
||||
# Process data through pipeline
|
||||
processed_batch = preprocessor(raw_batch)
|
||||
action = policy.select_action(processed_batch)
|
||||
final_action = postprocessor(action)
|
||||
```
|
||||
|
||||
## Hardware API redesign
|
||||
|
||||
PR [#777](https://github.com/huggingface/lerobot/pull/777) improves the LeRobot calibration but is **not backward-compatible**. Below is a overview of what changed and how you can continue to work with datasets created before this pull request.
|
||||
|
||||
@@ -0,0 +1,299 @@
|
||||
# Debug Your Processor Pipeline
|
||||
|
||||
Processor pipelines can be complex, especially when chaining multiple transformation steps.
|
||||
Unlike simple function calls, pipelines lack natural observability, you can't easily see what happens
|
||||
between each step or where things go wrong.
|
||||
This guide provides debugging tools and techniques specifically designed to address these challenges
|
||||
and help you understand data flow through your pipelines.
|
||||
|
||||
We'll explore three complementary debugging approaches: **hooks** for runtime monitoring, **step-through debugging** for detailed inspection, and **feature validation** for catching structural mismatches. Each serves a different purpose and together they provide complete visibility into your pipeline's behavior.
|
||||
|
||||
## Understanding Hooks
|
||||
|
||||
Hooks are functions that get called at specific points during pipeline execution.
|
||||
They provide a way to inspect, monitor, or modify data without changing your pipeline code.
|
||||
Think of them as "event listeners" for your pipeline.
|
||||
|
||||
### What is a Hook?
|
||||
|
||||
A hook is a callback function that gets automatically invoked at specific moments during pipeline execution.
|
||||
The concept comes from event-driven programming, imagine you could "hook into" the pipeline's execution flow to observe or react to what's happening.
|
||||
|
||||
Think of hooks like inserting checkpoints into your pipeline. Every time the pipeline reaches one of these checkpoints, it pauses briefly to call your hook function, giving you a chance to inspect the current state, log information, and validate data.
|
||||
|
||||
A hook is simply a function that accepts two parameters:
|
||||
|
||||
- `step_idx: int` - The index of the current processing step (0, 1, 2, etc.)
|
||||
- `transition: EnvTransition` - The data transition at that point in the pipeline
|
||||
|
||||
The beauty of hooks is their non-invasive nature: you can add monitoring, validation, or debugging logic without changing a single line of your pipeline code. The pipeline remains clean and focused on its core logic, while hooks handle the cross-cutting concerns like logging, monitoring, and debugging.
|
||||
|
||||
### Before vs After Hooks
|
||||
|
||||
The pipeline supports two types of hooks:
|
||||
|
||||
- **Before hooks** (`register_before_step_hook`) - Called before each step executes
|
||||
- **After hooks** (`register_after_step_hook`) - Called after each step completes
|
||||
|
||||
```python
|
||||
def before_hook(step_idx: int, transition: EnvTransition):
|
||||
"""Called before step processes the transition."""
|
||||
print(f"About to execute step {step_idx}")
|
||||
# Useful for: logging, validation, setup
|
||||
|
||||
def after_hook(step_idx: int, transition: EnvTransition):
|
||||
"""Called after step has processed the transition."""
|
||||
print(f"Completed step {step_idx}")
|
||||
# Useful for: monitoring results, cleanup, debugging
|
||||
|
||||
processor.register_before_step_hook(before_hook)
|
||||
processor.register_after_step_hook(after_hook)
|
||||
```
|
||||
|
||||
### Implementing a NaN Detection Hook
|
||||
|
||||
Here's a practical example of a hook that detects NaN values:
|
||||
|
||||
```python
|
||||
def check_nans(step_idx: int, transition: EnvTransition):
|
||||
"""Check for NaN values in observations."""
|
||||
obs = transition.get(TransitionKey.OBSERVATION)
|
||||
if obs:
|
||||
for key, value in obs.items():
|
||||
if isinstance(value, torch.Tensor) and torch.isnan(value).any():
|
||||
print(f"NaN detected in {key} at step {step_idx}")
|
||||
|
||||
# Register the hook to run after each step
|
||||
processor.register_after_step_hook(check_nans)
|
||||
|
||||
# Process your data - the hook will be called automatically
|
||||
output = processor(input_data)
|
||||
|
||||
# Remove the hook when done debugging
|
||||
processor.unregister_after_step_hook(check_nans)
|
||||
```
|
||||
|
||||
### How Hooks Work Internally
|
||||
|
||||
Understanding the internal mechanism helps you use hooks more effectively. The pipeline maintains two separate lists: one for before-step hooks and another for after-step hooks. When you register a hook, it's simply appended to the appropriate list.
|
||||
|
||||
During execution, the pipeline follows a strict sequence: for each processing step, it first calls all before-hooks in registration order, then executes the actual step transformation, and finally calls all after-hooks in registration order. This creates a predictable, sandwich-like structure around each step.
|
||||
|
||||
The key insight is that hooks don't change the core pipeline logic—they're purely additive. The pipeline's `_forward` method orchestrates this dance between hooks and processing steps, ensuring that your debugging or monitoring code runs at exactly the right moments without interfering with the main data flow.
|
||||
|
||||
Here's a simplified view of how the pipeline executes hooks:
|
||||
|
||||
```python
|
||||
class DataProcessorPipeline:
|
||||
def __init__(self):
|
||||
self.steps = [...]
|
||||
self.before_step_hooks = [] # List of before hooks
|
||||
self.after_step_hooks = [] # List of after hooks
|
||||
|
||||
def _forward(self, transition):
|
||||
"""Internal method that processes the transition through all steps."""
|
||||
for step_idx, processor_step in enumerate(self.steps):
|
||||
# 1. Call all BEFORE hooks
|
||||
for hook in self.before_step_hooks:
|
||||
hook(step_idx, transition)
|
||||
|
||||
# 2. Execute the actual processing step
|
||||
transition = processor_step(transition)
|
||||
|
||||
# 3. Call all AFTER hooks
|
||||
for hook in self.after_step_hooks:
|
||||
hook(step_idx, transition)
|
||||
|
||||
return transition
|
||||
|
||||
def register_before_step_hook(self, hook_fn):
|
||||
self.before_step_hooks.append(hook_fn)
|
||||
|
||||
def register_after_step_hook(self, hook_fn):
|
||||
self.after_step_hooks.append(hook_fn)
|
||||
```
|
||||
|
||||
### Execution Flow
|
||||
|
||||
The execution flow looks like this:
|
||||
|
||||
```
|
||||
Input → Before Hook → Step 0 → After Hook → Before Hook → Step 1 → After Hook → ... → Output
|
||||
```
|
||||
|
||||
For example, with 3 steps and both hook types:
|
||||
|
||||
```python
|
||||
def timing_before(step_idx, transition):
|
||||
print(f"⏱️ Starting step {step_idx}")
|
||||
|
||||
def validation_after(step_idx, transition):
|
||||
print(f"✅ Completed step {step_idx}")
|
||||
|
||||
processor.register_before_step_hook(timing_before)
|
||||
processor.register_after_step_hook(validation_after)
|
||||
|
||||
# This will output:
|
||||
# ⏱️ Starting step 0
|
||||
# ✅ Completed step 0
|
||||
# ⏱️ Starting step 1
|
||||
# ✅ Completed step 1
|
||||
# ⏱️ Starting step 2
|
||||
# ✅ Completed step 2
|
||||
```
|
||||
|
||||
### Multiple Hooks
|
||||
|
||||
You can register multiple hooks of the same type - they execute in the order registered:
|
||||
|
||||
```python
|
||||
def log_shapes(step_idx: int, transition: EnvTransition):
|
||||
obs = transition.get(TransitionKey.OBSERVATION)
|
||||
if obs:
|
||||
print(f"Step {step_idx} observation shapes:")
|
||||
for key, value in obs.items():
|
||||
if isinstance(value, torch.Tensor):
|
||||
print(f" {key}: {value.shape}")
|
||||
|
||||
processor.register_after_step_hook(check_nans) # Executes first
|
||||
processor.register_after_step_hook(log_shapes) # Executes second
|
||||
|
||||
# Both hooks will be called after each step in registration order
|
||||
output = processor(input_data)
|
||||
```
|
||||
|
||||
While hooks are excellent for monitoring specific issues (like NaN detection) or gathering metrics during normal pipeline execution, sometimes you need to dive deeper. When you want to understand exactly what happens at each step or debug complex transformation logic, step-through debugging provides the detailed inspection you need.
|
||||
|
||||
## Step-Through Debugging
|
||||
|
||||
Step-through debugging is like having a slow-motion replay for your pipeline. Instead of watching your data get transformed in one quick blur from input to output, you can pause and examine what happens after each individual step.
|
||||
|
||||
This approach is particularly valuable when you're trying to understand a complex pipeline, debug unexpected behavior, or verify that each transformation is working as expected. Unlike hooks, which are great for automated monitoring, step-through debugging gives you manual, interactive control over the inspection process.
|
||||
|
||||
The `step_through()` method is a generator that yields the transition state after each processing step, allowing you to inspect intermediate results. Think of it as creating a series of snapshots of your data as it flows through the pipeline—each snapshot shows you exactly what your data looks like after one more transformation has been applied.
|
||||
|
||||
### How Step-Through Works
|
||||
|
||||
The `step_through()` method fundamentally changes how the pipeline executes. Instead of running all steps in sequence and only returning the final result, it transforms the pipeline into an iterator that yields intermediate results.
|
||||
|
||||
Here's what happens internally: the method starts by converting your input data into the pipeline's internal transition format, then yields this initial state. Next, it applies the first processing step and yields the result. Then it applies the second step to that result and yields again, and so on. Each `yield` gives you a complete snapshot of the transition at that point.
|
||||
|
||||
This generator pattern is powerful because it's lazy—the pipeline only computes the next step when you ask for it. This means you can stop at any point, inspect the current state thoroughly, and decide whether to continue. You're not forced to run the entire pipeline just to debug one problematic step.
|
||||
|
||||
Instead of running the entire pipeline and only seeing the final result, `step_through()` pauses after each step and gives you the intermediate transition:
|
||||
|
||||
```python
|
||||
# This creates a generator that yields intermediate states
|
||||
for i, intermediate_result in enumerate(processor.step_through(input_data)):
|
||||
print(f"=== After step {i} ===")
|
||||
|
||||
# Inspect the observation at this stage
|
||||
obs = intermediate_result.get(TransitionKey.OBSERVATION)
|
||||
if obs:
|
||||
for key, value in obs.items():
|
||||
if isinstance(value, torch.Tensor):
|
||||
print(f"{key}: shape={value.shape}, dtype={value.dtype}")
|
||||
```
|
||||
|
||||
### Interactive Debugging with Breakpoints
|
||||
|
||||
You can add breakpoints in the step-through loop to interactively debug:
|
||||
|
||||
```python
|
||||
# Step through the pipeline with debugging
|
||||
for i, intermediate in enumerate(processor.step_through(data)):
|
||||
print(f"Step {i}: {processor.steps[i].__class__.__name__}")
|
||||
|
||||
# Set a breakpoint to inspect the current state
|
||||
breakpoint() # Debugger will pause here
|
||||
|
||||
# You can now inspect 'intermediate' in the debugger:
|
||||
# - Check tensor shapes and values
|
||||
# - Verify expected transformations
|
||||
# - Look for unexpected changes
|
||||
```
|
||||
|
||||
During the debugger session, you can:
|
||||
|
||||
- Examine `intermediate[TransitionKey.OBSERVATION]` to see observation data
|
||||
- Check `intermediate[TransitionKey.ACTION]` for action transformations
|
||||
- Inspect any part of the transition to understand what each step does
|
||||
|
||||
Step-through debugging is perfect for understanding the _data_ transformations, but what about the _structure_ of that data? While hooks and step-through help you debug runtime behavior, you also need to ensure your pipeline produces data in the format expected by downstream components. This is where feature contract validation comes in.
|
||||
|
||||
## Validating Feature Contracts
|
||||
|
||||
Feature contracts define what data structure your pipeline expects as input and produces as output.
|
||||
Validating these contracts helps catch mismatches early.
|
||||
|
||||
### Understanding Feature Contracts
|
||||
|
||||
Each processor step has a `transform_features()` method that describes how it changes the data structure:
|
||||
|
||||
```python
|
||||
# Get the expected output features from your pipeline
|
||||
initial_features = {
|
||||
PipelineFeatureType.OBSERVATION: {
|
||||
"observation.state": PolicyFeature(type=FeatureType.STATE, shape=(7,)),
|
||||
"observation.image": PolicyFeature(type=FeatureType.IMAGE, shape=(3, 224, 224))
|
||||
},
|
||||
PipelineFeatureType.ACTION: {
|
||||
"action": PolicyFeature(type=FeatureType.ACTION, shape=(4,))
|
||||
}
|
||||
}
|
||||
|
||||
# Check what your pipeline will output
|
||||
output_features = processor.transform_features(initial_features)
|
||||
|
||||
print("Input features:")
|
||||
for feature_type, features in initial_features.items():
|
||||
print(f" {feature_type}:")
|
||||
for key, feature in features.items():
|
||||
print(f" {key}: {feature.type.value}, shape={feature.shape}")
|
||||
|
||||
print("\nOutput features:")
|
||||
for feature_type, features in output_features.items():
|
||||
print(f" {feature_type}:")
|
||||
for key, feature in features.items():
|
||||
print(f" {key}: {feature.type.value}, shape={feature.shape}")
|
||||
```
|
||||
|
||||
### Verifying Expected Features
|
||||
|
||||
Check that your pipeline produces the features you expect:
|
||||
|
||||
```python
|
||||
# Define what features you expect the pipeline to produce
|
||||
expected_keys = ["observation.state", "observation.image", "action"]
|
||||
|
||||
print("Validating feature contract...")
|
||||
for expected_key in expected_keys:
|
||||
found = False
|
||||
for feature_type, features in output_features.items():
|
||||
if expected_key in features:
|
||||
feature = features[expected_key]
|
||||
print(f"✅ {expected_key}: {feature.type.value}, shape={feature.shape}")
|
||||
found = True
|
||||
break
|
||||
|
||||
if not found:
|
||||
print(f"❌ Missing expected feature: {expected_key}")
|
||||
```
|
||||
|
||||
This validation helps ensure your pipeline will work correctly with downstream components that expect specific data structures.
|
||||
|
||||
## Summary
|
||||
|
||||
Now that you understand the three debugging approaches, you can tackle any pipeline issue systematically:
|
||||
|
||||
1. **Hooks** - For runtime monitoring and validation without modifying pipeline code
|
||||
2. **Step-through** - For inspecting intermediate states and understanding transformations
|
||||
3. **Feature validation** - For ensuring data structure contracts are met
|
||||
|
||||
**When to use each approach:**
|
||||
|
||||
- Start with **step-through debugging** when you need to understand what your pipeline does or when something unexpected happens
|
||||
- Add **hooks** for continuous monitoring during development and production to catch issues automatically
|
||||
- Use **feature validation** before deployment to ensure your pipeline works with downstream components
|
||||
|
||||
These three tools work together to give you the complete observability that complex pipelines naturally lack. With hooks watching for issues, step-through helping you understand behavior, and feature validation ensuring compatibility, you'll be able to debug any pipeline confidently and efficiently.
|
||||
+392
-67
@@ -4,7 +4,13 @@ In this tutorial you will go through the full Human-in-the-Loop Sample-Efficient
|
||||
|
||||
HIL-SERL is a sample-efficient reinforcement learning algorithm that combines human demonstrations with online learning and human interventions. The approach starts from a small set of human demonstrations, uses them to train a reward classifier, and then employs an actor-learner architecture where humans can intervene during policy execution to guide exploration and correct unsafe behaviors. In this tutorial, you'll use a gamepad to provide interventions and control the robot during the learning process.
|
||||
|
||||
It combines three key ingredients: 1. **Offline demonstrations & reward classifier:** a handful of human-teleop episodes plus a vision-based success detector give the policy a shaped starting point. 2. **On-robot actor / learner loop with human interventions:** a distributed Soft Actor Critic (SAC) learner updates the policy while an actor explores on the physical robot; the human can jump in at any time to correct dangerous or unproductive behaviour. 3. **Safety & efficiency tools:** joint/end-effector (EE) bounds, crop region of interest (ROI) preprocessing and WandB monitoring keep the data useful and the hardware safe.
|
||||
It combines three key ingredients:
|
||||
|
||||
1. **Offline demonstrations & reward classifier:** a handful of human-teleop episodes plus a vision-based success detector give the policy a shaped starting point.
|
||||
|
||||
2. **On-robot actor / learner loop with human interventions:** a distributed Soft Actor Critic (SAC) learner updates the policy while an actor explores on the physical robot; the human can jump in at any time to correct dangerous or unproductive behaviour.
|
||||
|
||||
3. **Safety & efficiency tools:** joint/end-effector (EE) bounds, crop region of interest (ROI) preprocessing and WandB monitoring keep the data useful and the hardware safe.
|
||||
|
||||
Together these elements let HIL-SERL reach near-perfect task success and faster cycle times than imitation-only baselines.
|
||||
|
||||
@@ -56,30 +62,242 @@ pip install -e ".[hilserl]"
|
||||
|
||||
### Understanding Configuration
|
||||
|
||||
The training process begins with proper configuration for the HILSerl environment. The configuration class of interest is `HILSerlRobotEnvConfig` in `lerobot/envs/configs.py`. Which is defined as:
|
||||
The training process begins with proper configuration for the HILSerl environment. The main configuration class is `GymManipulatorConfig` in `lerobot/rl/gym_manipulator.py`, which contains nested `HILSerlRobotEnvConfig` and `DatasetConfig`. The configuration is organized into focused, nested sub-configs:
|
||||
|
||||
<!-- prettier-ignore-start -->
|
||||
```python
|
||||
class GymManipulatorConfig:
|
||||
env: HILSerlRobotEnvConfig # Environment configuration (nested)
|
||||
dataset: DatasetConfig # Dataset recording/replay configuration (nested)
|
||||
mode: str | None = None # "record", "replay", or None (for training)
|
||||
device: str = "cpu" # Compute device
|
||||
|
||||
class HILSerlRobotEnvConfig(EnvConfig):
|
||||
robot: RobotConfig | None = None # Main robot agent (defined in `lerobot/robots`)
|
||||
teleop: TeleoperatorConfig | None = None # Teleoperator agent, e.g., gamepad or leader arm, (defined in `lerobot/teleoperators`)
|
||||
wrapper: EnvTransformConfig | None = None # Environment wrapper settings; check `lerobot/scripts/server/gym_manipulator.py`
|
||||
fps: int = 10 # Control frequency
|
||||
teleop: TeleoperatorConfig | None = None # Teleoperator agent, e.g., gamepad or leader arm
|
||||
processor: HILSerlProcessorConfig # Processing pipeline configuration (nested)
|
||||
name: str = "real_robot" # Environment name
|
||||
mode: str = None # "record", "replay", or None (for training)
|
||||
repo_id: str | None = None # LeRobot dataset repository ID
|
||||
dataset_root: str | None = None # Local dataset root (optional)
|
||||
task: str = "" # Task identifier
|
||||
num_episodes: int = 10 # Number of episodes for recording
|
||||
episode: int = 0 # episode index for replay
|
||||
device: str = "cuda" # Compute device
|
||||
push_to_hub: bool = True # Whether to push the recorded datasets to Hub
|
||||
pretrained_policy_name_or_path: str | None = None # For policy loading
|
||||
reward_classifier_pretrained_path: str | None = None # For reward model
|
||||
number_of_steps_after_success: int = 0 # For reward classifier, collect more positive examples after a success to train a classifier
|
||||
task: str | None = None # Task identifier
|
||||
fps: int = 10 # Control frequency
|
||||
|
||||
# Nested processor configuration
|
||||
class HILSerlProcessorConfig:
|
||||
control_mode: str = "gamepad" # Control mode
|
||||
observation: ObservationConfig | None = None # Observation processing settings
|
||||
image_preprocessing: ImagePreprocessingConfig | None = None # Image crop/resize settings
|
||||
gripper: GripperConfig | None = None # Gripper control and penalty settings
|
||||
reset: ResetConfig | None = None # Environment reset and timing settings
|
||||
inverse_kinematics: InverseKinematicsConfig | None = None # IK processing settings
|
||||
reward_classifier: RewardClassifierConfig | None = None # Reward classifier settings
|
||||
max_gripper_pos: float | None = 100.0 # Maximum gripper position
|
||||
|
||||
# Sub-configuration classes
|
||||
class ObservationConfig:
|
||||
add_joint_velocity_to_observation: bool = False # Add joint velocities to state
|
||||
add_current_to_observation: bool = False # Add motor currents to state
|
||||
add_ee_pose_to_observation: bool = False # Add end-effector pose to state
|
||||
display_cameras: bool = False # Display camera feeds during execution
|
||||
|
||||
class ImagePreprocessingConfig:
|
||||
crop_params_dict: dict[str, tuple[int, int, int, int]] | None = None # Image cropping parameters
|
||||
resize_size: tuple[int, int] | None = None # Target image size
|
||||
|
||||
class GripperConfig:
|
||||
use_gripper: bool = True # Enable gripper control
|
||||
gripper_penalty: float = 0.0 # Penalty for inappropriate gripper usage
|
||||
gripper_penalty_in_reward: bool = False # Include gripper penalty in reward
|
||||
|
||||
class ResetConfig:
|
||||
fixed_reset_joint_positions: Any | None = None # Joint positions for reset
|
||||
reset_time_s: float = 5.0 # Time to wait during reset
|
||||
control_time_s: float = 20.0 # Maximum episode duration
|
||||
terminate_on_success: bool = True # Whether to terminate episodes on success detection
|
||||
|
||||
class InverseKinematicsConfig:
|
||||
urdf_path: str | None = None # Path to robot URDF file
|
||||
target_frame_name: str | None = None # End-effector frame name
|
||||
end_effector_bounds: dict[str, list[float]] | None = None # EE workspace bounds
|
||||
end_effector_step_sizes: dict[str, float] | None = None # EE step sizes per axis
|
||||
|
||||
class RewardClassifierConfig:
|
||||
pretrained_path: str | None = None # Path to pretrained reward classifier
|
||||
success_threshold: float = 0.5 # Success detection threshold
|
||||
success_reward: float = 1.0 # Reward value for successful episodes
|
||||
|
||||
# Dataset configuration
|
||||
class DatasetConfig:
|
||||
repo_id: str # LeRobot dataset repository ID
|
||||
task: str # Task identifier
|
||||
root: str | None = None # Local dataset root directory
|
||||
num_episodes_to_record: int = 5 # Number of episodes for recording
|
||||
replay_episode: int | None = None # Episode index for replay
|
||||
push_to_hub: bool = False # Whether to push datasets to Hub
|
||||
```
|
||||
<!-- prettier-ignore-end -->
|
||||
|
||||
### Processor Pipeline Architecture
|
||||
|
||||
HIL-SERL uses a modular processor pipeline architecture that processes robot observations and actions through a series of composable steps. The pipeline is divided into two main components:
|
||||
|
||||
#### Environment Processor Pipeline
|
||||
|
||||
The environment processor (`env_processor`) handles incoming observations and environment state:
|
||||
|
||||
1. **VanillaObservationProcessorStep**: Converts raw robot observations into standardized format
|
||||
2. **JointVelocityProcessorStep** (optional): Adds joint velocity information to observations
|
||||
3. **MotorCurrentProcessorStep** (optional): Adds motor current readings to observations
|
||||
4. **ForwardKinematicsJointsToEE** (optional): Computes end-effector pose from joint positions
|
||||
5. **ImageCropResizeProcessorStep** (optional): Crops and resizes camera images
|
||||
6. **TimeLimitProcessorStep** (optional): Enforces episode time limits
|
||||
7. **GripperPenaltyProcessorStep** (optional): Applies penalties for inappropriate gripper usage
|
||||
8. **RewardClassifierProcessorStep** (optional): Automated reward detection using vision models
|
||||
9. **AddBatchDimensionProcessorStep**: Converts data to batch format for neural network processing
|
||||
10. **DeviceProcessorStep**: Moves data to the specified compute device (CPU/GPU)
|
||||
|
||||
#### Action Processor Pipeline
|
||||
|
||||
The action processor (`action_processor`) handles outgoing actions and human interventions:
|
||||
|
||||
1. **AddTeleopActionAsComplimentaryDataStep**: Captures teleoperator actions for logging
|
||||
2. **AddTeleopEventsAsInfoStep**: Records intervention events and episode control signals
|
||||
3. **InterventionActionProcessorStep**: Handles human interventions and episode termination
|
||||
4. **Inverse Kinematics Pipeline** (when enabled):
|
||||
- **MapDeltaActionToRobotActionStep**: Converts delta actions to robot action format
|
||||
- **EEReferenceAndDelta**: Computes end-effector reference and delta movements
|
||||
- **EEBoundsAndSafety**: Enforces workspace safety bounds
|
||||
- **InverseKinematicsEEToJoints**: Converts end-effector actions to joint targets
|
||||
- **GripperVelocityToJoint**: Handles gripper control commands
|
||||
|
||||
#### Configuration Examples
|
||||
|
||||
**Basic Observation Processing**:
|
||||
|
||||
```json
|
||||
{
|
||||
"env": {
|
||||
"processor": {
|
||||
"observation": {
|
||||
"add_joint_velocity_to_observation": true,
|
||||
"add_current_to_observation": false,
|
||||
"display_cameras": false
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
**Image Processing**:
|
||||
|
||||
```json
|
||||
{
|
||||
"env": {
|
||||
"processor": {
|
||||
"image_preprocessing": {
|
||||
"crop_params_dict": {
|
||||
"observation.images.front": [180, 250, 120, 150],
|
||||
"observation.images.side": [180, 207, 180, 200]
|
||||
},
|
||||
"resize_size": [128, 128]
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
**Inverse Kinematics Setup**:
|
||||
|
||||
```json
|
||||
{
|
||||
"env": {
|
||||
"processor": {
|
||||
"inverse_kinematics": {
|
||||
"urdf_path": "path/to/robot.urdf",
|
||||
"target_frame_name": "end_effector",
|
||||
"end_effector_bounds": {
|
||||
"min": [0.16, -0.08, 0.03],
|
||||
"max": [0.24, 0.2, 0.1]
|
||||
},
|
||||
"end_effector_step_sizes": {
|
||||
"x": 0.02,
|
||||
"y": 0.02,
|
||||
"z": 0.02
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
### Advanced Observation Processing
|
||||
|
||||
The HIL-SERL framework supports additional observation processing features that can improve policy learning:
|
||||
|
||||
#### Joint Velocity Processing
|
||||
|
||||
Enable joint velocity estimation to provide the policy with motion information:
|
||||
|
||||
```json
|
||||
{
|
||||
"env": {
|
||||
"processor": {
|
||||
"observation": {
|
||||
"add_joint_velocity_to_observation": true
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
This processor:
|
||||
|
||||
- Estimates joint velocities using finite differences between consecutive joint position readings
|
||||
- Adds velocity information to the observation state vector
|
||||
- Useful for policies that need motion awareness for dynamic tasks
|
||||
|
||||
#### Motor Current Processing
|
||||
|
||||
Monitor motor currents to detect contact forces and load conditions:
|
||||
|
||||
```json
|
||||
{
|
||||
"env": {
|
||||
"processor": {
|
||||
"observation": {
|
||||
"add_current_to_observation": true
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
This processor:
|
||||
|
||||
- Reads motor current values from the robot's control system
|
||||
- Adds current measurements to the observation state vector
|
||||
- Helps detect contact events, object weights, and mechanical resistance
|
||||
- Useful for contact-rich manipulation tasks
|
||||
|
||||
#### Combined Observation Processing
|
||||
|
||||
You can enable multiple observation processing features simultaneously:
|
||||
|
||||
```json
|
||||
{
|
||||
"env": {
|
||||
"processor": {
|
||||
"observation": {
|
||||
"add_joint_velocity_to_observation": true,
|
||||
"add_current_to_observation": true,
|
||||
"add_ee_pose_to_observation": false,
|
||||
"display_cameras": false
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
**Note**: Enabling additional observation features increases the state space dimensionality, which may require adjusting your policy network architecture and potentially collecting more training data.
|
||||
|
||||
### Finding Robot Workspace Bounds
|
||||
|
||||
Before collecting demonstrations, you need to determine the appropriate operational bounds for your robot.
|
||||
@@ -128,24 +346,58 @@ With the bounds defined, you can safely collect demonstrations for training. Tra
|
||||
|
||||
**Setting Up Record Mode**
|
||||
|
||||
Create a configuration file for recording demonstrations (or edit an existing one like [env_config_so100.json](https://huggingface.co/datasets/aractingi/lerobot-example-config-files/blob/main/env_config_so100.json)):
|
||||
Create a configuration file for recording demonstrations (or edit an existing one like [env_config.json](https://huggingface.co/datasets/lerobot/config_examples/resolve/main/rl/env_config.json)):
|
||||
|
||||
1. Set `mode` to `"record"`
|
||||
2. Specify a unique `repo_id` for your dataset (e.g., "username/task_name")
|
||||
3. Set `num_episodes` to the number of demonstrations you want to collect
|
||||
4. Set `crop_params_dict` to `null` initially (we'll determine crops later)
|
||||
5. Configure `robot`, `cameras`, and other hardware settings
|
||||
1. Set `mode` to `"record"` at the root level
|
||||
2. Specify a unique `repo_id` for your dataset in the `dataset` section (e.g., "username/task_name")
|
||||
3. Set `num_episodes_to_record` in the `dataset` section to the number of demonstrations you want to collect
|
||||
4. Set `env.processor.image_preprocessing.crop_params_dict` to `{}` initially (we'll determine crops later)
|
||||
5. Configure `env.robot`, `env.teleop`, and other hardware settings in the `env` section
|
||||
|
||||
Example configuration section:
|
||||
|
||||
```json
|
||||
"mode": "record",
|
||||
"repo_id": "username/pick_lift_cube",
|
||||
"dataset_root": null,
|
||||
"task": "pick_and_lift",
|
||||
"num_episodes": 15,
|
||||
"episode": 0,
|
||||
"push_to_hub": true
|
||||
{
|
||||
"env": {
|
||||
"type": "gym_manipulator",
|
||||
"name": "real_robot",
|
||||
"fps": 10,
|
||||
"processor": {
|
||||
"control_mode": "gamepad",
|
||||
"observation": {
|
||||
"display_cameras": false
|
||||
},
|
||||
"image_preprocessing": {
|
||||
"crop_params_dict": {},
|
||||
"resize_size": [128, 128]
|
||||
},
|
||||
"gripper": {
|
||||
"use_gripper": true,
|
||||
"gripper_penalty": 0.0
|
||||
},
|
||||
"reset": {
|
||||
"reset_time_s": 5.0,
|
||||
"control_time_s": 20.0
|
||||
}
|
||||
},
|
||||
"robot": {
|
||||
// ... robot configuration ...
|
||||
},
|
||||
"teleop": {
|
||||
// ... teleoperator configuration ...
|
||||
}
|
||||
},
|
||||
"dataset": {
|
||||
"repo_id": "username/pick_lift_cube",
|
||||
"root": null,
|
||||
"task": "pick_and_lift",
|
||||
"num_episodes_to_record": 15,
|
||||
"replay_episode": 0,
|
||||
"push_to_hub": true
|
||||
},
|
||||
"mode": "record",
|
||||
"device": "cpu"
|
||||
}
|
||||
```
|
||||
|
||||
### Using a Teleoperation Device
|
||||
@@ -191,10 +443,20 @@ The gamepad provides a very convenient way to control the robot and the episode
|
||||
To setup the gamepad, you need to set the `control_mode` to `"gamepad"` and define the `teleop` section in the configuration file.
|
||||
|
||||
```json
|
||||
{
|
||||
"env": {
|
||||
"teleop": {
|
||||
"type": "gamepad",
|
||||
"use_gripper": true
|
||||
"type": "gamepad",
|
||||
"use_gripper": true
|
||||
},
|
||||
"processor": {
|
||||
"control_mode": "gamepad",
|
||||
"gripper": {
|
||||
"use_gripper": true
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
<p align="center">
|
||||
@@ -216,11 +478,21 @@ The SO101 leader arm has reduced gears that allows it to move and track the foll
|
||||
To setup the SO101 leader, you need to set the `control_mode` to `"leader"` and define the `teleop` section in the configuration file.
|
||||
|
||||
```json
|
||||
{
|
||||
"env": {
|
||||
"teleop": {
|
||||
"type": "so101_leader",
|
||||
"port": "/dev/tty.usbmodem585A0077921", # check your port number
|
||||
"use_degrees": true
|
||||
"type": "so101_leader",
|
||||
"port": "/dev/tty.usbmodem585A0077921",
|
||||
"use_degrees": true
|
||||
},
|
||||
"processor": {
|
||||
"control_mode": "leader",
|
||||
"gripper": {
|
||||
"use_gripper": true
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
In order to annotate the success/failure of the episode, **you will need** to use a keyboard to press `s` for success, `esc` for failure.
|
||||
@@ -246,12 +518,12 @@ During the online training, press `space` to take over the policy and `space` ag
|
||||
Start the recording process, an example of the config file can be found [here](https://huggingface.co/datasets/aractingi/lerobot-example-config-files/blob/main/env_config_so100.json):
|
||||
|
||||
```bash
|
||||
python -m lerobot.scripts.rl.gym_manipulator --config_path src/lerobot/configs/env_config_so100.json
|
||||
python -m lerobot.rl.gym_manipulator --config_path src/lerobot/configs/env_config_so100.json
|
||||
```
|
||||
|
||||
During recording:
|
||||
|
||||
1. The robot will reset to the initial position defined in the configuration file `fixed_reset_joint_positions`
|
||||
1. The robot will reset to the initial position defined in the configuration file `env.processor.reset.fixed_reset_joint_positions`
|
||||
2. Complete the task successfully
|
||||
3. The episode ends with a reward of 1 when you press the "success" button
|
||||
4. If the time limit is reached, or the fail button is pressed, the episode ends with a reward of 0
|
||||
@@ -277,7 +549,7 @@ Note: If you already know the crop parameters, you can skip this step and just s
|
||||
Use the `crop_dataset_roi.py` script to interactively select regions of interest in your camera images:
|
||||
|
||||
```bash
|
||||
python -m lerobot.scripts.rl.crop_dataset_roi --repo-id username/pick_lift_cube
|
||||
python -m lerobot.rl.crop_dataset_roi --repo-id username/pick_lift_cube
|
||||
```
|
||||
|
||||
1. For each camera view, the script will display the first frame
|
||||
@@ -310,11 +582,19 @@ observation.images.front: [180, 250, 120, 150]
|
||||
Add these crop parameters to your training configuration:
|
||||
|
||||
```json
|
||||
"crop_params_dict": {
|
||||
"observation.images.side": [180, 207, 180, 200],
|
||||
"observation.images.front": [180, 250, 120, 150]
|
||||
},
|
||||
"resize_size": [128, 128]
|
||||
{
|
||||
"env": {
|
||||
"processor": {
|
||||
"image_preprocessing": {
|
||||
"crop_params_dict": {
|
||||
"observation.images.side": [180, 207, 180, 200],
|
||||
"observation.images.front": [180, 250, 120, 150]
|
||||
},
|
||||
"resize_size": [128, 128]
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
**Recommended image resolution**
|
||||
@@ -338,31 +618,57 @@ Before training, you need to collect a dataset with labeled examples. The `recor
|
||||
To collect a dataset, you need to modify some parameters in the environment configuration based on HILSerlRobotEnvConfig.
|
||||
|
||||
```bash
|
||||
python -m lerobot.scripts.rl.gym_manipulator --config_path src/lerobot/configs/reward_classifier_train_config.json
|
||||
python -m lerobot.rl.gym_manipulator --config_path src/lerobot/configs/reward_classifier_train_config.json
|
||||
```
|
||||
|
||||
**Key Parameters for Data Collection**
|
||||
|
||||
- **mode**: set it to `"record"` to collect a dataset
|
||||
- **repo_id**: `"hf_username/dataset_name"`, name of the dataset and repo on the hub
|
||||
- **num_episodes**: Number of episodes to record
|
||||
- **number_of_steps_after_success**: Number of additional frames to record after a success (reward=1) is detected
|
||||
- **fps**: Number of frames per second to record
|
||||
- **push_to_hub**: Whether to push the dataset to the hub
|
||||
- **mode**: set it to `"record"` to collect a dataset (at root level)
|
||||
- **dataset.repo_id**: `"hf_username/dataset_name"`, name of the dataset and repo on the hub
|
||||
- **dataset.num_episodes_to_record**: Number of episodes to record
|
||||
- **env.processor.reset.terminate_on_success**: Whether to automatically terminate episodes when success is detected (default: `true`)
|
||||
- **env.fps**: Number of frames per second to record
|
||||
- **dataset.push_to_hub**: Whether to push the dataset to the hub
|
||||
|
||||
The `number_of_steps_after_success` parameter is crucial as it allows you to collect more positive examples. When a success is detected, the system will continue recording for the specified number of steps while maintaining the reward=1 label. Otherwise, there won't be enough states in the dataset labeled to 1 to train a good classifier.
|
||||
The `env.processor.reset.terminate_on_success` parameter allows you to control episode termination behavior. When set to `false`, episodes will continue even after success is detected, allowing you to collect more positive examples with the reward=1 label. This is crucial for training reward classifiers as it provides more success state examples in your dataset. When set to `true` (default), episodes terminate immediately upon success detection.
|
||||
|
||||
**Important**: For reward classifier training, set `terminate_on_success: false` to collect sufficient positive examples. For regular HIL-SERL training, keep it as `true` to enable automatic episode termination when the task is completed successfully.
|
||||
|
||||
Example configuration section for data collection:
|
||||
|
||||
```json
|
||||
{
|
||||
"env": {
|
||||
"type": "gym_manipulator",
|
||||
"name": "real_robot",
|
||||
"fps": 10,
|
||||
"processor": {
|
||||
"reset": {
|
||||
"reset_time_s": 5.0,
|
||||
"control_time_s": 20.0,
|
||||
"terminate_on_success": false
|
||||
},
|
||||
"gripper": {
|
||||
"use_gripper": true
|
||||
}
|
||||
},
|
||||
"robot": {
|
||||
// ... robot configuration ...
|
||||
},
|
||||
"teleop": {
|
||||
// ... teleoperator configuration ...
|
||||
}
|
||||
},
|
||||
"dataset": {
|
||||
"repo_id": "hf_username/dataset_name",
|
||||
"dataset_root": "data/your_dataset",
|
||||
"task": "reward_classifier_task",
|
||||
"num_episodes_to_record": 20,
|
||||
"replay_episode": null,
|
||||
"push_to_hub": true
|
||||
},
|
||||
"mode": "record",
|
||||
"repo_id": "hf_username/dataset_name",
|
||||
"dataset_root": "data/your_dataset",
|
||||
"num_episodes": 20,
|
||||
"push_to_hub": true,
|
||||
"fps": 10,
|
||||
"number_of_steps_after_success": 15
|
||||
"device": "cpu"
|
||||
}
|
||||
```
|
||||
|
||||
@@ -421,9 +727,17 @@ To use your trained reward classifier, configure the `HILSerlRobotEnvConfig` to
|
||||
|
||||
<!-- prettier-ignore-start -->
|
||||
```python
|
||||
env_config = HILSerlRobotEnvConfig(
|
||||
reward_classifier_pretrained_path="path_to_your_pretrained_trained_model",
|
||||
# Other environment parameters
|
||||
config = GymManipulatorConfig(
|
||||
env=HILSerlRobotEnvConfig(
|
||||
processor=HILSerlProcessorConfig(
|
||||
reward_classifier=RewardClassifierConfig(
|
||||
pretrained_path="path_to_your_pretrained_trained_model"
|
||||
)
|
||||
),
|
||||
# Other environment parameters
|
||||
),
|
||||
dataset=DatasetConfig(...),
|
||||
mode=None # For training
|
||||
)
|
||||
```
|
||||
<!-- prettier-ignore-end -->
|
||||
@@ -432,14 +746,25 @@ or set the argument in the json config file.
|
||||
|
||||
```json
|
||||
{
|
||||
"reward_classifier_pretrained_path": "path_to_your_pretrained_model"
|
||||
"env": {
|
||||
"processor": {
|
||||
"reward_classifier": {
|
||||
"pretrained_path": "path_to_your_pretrained_model",
|
||||
"success_threshold": 0.7,
|
||||
"success_reward": 1.0
|
||||
},
|
||||
"reset": {
|
||||
"terminate_on_success": true
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
Run `gym_manipulator.py` to test the model.
|
||||
|
||||
```bash
|
||||
python -m lerobot.scripts.rl.gym_manipulator --config_path path/to/env_config.json
|
||||
python -m lerobot.rl.gym_manipulator --config_path path/to/env_config.json
|
||||
```
|
||||
|
||||
The reward classifier will automatically provide rewards based on the visual input from the robot's cameras.
|
||||
@@ -447,12 +772,12 @@ The reward classifier will automatically provide rewards based on the visual inp
|
||||
**Example Workflow for training the reward classifier**
|
||||
|
||||
1. **Create the configuration files**:
|
||||
Create the necessary json configuration files for the reward classifier and the environment. Check the examples [here](https://huggingface.co/datasets/aractingi/lerobot-example-config-files/tree/main).
|
||||
Create the necessary json configuration files for the reward classifier and the environment. Check the examples [here](https://huggingface.co/datasets/lerobot/config_examples/resolve/main/reward_classifier/config.json).
|
||||
|
||||
2. **Collect a dataset**:
|
||||
|
||||
```bash
|
||||
python -m lerobot.scripts.rl.gym_manipulator --config_path src/lerobot/configs/env_config.json
|
||||
python -m lerobot.rl.gym_manipulator --config_path src/lerobot/configs/env_config.json
|
||||
```
|
||||
|
||||
3. **Train the classifier**:
|
||||
@@ -463,7 +788,7 @@ The reward classifier will automatically provide rewards based on the visual inp
|
||||
|
||||
4. **Test the classifier**:
|
||||
```bash
|
||||
python -m lerobot.scripts.rl.gym_manipulator --config_path src/lerobot/configs/env_config.json
|
||||
python -m lerobot.rl.gym_manipulator --config_path src/lerobot/configs/env_config.json
|
||||
```
|
||||
|
||||
### Training with Actor-Learner
|
||||
@@ -472,7 +797,7 @@ The LeRobot system uses a distributed actor-learner architecture for training. T
|
||||
|
||||
**Configuration Setup**
|
||||
|
||||
Create a training configuration file (example available [here](https://huggingface.co/datasets/aractingi/lerobot-example-config-files/blob/main/train_config_hilserl_so100.json)). The training config is based on the main `TrainRLServerPipelineConfig` class in `lerobot/configs/train.py`.
|
||||
Create a training configuration file (example available [here](https://huggingface.co/datasets/lerobot/config_examples/resolve/main/rl/train_config.json)). The training config is based on the main `TrainRLServerPipelineConfig` class in `lerobot/configs/train.py`.
|
||||
|
||||
1. Configure the policy settings (`type="sac"`, `device`, etc.)
|
||||
2. Set `dataset` to your cropped dataset
|
||||
@@ -485,7 +810,7 @@ Create a training configuration file (example available [here](https://huggingfa
|
||||
First, start the learner server process:
|
||||
|
||||
```bash
|
||||
python -m lerobot.scripts.rl.learner --config_path src/lerobot/configs/train_config_hilserl_so100.json
|
||||
python -m lerobot.rl.learner --config_path src/lerobot/configs/train_config_hilserl_so100.json
|
||||
```
|
||||
|
||||
The learner:
|
||||
@@ -500,7 +825,7 @@ The learner:
|
||||
In a separate terminal, start the actor process with the same configuration:
|
||||
|
||||
```bash
|
||||
python -m lerobot.scripts.rl.actor --config_path src/lerobot/configs/train_config_hilserl_so100.json
|
||||
python -m lerobot.rl.actor --config_path src/lerobot/configs/train_config_hilserl_so100.json
|
||||
```
|
||||
|
||||
The actor:
|
||||
|
||||
+62
-36
@@ -26,15 +26,18 @@ pip install -e ".[hilserl]"
|
||||
|
||||
## Configuration
|
||||
|
||||
To use `gym_hil` with LeRobot, you need to create a configuration file. An example is provided [here](https://huggingface.co/datasets/aractingi/lerobot-example-config-files/blob/main/gym_hil_env.json). Key configuration sections include:
|
||||
To use `gym_hil` with LeRobot, you need to create a configuration file. An example is provided [here](https://huggingface.co/datasets/lerobot/config_examples/resolve/main/rl/gym_hil/env_config.json). Key configuration sections include:
|
||||
|
||||
### Environment Type and Task
|
||||
|
||||
```json
|
||||
{
|
||||
"type": "hil",
|
||||
"name": "franka_sim",
|
||||
"task": "PandaPickCubeGamepad-v0",
|
||||
"env": {
|
||||
"type": "gym_manipulator",
|
||||
"name": "gym_hil",
|
||||
"task": "PandaPickCubeGamepad-v0",
|
||||
"fps": 10
|
||||
},
|
||||
"device": "cuda"
|
||||
}
|
||||
```
|
||||
@@ -45,28 +48,40 @@ Available tasks:
|
||||
- `PandaPickCubeGamepad-v0`: With gamepad control
|
||||
- `PandaPickCubeKeyboard-v0`: With keyboard control
|
||||
|
||||
### Gym Wrappers Configuration
|
||||
### Processor Configuration
|
||||
|
||||
```json
|
||||
"wrapper": {
|
||||
"gripper_penalty": -0.02,
|
||||
"control_time_s": 15.0,
|
||||
"use_gripper": true,
|
||||
"fixed_reset_joint_positions": [0.0, 0.195, 0.0, -2.43, 0.0, 2.62, 0.785],
|
||||
"end_effector_step_sizes": {
|
||||
"x": 0.025,
|
||||
"y": 0.025,
|
||||
"z": 0.025
|
||||
},
|
||||
"control_mode": "gamepad"
|
||||
{
|
||||
"env": {
|
||||
"processor": {
|
||||
"control_mode": "gamepad",
|
||||
"gripper": {
|
||||
"use_gripper": true,
|
||||
"gripper_penalty": -0.02
|
||||
},
|
||||
"reset": {
|
||||
"control_time_s": 15.0,
|
||||
"fixed_reset_joint_positions": [
|
||||
0.0, 0.195, 0.0, -2.43, 0.0, 2.62, 0.785
|
||||
]
|
||||
},
|
||||
"inverse_kinematics": {
|
||||
"end_effector_step_sizes": {
|
||||
"x": 0.025,
|
||||
"y": 0.025,
|
||||
"z": 0.025
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
Important parameters:
|
||||
|
||||
- `gripper_penalty`: Penalty for excessive gripper movement
|
||||
- `use_gripper`: Whether to enable gripper control
|
||||
- `end_effector_step_sizes`: Size of the steps in the x,y,z axes of the end-effector
|
||||
- `gripper.gripper_penalty`: Penalty for excessive gripper movement
|
||||
- `gripper.use_gripper`: Whether to enable gripper control
|
||||
- `inverse_kinematics.end_effector_step_sizes`: Size of the steps in the x,y,z axes of the end-effector
|
||||
- `control_mode`: Set to `"gamepad"` to use a gamepad controller
|
||||
|
||||
## Running with HIL RL of LeRobot
|
||||
@@ -75,39 +90,50 @@ Important parameters:
|
||||
|
||||
To run the environment, set mode to null:
|
||||
|
||||
<!-- prettier-ignore-start -->
|
||||
```python
|
||||
python -m lerobot.scripts.rl.gym_manipulator --config_path path/to/gym_hil_env.json
|
||||
```bash
|
||||
python -m lerobot.rl.gym_manipulator --config_path path/to/gym_hil_env.json
|
||||
```
|
||||
<!-- prettier-ignore-end -->
|
||||
|
||||
### Recording a Dataset
|
||||
|
||||
To collect a dataset, set the mode to `record` whilst defining the repo_id and number of episodes to record:
|
||||
|
||||
<!-- prettier-ignore-start -->
|
||||
```python
|
||||
python -m lerobot.scripts.rl.gym_manipulator --config_path path/to/gym_hil_env.json
|
||||
```json
|
||||
{
|
||||
"env": {
|
||||
"type": "gym_manipulator",
|
||||
"name": "gym_hil",
|
||||
"task": "PandaPickCubeGamepad-v0"
|
||||
},
|
||||
"dataset": {
|
||||
"repo_id": "username/sim_dataset",
|
||||
"root": null,
|
||||
"task": "pick_cube",
|
||||
"num_episodes_to_record": 10,
|
||||
"replay_episode": null,
|
||||
"push_to_hub": true
|
||||
},
|
||||
"mode": "record"
|
||||
}
|
||||
```
|
||||
|
||||
```bash
|
||||
python -m lerobot.rl.gym_manipulator --config_path path/to/gym_hil_env.json
|
||||
```
|
||||
<!-- prettier-ignore-end -->
|
||||
|
||||
### Training a Policy
|
||||
|
||||
To train a policy, checkout the configuration example available [here](https://huggingface.co/datasets/aractingi/lerobot-example-config-files/blob/main/train_gym_hil_env.json) and run the actor and learner servers:
|
||||
To train a policy, checkout the configuration example available [here](https://huggingface.co/datasets/lerobot/config_examples/resolve/main/rl/gym_hil/train_config.json) and run the actor and learner servers:
|
||||
|
||||
<!-- prettier-ignore-start -->
|
||||
```python
|
||||
python -m lerobot.scripts.rl.actor --config_path path/to/train_gym_hil_env.json
|
||||
```bash
|
||||
python -m lerobot.rl.actor --config_path path/to/train_gym_hil_env.json
|
||||
```
|
||||
<!-- prettier-ignore-end -->
|
||||
|
||||
In a different terminal, run the learner server:
|
||||
|
||||
<!-- prettier-ignore-start -->
|
||||
```python
|
||||
python -m lerobot.scripts.rl.learner --config_path path/to/train_gym_hil_env.json
|
||||
```bash
|
||||
python -m lerobot.rl.learner --config_path path/to/train_gym_hil_env.json
|
||||
```
|
||||
<!-- prettier-ignore-end -->
|
||||
|
||||
The simulation environment provides a safe and repeatable way to develop and test your Human-In-the-Loop reinforcement learning components before deploying to real robots.
|
||||
|
||||
|
||||
@@ -519,11 +519,14 @@ from lerobot.utils.control_utils import init_keyboard_listener
|
||||
from lerobot.utils.utils import log_say
|
||||
from lerobot.utils.visualization_utils import _init_rerun
|
||||
from lerobot.record import record_loop
|
||||
from lerobot.policies.factory import make_processor
|
||||
|
||||
NUM_EPISODES = 5
|
||||
FPS = 30
|
||||
EPISODE_TIME_SEC = 60
|
||||
TASK_DESCRIPTION = "My task description"
|
||||
HF_MODEL_ID = "<hf_username>/<model_repo_id>"
|
||||
HF_DATASET_ID = "<hf_username>/<eval_dataset_repo_id>"
|
||||
|
||||
# Create the robot configuration
|
||||
camera_config = {"front": OpenCVCameraConfig(index_or_path=0, width=640, height=480, fps=FPS)}
|
||||
@@ -535,7 +538,7 @@ robot_config = SO100FollowerConfig(
|
||||
robot = SO100Follower(robot_config)
|
||||
|
||||
# Initialize the policy
|
||||
policy = ACTPolicy.from_pretrained("<hf_username>/<my_policy_repo_id>")
|
||||
policy = ACTPolicy.from_pretrained(HF_MODEL_ID)
|
||||
|
||||
# Configure the dataset features
|
||||
action_features = hw_to_dataset_features(robot.action_features, "action")
|
||||
@@ -544,7 +547,7 @@ dataset_features = {**action_features, **obs_features}
|
||||
|
||||
# Create the dataset
|
||||
dataset = LeRobotDataset.create(
|
||||
repo_id="<hf_username>/eval_<dataset_repo_id>",
|
||||
repo_id=HF_DATASET_ID,
|
||||
fps=FPS,
|
||||
features=dataset_features,
|
||||
robot_type=robot.name,
|
||||
@@ -559,6 +562,12 @@ _init_rerun(session_name="recording")
|
||||
# Connect the robot
|
||||
robot.connect()
|
||||
|
||||
preprocessor, postprocessor = make_processor(
|
||||
policy_cfg=policy,
|
||||
pretrained_path=HF_MODEL_ID,
|
||||
dataset_stats=dataset.meta.stats,
|
||||
)
|
||||
|
||||
for episode_idx in range(NUM_EPISODES):
|
||||
log_say(f"Running inference, recording eval episode {episode_idx + 1} of {NUM_EPISODES}")
|
||||
|
||||
@@ -568,6 +577,8 @@ for episode_idx in range(NUM_EPISODES):
|
||||
events=events,
|
||||
fps=FPS,
|
||||
policy=policy,
|
||||
preprocessor=preprocessor,
|
||||
postprocessor=postprocessor,
|
||||
dataset=dataset,
|
||||
control_time_s=EPISODE_TIME_SEC,
|
||||
single_task=TASK_DESCRIPTION,
|
||||
|
||||
+58
-10
@@ -22,13 +22,38 @@ pip install -e ".[hilserl]"
|
||||
|
||||
## Teleoperate and Record a Dataset
|
||||
|
||||
To use `gym_hil` with LeRobot, you need to use a configuration file. An example config file can be found [here](https://huggingface.co/datasets/aractingi/lerobot-example-config-files/blob/main/env_config_gym_hil_il.json).
|
||||
To use `gym_hil` with LeRobot, you need to use a configuration file. An example config file can be found [here](https://huggingface.co/datasets/lerobot/config_examples/resolve/main/sim_il/env_config.json).
|
||||
|
||||
To teleoperate and collect a dataset, we need to modify this config file and you should add your `repo_id` here: `"repo_id": "il_gym",` and `"num_episodes": 30,` and make sure you set `mode` to `record`, "mode": "record".
|
||||
To teleoperate and collect a dataset, we need to modify this config file. Here's an example configuration for imitation learning data collection:
|
||||
|
||||
If you do not have a Nvidia GPU also change `"device": "cuda"` parameter in the config file (for example to `mps` for MacOS).
|
||||
```json
|
||||
{
|
||||
"env": {
|
||||
"type": "gym_manipulator",
|
||||
"name": "gym_hil",
|
||||
"task": "PandaPickCubeGamepad-v0",
|
||||
"fps": 10
|
||||
},
|
||||
"dataset": {
|
||||
"repo_id": "your_username/il_gym",
|
||||
"root": null,
|
||||
"task": "pick_cube",
|
||||
"num_episodes_to_record": 30,
|
||||
"replay_episode": null,
|
||||
"push_to_hub": true
|
||||
},
|
||||
"mode": "record",
|
||||
"device": "cuda"
|
||||
}
|
||||
```
|
||||
|
||||
By default the config file assumes you use a controller. To use your keyboard please change the envoirment specified at `"task"` in the config file and set it to `"PandaPickCubeKeyboard-v0"`.
|
||||
Key configuration points:
|
||||
|
||||
- Set your `repo_id` in the `dataset` section: `"repo_id": "your_username/il_gym"`
|
||||
- Set `num_episodes_to_record: 30` to collect 30 demonstration episodes
|
||||
- Ensure `mode` is set to `"record"`
|
||||
- If you don't have an NVIDIA GPU, change `"device": "cuda"` to `"mps"` for macOS or `"cpu"`
|
||||
- To use keyboard instead of gamepad, change `"task"` to `"PandaPickCubeKeyboard-v0"`
|
||||
|
||||
Then we can run this command to start:
|
||||
|
||||
@@ -36,14 +61,14 @@ Then we can run this command to start:
|
||||
<hfoption id="Linux">
|
||||
|
||||
```bash
|
||||
python -m lerobot.scripts.rl.gym_manipulator --config_path path/to/env_config_gym_hil_il.json
|
||||
python -m lerobot.rl.gym_manipulator --config_path path/to/env_config_gym_hil_il.json
|
||||
```
|
||||
|
||||
</hfoption>
|
||||
<hfoption id="MacOS">
|
||||
|
||||
```bash
|
||||
mjpython -m lerobot.scripts.rl.gym_manipulator --config_path path/to/env_config_gym_hil_il.json
|
||||
mjpython -m lerobot.rl.gym_manipulator --config_path path/to/env_config_gym_hil_il.json
|
||||
```
|
||||
|
||||
</hfoption>
|
||||
@@ -140,9 +165,32 @@ huggingface-cli upload ${HF_USER}/il_sim_test${CKPT} \
|
||||
|
||||
## Evaluate your policy in Sim
|
||||
|
||||
To evaluate your policy we have to use the config file that can be found [here](https://huggingface.co/datasets/aractingi/lerobot-example-config-files/blob/main/eval_config_gym_hil.json).
|
||||
To evaluate your policy we have to use a configuration file. An example can be found [here](https://huggingface.co/datasets/lerobot/config_examples/resolve/main/sim_il/eval_config.json).
|
||||
|
||||
Make sure to replace the `repo_id` with the dataset you trained on, for example `pepijn223/il_sim_dataset` and replace the `pretrained_policy_name_or_path` with your model id, for example `pepijn223/il_sim_model`
|
||||
Here's an example evaluation configuration:
|
||||
|
||||
```json
|
||||
{
|
||||
"env": {
|
||||
"type": "gym_manipulator",
|
||||
"name": "gym_hil",
|
||||
"task": "PandaPickCubeGamepad-v0",
|
||||
"fps": 10
|
||||
},
|
||||
"dataset": {
|
||||
"repo_id": "your_username/il_sim_dataset",
|
||||
"dataset_root": null,
|
||||
"task": "pick_cube"
|
||||
},
|
||||
"pretrained_policy_name_or_path": "your_username/il_sim_model",
|
||||
"device": "cuda"
|
||||
}
|
||||
```
|
||||
|
||||
Make sure to replace:
|
||||
|
||||
- `repo_id` with the dataset you trained on (e.g., `your_username/il_sim_dataset`)
|
||||
- `pretrained_policy_name_or_path` with your model ID (e.g., `your_username/il_sim_model`)
|
||||
|
||||
Then you can run this command to visualize your trained policy
|
||||
|
||||
@@ -150,14 +198,14 @@ Then you can run this command to visualize your trained policy
|
||||
<hfoption id="Linux">
|
||||
|
||||
```bash
|
||||
python -m lerobot.scripts.rl.eval_policy --config_path=path/to/eval_config_gym_hil.json
|
||||
python -m lerobot.rl.eval_policy --config_path=path/to/eval_config_gym_hil.json
|
||||
```
|
||||
|
||||
</hfoption>
|
||||
<hfoption id="MacOS">
|
||||
|
||||
```bash
|
||||
mjpython -m lerobot.scripts.rl.eval_policy --config_path=path/to/eval_config_gym_hil.json
|
||||
mjpython -m lerobot.rl.eval_policy --config_path=path/to/eval_config_gym_hil.json
|
||||
```
|
||||
|
||||
</hfoption>
|
||||
|
||||
@@ -0,0 +1,273 @@
|
||||
# Implement your own Robot Processor
|
||||
|
||||
In this tutorial, you'll learn how to implement your own Robot Processor.
|
||||
It begins by exploring the need for a custom processor, then uses the `NormalizerProcessorStep` as the running example to explain how to implement, configure, and serialize a processor. Finally, it lists all helper processors that ship with LeRobot.
|
||||
|
||||
## Why would you need a custom processor?
|
||||
|
||||
In most cases, when reading raw data from sensors or when models output actions, you need to process this data to make it compatible with your target system. For example, a common need is normalizing data ranges to make them suitable for neural networks.
|
||||
|
||||
LeRobot's `NormalizerProcessorStep` handles this crucial task:
|
||||
|
||||
```python
|
||||
# Input: raw joint positions in [0, 180] degrees
|
||||
raw_action = torch.tensor([90.0, 45.0, 135.0])
|
||||
|
||||
# After processing: normalized to [-1, 1] range for model training
|
||||
normalizer = NormalizerProcessorStep(features=features, norm_map=norm_map, stats=dataset_stats)
|
||||
normalized_result = normalizer(transition)
|
||||
# ...
|
||||
```
|
||||
|
||||
Other common processing needs include:
|
||||
|
||||
- **Device placement**: Moving tensors between CPU/GPU and converting data types
|
||||
- **Format conversion**: Transforming between different data structures
|
||||
- **Batching**: Adding/removing batch dimensions for model compatibility
|
||||
- **Safety constraints**: Applying limits to robot commands
|
||||
|
||||
```python
|
||||
# Example pipeline combining multiple processors
|
||||
pipeline = PolicyProcessorPipeline([
|
||||
RenameObservationsProcessorStep(rename_map={}),
|
||||
AddBatchDimensionProcessorStep(),
|
||||
NormalizerProcessorStep(features=features, stats=stats),
|
||||
DeviceProcessorStep(device="cuda"),
|
||||
# ...
|
||||
])
|
||||
```
|
||||
|
||||
LeRobot provides a pipeline mechanism to implement sequences of processing steps for both input data and output actions, making it easy to compose these transformations in the right order for optimal performance.
|
||||
|
||||
## How to implement your own processor?
|
||||
|
||||
We'll use the `NormalizerProcessorStep` as our main example because it demonstrates essential processor patterns including state management, configuration serialization, and tensor handling that you'll commonly need.
|
||||
|
||||
Prepare the sequence of processing steps necessary for your problem. A processor step is a class that implements the following methods:
|
||||
|
||||
- `__call__`: implements the processing step for the input transition.
|
||||
- `get_config`: gets the configuration of the processor step.
|
||||
- `state_dict`: gets the state of the processor step.
|
||||
- `load_state_dict`: loads the state of the processor step.
|
||||
- `reset`: resets the state of the processor step.
|
||||
- `feature_contract`: displays the modification to the feature space during the processor step.
|
||||
|
||||
### Implement the `__call__` method
|
||||
|
||||
The `__call__` method is the core of your processor step. It takes an `EnvTransition` and returns a modified `EnvTransition`. Here's how the `NormalizerProcessorStep` works:
|
||||
|
||||
```python
|
||||
@dataclass
|
||||
@ProcessorStepRegistry.register("normalizer_processor")
|
||||
class NormalizerProcessorStep(ProcessorStep):
|
||||
"""Normalize observations/actions using dataset statistics."""
|
||||
|
||||
features: dict[str, PolicyFeature]
|
||||
norm_map: dict[FeatureType, NormalizationMode]
|
||||
stats: dict[str, dict[str, Any]] | None = None
|
||||
eps: float = 1e-8
|
||||
_tensor_stats: dict = field(default_factory=dict, init=False, repr=False)
|
||||
|
||||
def __post_init__(self):
|
||||
"""Convert stats to tensors for efficient computation."""
|
||||
self.stats = self.stats or {}
|
||||
self._tensor_stats = to_tensor(self.stats, device=self.device, dtype=torch.float32)
|
||||
|
||||
def __call__(self, transition: EnvTransition) -> EnvTransition:
|
||||
new_transition = transition.copy()
|
||||
# Normalize observations
|
||||
# ...
|
||||
# Normalize action
|
||||
# ...
|
||||
return new_transition
|
||||
|
||||
```
|
||||
|
||||
See the full implementation in `src/lerobot/processor/normalize_processor.py` for complete details.
|
||||
|
||||
**Key principles:**
|
||||
|
||||
- **Always use `transition.copy()`** to avoid side effects
|
||||
- **Handle both observations and actions** consistently
|
||||
- **Separate config from state**: `get_config()` returns JSON-serializable params, `state_dict()` returns tensors
|
||||
- **Convert stats to tensors** in `__post_init__()` for efficient computation
|
||||
|
||||
### Configuration and State Management
|
||||
|
||||
Processors support serialization through three methods that separate configuration from tensor state. The `NormalizerProcessorStep` demonstrates this perfectly - it carries dataset statistics (tensors) in its state, and hyperparameters in its config:
|
||||
|
||||
```python
|
||||
# Continuing the NormalizerProcessorStep example...
|
||||
|
||||
def get_config(self) -> dict[str, Any]:
|
||||
"""JSON-serializable configuration (no tensors)."""
|
||||
return {
|
||||
"eps": self.eps,
|
||||
"features": {k: {"type": v.type.value, "shape": v.shape} for k, v in self.features.items()},
|
||||
"norm_map": {ft.value: nm.value for ft, nm in self.norm_map.items()},
|
||||
# ...
|
||||
}
|
||||
|
||||
def state_dict(self) -> dict[str, torch.Tensor]:
|
||||
"""Tensor state only (e.g., dataset statistics)."""
|
||||
flat: dict[str, torch.Tensor] = {}
|
||||
for key, sub in self._tensor_stats.items():
|
||||
for stat_name, tensor in sub.items():
|
||||
flat[f"{key}.{stat_name}"] = tensor.cpu() # Always save to CPU
|
||||
return flat
|
||||
|
||||
def load_state_dict(self, state: dict[str, torch.Tensor]) -> None:
|
||||
"""Restore tensor state at runtime."""
|
||||
self._tensor_stats.clear()
|
||||
for flat_key, tensor in state.items():
|
||||
key, stat_name = flat_key.rsplit(".", 1)
|
||||
# Load to processor's configured device
|
||||
self._tensor_stats.setdefault(key, {})[stat_name] = tensor.to(
|
||||
dtype=torch.float32, device=self.device
|
||||
)
|
||||
# ...
|
||||
```
|
||||
|
||||
**Usage:**
|
||||
|
||||
```python
|
||||
# Save (e.g., inside a policy)
|
||||
config = normalizer.get_config()
|
||||
tensors = normalizer.state_dict()
|
||||
|
||||
# Restore (e.g., loading a pretrained policy)
|
||||
new_normalizer = NormalizerProcessorStep(**config)
|
||||
new_normalizer.load_state_dict(tensors)
|
||||
# Now new_normalizer has the same stats and configuration
|
||||
```
|
||||
|
||||
### Transform features
|
||||
|
||||
The `transform_features` method defines how your processor transforms feature names and shapes. This is crucial for policy configuration and debugging.
|
||||
|
||||
For `NormalizerProcessorStep`, features are typically preserved unchanged since normalization doesn't alter keys or shapes:
|
||||
|
||||
```python
|
||||
def transform_features(self, features: dict[PipelineFeatureType, dict[str, PolicyFeature]]) -> dict[PipelineFeatureType, dict[str, PolicyFeature]]:
|
||||
"""Normalization preserves all feature definitions."""
|
||||
return features # No changes to feature structure
|
||||
# ...
|
||||
```
|
||||
|
||||
When your processor renames or reshapes data, implement this method to reflect the mapping for downstream components. For example, a simple rename processor:
|
||||
|
||||
```python
|
||||
def transform_features(self, features: dict[str, PolicyFeature]) -> dict[str, PolicyFeature]:
|
||||
# Simple renaming
|
||||
if "pixels" in features:
|
||||
features["observation.image"] = features.pop("pixels")
|
||||
|
||||
# Pattern-based renaming
|
||||
for key in list(features.keys()):
|
||||
if key.startswith("env_state."):
|
||||
suffix = key[len("env_state."):]
|
||||
features[f"observation.{suffix}"] = features.pop(key)
|
||||
# ...
|
||||
|
||||
return features
|
||||
```
|
||||
|
||||
**Key principles:**
|
||||
|
||||
- Use `features.pop(old_key)` to remove and get the old feature
|
||||
- Use `features[new_key] = old_feature` to add the renamed feature
|
||||
- Always return the modified features dictionary
|
||||
- Document transformations clearly in the docstring
|
||||
|
||||
### Using overrides
|
||||
|
||||
You can override step parameters at load-time using `overrides`. This is handy for non-serializable objects or site-specific settings. It works both in policy factories and with `DataProcessorPipeline.from_pretrained(...)`.
|
||||
|
||||
**Foundational model adaptation**: This is particularly useful when working with foundational pretrained policies where you rarely have access to the original training statistics. You can inject your own dataset statistics to adapt the normalizer to your specific robot or environment data.
|
||||
|
||||
Example: during policy evaluation on the robot, override the device and rename map.
|
||||
Use this to run a policy trained on CUDA on a CPU-only robot, or to remap camera keys when the robot uses different names than the dataset.
|
||||
|
||||
Direct usage with `from_pretrained`:
|
||||
|
||||
```python
|
||||
from lerobot.processor import RobotProcessorPipeline
|
||||
|
||||
# Load a foundational policy trained on diverse robot data
|
||||
# but adapt normalization to your specific robot/environment
|
||||
new_stats = LeRobotDataset(repo_id="username/my-dataset").meta.stats
|
||||
processor = RobotProcessorPipeline.from_pretrained(
|
||||
"huggingface/foundational-robot-policy", # Pretrained foundation model
|
||||
overrides={
|
||||
"normalizer_processor": {"stats": new_stats}, # Inject your robot's statistics
|
||||
"device_processor": {"device": "cuda:0"}, # registry name for registered steps
|
||||
"rename_processor": {"rename_map": robot_key_map}, # Map your robot's observation keys
|
||||
# ...
|
||||
},
|
||||
)
|
||||
```
|
||||
|
||||
## Best Practices
|
||||
|
||||
Based on analysis of all LeRobot processor implementations, here are the key patterns and practices:
|
||||
|
||||
### 1. **Safe Data Handling**
|
||||
|
||||
Always create copies of input data to avoid unintended side effects. Use `transition.copy()` and `observation.copy()` rather than modifying data in-place. This prevents your processor from accidentally affecting other components in the pipeline.
|
||||
|
||||
Check for required data before processing and handle missing data gracefully. If your processor expects certain keys (like `"pixels"` for image processing), validate their presence first. For optional data, use safe access patterns like `transition.get()` and handle `None` values appropriately.
|
||||
|
||||
When data validation fails, provide clear, actionable error messages that help users understand what went wrong and how to fix it.
|
||||
|
||||
### 2. **Choose Appropriate Base Classes**
|
||||
|
||||
LeRobot provides specialized base classes that reduce boilerplate code and ensure consistency. Use `ObservationProcessorStep` when you only need to modify observations, `ActionProcessorStep` for action-only processing, and `RobotActionProcessorStep` specifically for dictionary-based robot actions.
|
||||
|
||||
Only inherit directly from `ProcessorStep` when you need full control over the entire transition or when processing multiple transition components simultaneously. The specialized base classes handle the transition management for you and provide type safety.
|
||||
|
||||
### 3. **Registration and Naming**
|
||||
|
||||
Register your processors with descriptive, namespaced names using `@ProcessorStepRegistry.register()`. Use organization prefixes like `"robotics_lab/safety_clipper"` or `"acme_corp/vision_enhancer"` to avoid naming conflicts. Avoid generic names like `"processor"` or `"step"` that could clash with other implementations.
|
||||
|
||||
Good registration makes your processors discoverable and enables clean serialization/deserialization when saving and loading pipelines.
|
||||
|
||||
### 4. **State Management Patterns**
|
||||
|
||||
Distinguish between configuration parameters (JSON-serializable values) and internal state (tensors, buffers). Use dataclass fields with `init=False, repr=False` for internal state that shouldn't appear in the constructor or string representation.
|
||||
|
||||
Implement the `reset()` method to clear internal state between episodes. This is crucial for stateful processors that accumulate data over time, like moving averages or temporal filters.
|
||||
|
||||
Remember that `get_config()` should only return JSON-serializable configuration, while `state_dict()` handles tensor state separately.
|
||||
|
||||
### 5. **Input Validation and Error Handling**
|
||||
|
||||
Validate input types and shapes before processing. Check tensor properties like `dtype` and dimensions to ensure compatibility with your algorithms. For robot actions, verify that required pose components or joint values are present and within expected ranges.
|
||||
|
||||
Use early returns for edge cases where no processing is needed. Provide clear, descriptive error messages that include the expected vs. actual data types or shapes. This makes debugging much easier for users.
|
||||
|
||||
### 6. **Device and Dtype Awareness**
|
||||
|
||||
Design your processors to automatically adapt to the device and dtype of input tensors. Internal tensors (like normalization statistics) should match the input tensor's device and dtype to ensure compatibility with multi-GPU training, mixed precision, and distributed setups.
|
||||
|
||||
Implement a `to()` method that moves your processor's internal state to the specified device. Check device/dtype compatibility at runtime and automatically migrate internal state when needed. This pattern enables seamless operation across different hardware configurations without manual intervention.
|
||||
|
||||
## Conclusion
|
||||
|
||||
You now have all the tools to implement custom processors in LeRobot! The key steps are:
|
||||
|
||||
1. **Define your processor** as a dataclass with the required methods (`__call__`, `get_config`, `state_dict`, `load_state_dict`, `reset`, `transform_features`)
|
||||
2. **Register it** using `@ProcessorStepRegistry.register("name")` for discoverability
|
||||
3. **Integrate it** into a `DataProcessorPipeline` with other processing steps
|
||||
4. **Use base classes** like `ObservationProcessorStep` when possible to reduce boilerplate
|
||||
5. **Implement device/dtype awareness** to support multi-GPU and mixed precision setups
|
||||
|
||||
The processor system is designed to be modular and composable, allowing you to build complex data processing pipelines from simple, focused components. Whether you're preprocessing sensor data for training or post-processing model outputs for robot execution, custom processors give you the flexibility to handle any data transformation your robotics application requires.
|
||||
|
||||
Key principles for robust processors:
|
||||
|
||||
- **Device/dtype adaptation**: Internal tensors should match input tensors
|
||||
- **Clear error messages**: Help users understand what went wrong
|
||||
- **Base class usage**: Leverage specialized base classes to reduce boilerplate
|
||||
- **Feature contracts**: Declare data structure changes with `transform_features()`
|
||||
|
||||
Start simple, test thoroughly, and ensure your processors work seamlessly across different hardware configurations!
|
||||
@@ -0,0 +1,314 @@
|
||||
# Introduction to Processors
|
||||
|
||||
In robotics, there's a fundamental mismatch between the data that robots and humans produce and what machine learning models expect.
|
||||
Robots output raw sensor data like camera images and joint positions that need normalization, batching, and device placement before models can process them.
|
||||
Language instructions from humans must be tokenized into numerical representations, and different robots use different coordinate systems that need standardization.
|
||||
|
||||
The challenge extends to model outputs as well.
|
||||
Models might output end-effector positions while robots need joint-space commands, or teleoperators produce relative movements while robots expect absolute commands.
|
||||
Model predictions are often normalized and need conversion back to real-world scales.
|
||||
|
||||
Cross-domain translation adds another layer of complexity.
|
||||
Training data from one robot setup needs adaptation for deployment on different hardware, models trained with specific camera configurations must work with new arrangements, and datasets with different naming conventions need harmonization.
|
||||
|
||||
**That's where processors come in.** They serve as universal translators that bridge these gaps, ensuring seamless data flow from sensors to models to actuators.
|
||||
Processors handle all the preprocessing and postprocessing steps needed to convert raw environment data into model-ready inputs and vice versa.
|
||||
|
||||
This means that your favorite policy can be used like this:
|
||||
|
||||
```python
|
||||
import torch
|
||||
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
from lerobot.policies.factory import make_pre_post_processors
|
||||
from lerobot.policies.your_policy import YourPolicy
|
||||
from lerobot.processor.pipeline import RobotProcessorPipeline, PolicyProcessorPipeline
|
||||
dataset = LeRobotDataset("hf_user/dataset", episodes=[0])
|
||||
sample = dataset[10]
|
||||
|
||||
model = YourPolicy.from_pretrained(
|
||||
"hf_user/model",
|
||||
)
|
||||
model.eval()
|
||||
model.to("cuda")
|
||||
preprocessor, postprocessor = make_pre_post_processors(model.config, pretrained_path="hf_user/model", dataset_stats=dataset.meta.stats)
|
||||
|
||||
preprocessed_sample = preprocessor(sample)
|
||||
action = model.select_action(preprocessed_sample)
|
||||
postprocessed_action = postprocessor(action)
|
||||
```
|
||||
|
||||
## What are Processors?
|
||||
|
||||
In robotics, data comes in many forms: images from cameras, joint positions from sensors, text instructions from users, and more. Each type of data requires specific transformations before a model can use it effectively. Models need this data to be:
|
||||
|
||||
- **Normalized**: Scaled to appropriate ranges for neural network processing
|
||||
- **Batched**: Organized with proper dimensions for batch processing
|
||||
- **Tokenized**: Text converted to numerical representations
|
||||
- **Device-placed**: Moved to the right hardware (CPU/GPU)
|
||||
- **Type-converted**: Cast to appropriate data types
|
||||
|
||||
Processors handle these transformations through composable, reusable steps that can be chained together into pipelines. Think of them as a modular assembly line where each station performs a specific transformation on your data.
|
||||
|
||||
## Core Concepts
|
||||
|
||||
### EnvTransition: The Universal Data Container
|
||||
|
||||
The `EnvTransition` is the fundamental data structure that flows through all processors.
|
||||
It's a typed dictionary that represents a complete robot-environment interaction:
|
||||
|
||||
- **OBSERVATION**: All sensor data (images, states, proprioception)
|
||||
- **ACTION**: The action to execute or that was executed
|
||||
- **REWARD**: Reinforcement learning signal
|
||||
- **DONE/TRUNCATED**: Episode boundary indicators
|
||||
- **INFO**: Arbitrary metadata
|
||||
- **COMPLEMENTARY_DATA**: Task descriptions, indices, padding flags, inter-step data
|
||||
|
||||
### ProcessorStep: The Building Block
|
||||
|
||||
A `ProcessorStep` is a single transformation unit that processes transitions. It's an abstract base class with two required methods:
|
||||
|
||||
```python
|
||||
from lerobot.processor import ProcessorStep, EnvTransition
|
||||
|
||||
class MyProcessorStep(ProcessorStep):
|
||||
"""Example processor step - inherit and implement abstract methods."""
|
||||
|
||||
def __call__(self, transition: EnvTransition) -> EnvTransition:
|
||||
"""Transform the transition - REQUIRED abstract method."""
|
||||
# Your processing logic here
|
||||
return transition
|
||||
|
||||
def transform_features(self, features):
|
||||
"""Declare how this step transforms feature shapes/types - REQUIRED abstract method."""
|
||||
return features # Most processors return features unchanged
|
||||
```
|
||||
|
||||
`__call__` is the core of your processor step. It takes an `EnvTransition` and returns a modified `EnvTransition`.
|
||||
|
||||
`transform_features` is used to declare how this step transforms feature shapes/types.
|
||||
|
||||
### DataProcessorPipeline: The Generic Orchestrator
|
||||
|
||||
The `DataProcessorPipeline[TInput, TOutput]` chains multiple `ProcessorStep` instances together:
|
||||
|
||||
```python
|
||||
from lerobot.processor import RobotProcessorPipeline, PolicyProcessorPipeline
|
||||
|
||||
# For robot hardware (unbatched data)
|
||||
robot_processor = RobotProcessorPipeline[RobotAction, RobotAction](
|
||||
steps=[step1, step2, step3],
|
||||
name="robot_pipeline"
|
||||
)
|
||||
|
||||
# For model training/inference (batched data)
|
||||
policy_processor = PolicyProcessorPipeline[dict[str, Any], dict[str, Any]](
|
||||
steps=[step1, step2, step3],
|
||||
name="policy_pipeline"
|
||||
)
|
||||
```
|
||||
|
||||
## RobotProcessorPipeline vs PolicyProcessorPipeline
|
||||
|
||||
The key distinction is in the data structures they handle:
|
||||
|
||||
| Aspect | RobotProcessorPipeline | PolicyProcessorPipeline |
|
||||
| --------------- | -------------------------------------------- | ---------------------------------------- |
|
||||
| **Input** | `dict[str, Any]` - Individual robot values | `dict[str, Any]` - Batched tensors |
|
||||
| **Output** | `dict[str, Any]` - Individual robot commands | `torch.Tensor` - Policy predictions |
|
||||
| **Use Case** | Real-time robot control | Model training/inference |
|
||||
| **Data Format** | Unbatched, heterogeneous | Batched, homogeneous |
|
||||
| **Examples** | `{"joint_1": 0.5}` | `{"observation.state": tensor([[0.5]])}` |
|
||||
|
||||
**Use `RobotProcessorPipeline`** for robot hardware interfaces:
|
||||
|
||||
```python
|
||||
# Robot data structures: dict[str, Any] for observations and actions
|
||||
robot_obs: dict[str, Any] = {
|
||||
"joint_1": 0.5, # Individual joint values
|
||||
"joint_2": -0.3,
|
||||
"camera_0": image_array # Raw camera data
|
||||
}
|
||||
|
||||
robot_action: dict[str, Any] = {
|
||||
"joint_1": 0.2, # Target joint positions
|
||||
"joint_2": 0.1,
|
||||
"gripper": 0.8
|
||||
}
|
||||
```
|
||||
|
||||
**Use `PolicyProcessorPipeline`** for model training and batch processing:
|
||||
|
||||
```python
|
||||
# Policy data structures: batch dicts and tensors
|
||||
policy_batch: dict[str, Any] = {
|
||||
"observation.state": torch.tensor([[0.5, -0.3]]), # Batched states
|
||||
"observation.images.camera0": torch.tensor(...), # Batched images
|
||||
"action": torch.tensor([[0.2, 0.1, 0.8]]) # Batched actions
|
||||
}
|
||||
|
||||
policy_action: torch.Tensor = torch.tensor([[0.2, 0.1, 0.8]]) # Model output tensor
|
||||
```
|
||||
|
||||
## Converter Functions
|
||||
|
||||
LeRobot provides converter functions to bridge different data formats in `lerobot.processor.converters`. These functions handle the crucial translations between robot hardware data structures, policy model formats, and the internal `EnvTransition` representation that flows through processor pipelines.
|
||||
|
||||
| Category | Function | Description |
|
||||
| ------------------------------ | ----------------------------- | ------------------------------- |
|
||||
| **Robot Hardware Converters** | `robot_action_to_transition` | Robot dict → EnvTransition |
|
||||
| | `observation_to_transition` | Robot obs → EnvTransition |
|
||||
| | `transition_to_robot_action` | EnvTransition → Robot dict |
|
||||
| **Policy/Training Converters** | `batch_to_transition` | Batch dict → EnvTransition |
|
||||
| | `transition_to_batch` | EnvTransition → Batch dict |
|
||||
| | `policy_action_to_transition` | Policy tensor → EnvTransition |
|
||||
| | `transition_to_policy_action` | EnvTransition → Policy tensor |
|
||||
| **Utilities** | `create_transition` | Build transitions with defaults |
|
||||
| | `identity_transition` | Pass-through converter |
|
||||
|
||||
The key insight is that **robot hardware converters** work with individual values and dictionaries, while **policy/training converters** work with batched tensors and model outputs. The converter functions automatically handle the structural differences, so your processor steps can focus on the core transformations without worrying about data format compatibility.
|
||||
|
||||
## Processor Examples
|
||||
|
||||
The following examples demonstrate real-world processor configurations for policy training and inference.
|
||||
|
||||
Here is an example processor for policy training and inference:
|
||||
|
||||
```python
|
||||
# Training data preprocessing (optimized order for GPU performance)
|
||||
training_preprocessor = PolicyProcessorPipeline[dict[str, Any], dict[str, Any]](
|
||||
steps=[
|
||||
RenameObservationsProcessorStep(rename_map={}), # Standardize keys
|
||||
AddBatchDimensionProcessorStep(), # Add batch dims
|
||||
TokenizerProcessorStep(tokenizer_name="...", ...), # Tokenize language
|
||||
DeviceProcessorStep(device="cuda"), # Move to GPU first
|
||||
NormalizerProcessorStep(features=..., stats=...), # Normalize on GPU
|
||||
]
|
||||
)
|
||||
|
||||
# Model output postprocessing
|
||||
training_postprocessor = PolicyProcessorPipeline[torch.Tensor, torch.Tensor](
|
||||
steps=[
|
||||
DeviceProcessorStep(device="cpu"), # Move to CPU
|
||||
UnnormalizerProcessorStep(features=..., stats=...), # Denormalize
|
||||
]
|
||||
to_transition=policy_action_to_transition,
|
||||
to_output=transition_to_policy_action,
|
||||
)
|
||||
```
|
||||
|
||||
### An interaction between a robot and a policy with processors
|
||||
|
||||
The most common real-world scenario combines both pipeline types robot hardware generates observations that need policy processing, and policy outputs need robot-compatible postprocessing:
|
||||
|
||||
```python
|
||||
# Real deployment: Robot sensors → Model → Robot commands
|
||||
with torch.no_grad():
|
||||
while not done:
|
||||
raw_obs = robot.get_observation() # dict[str, Any]
|
||||
|
||||
# Add your robot observation to policy observation processor
|
||||
|
||||
policy_input = policy_preprocessor(raw_obs) # Batched dict
|
||||
|
||||
policy_output = policy.select_action(policy_input) # Policy tensor
|
||||
|
||||
policy_action = policy_postprocessor(policy_output)
|
||||
|
||||
# Add your robot action to policy action processor
|
||||
|
||||
robot.send_action(policy_action)
|
||||
```
|
||||
|
||||
## Feature Contracts: Shape and Type Transformation
|
||||
|
||||
Processors don't just transform data - they can also **change the data structure itself**. The `transform_features()` method declares these changes, which is crucial for dataset recording and policy creation.
|
||||
|
||||
### Why Feature Contracts Matter
|
||||
|
||||
When building datasets or policies, LeRobot needs to know:
|
||||
|
||||
- **What data fields will exist** after processing
|
||||
- **What shapes and types** each field will have
|
||||
- **How to configure models** for the expected data structure
|
||||
|
||||
```python
|
||||
# Example: A processor that adds velocity to observations
|
||||
class VelocityProcessor(ObservationProcessorStep):
|
||||
def observation(self, obs):
|
||||
new_obs = obs.copy()
|
||||
if "observation.state" in obs:
|
||||
# concatenate computed velocity field to the state
|
||||
new_obs["observation.state"] = self._compute_velocity(obs["observation.state"])
|
||||
return new_obs
|
||||
|
||||
def transform_features(self, features):
|
||||
"""Declare the new velocity field we're adding."""
|
||||
state_feature = features[PipelineFeatureType.OBSERVATION].get("observation.state")
|
||||
if state_feature:
|
||||
double_shape = (state_feature.shape[0] * 2,) if state_feature.shape else (2,)
|
||||
features[PipelineFeatureType.OBSERVATION]["observation.state"] = PolicyFeature(
|
||||
type=FeatureType.STATE, shape=double_shape
|
||||
)
|
||||
return features
|
||||
```
|
||||
|
||||
### Feature Specification Functions
|
||||
|
||||
`create_initial_features()` and `aggregate_pipeline_dataset_features()` solve a critical dataset creation problem: determining the exact final data structure before any data is processed.
|
||||
Since processor pipelines can add new features (like velocity fields), change tensor shapes (like cropping images), or rename keys, datasets need to know the complete output specification upfront to allocate proper storage and define schemas.
|
||||
These functions work together by starting with robot hardware specifications (`create_initial_features()`) then simulating the entire pipeline transformation (`aggregate_pipeline_dataset_features()`) to compute the final feature dictionary that gets passed to `LeRobotDataset.create()`, ensuring perfect alignment between what processors output and what datasets expect to store.
|
||||
|
||||
```python
|
||||
from lerobot.datasets.pipeline_features import aggregate_pipeline_dataset_features
|
||||
|
||||
# Start with robot's raw features
|
||||
initial_features = create_initial_features(
|
||||
observation=robot.observation_features, # {"joint_1.pos": float, "camera_0": (480,640,3)}
|
||||
action=robot.action_features # {"joint_1.pos": float, "gripper.pos": float}
|
||||
)
|
||||
|
||||
# Apply processor pipeline to compute final features
|
||||
final_features = aggregate_pipeline_dataset_features(
|
||||
pipeline=my_processor_pipeline,
|
||||
initial_features=initial_features,
|
||||
use_videos=True
|
||||
)
|
||||
|
||||
# Use for dataset creation
|
||||
dataset = LeRobotDataset.create(
|
||||
repo_id="my_dataset",
|
||||
features=final_features, # Knows exactly what data to expect
|
||||
...
|
||||
)
|
||||
```
|
||||
|
||||
## Common Processor Steps
|
||||
|
||||
LeRobot provides many registered processor steps. Here are the most commonly used core processors:
|
||||
|
||||
### Essential Processors
|
||||
|
||||
- **`normalizer_processor`**: Normalize observations/actions using dataset statistics (mean/std or min/max)
|
||||
- **`device_processor`**: Move tensors to CPU/GPU with optional dtype conversion
|
||||
- **`to_batch_processor`**: Add batch dimensions to transitions for model compatibility
|
||||
- **`rename_observations_processor`**: Rename observation keys using mapping dictionaries
|
||||
- **`tokenizer_processor`**: Tokenize natural language task descriptions into tokens and attention masks
|
||||
|
||||
### Next Steps
|
||||
|
||||
- **[Implement Your Own Processor](implement_your_own_processor.mdx)** - Create custom processor steps
|
||||
- **[Debug Your Pipeline](debug_processor_pipeline.mdx)** - Troubleshoot and optimize pipelines
|
||||
- **[Processors for Robots and Teleoperators](processors_robots_teleop.mdx)** - Real-world integration patterns
|
||||
|
||||
## Summary
|
||||
|
||||
Processors solve the data translation problem in robotics by providing:
|
||||
|
||||
- **Modular transformations**: Composable, reusable processing steps
|
||||
- **Type safety**: Generic pipelines with compile-time checking
|
||||
- **Performance optimization**: GPU-accelerated operations
|
||||
- **Robot/Policy distinction**: Separate pipelines for different data structures
|
||||
- **Comprehensive ecosystem**: 30+ registered processors for common tasks
|
||||
|
||||
The key insight: `RobotProcessorPipeline` handles unbatched robot hardware data, while `PolicyProcessorPipeline` handles batched model data. Choose the right tool for your data structure!
|
||||
@@ -0,0 +1,281 @@
|
||||
# LeRobotDataset v3.0
|
||||
|
||||
`LeRobotDataset v3.0` is a standardized format for robot learning data. It provides unified access to multi-modal time-series data, sensorimotor signals and multi‑camera video, as well as rich metadata for indexing, search, and visualization on the Hugging Face Hub.
|
||||
|
||||
This docs will guide you to:
|
||||
|
||||
- Understand the v3.0 design and directory layout
|
||||
- Record a dataset and push it to the Hub
|
||||
- Load datasets for training with `LeRobotDataset`
|
||||
- Stream datasets without downloading using `StreamingLeRobotDataset`
|
||||
- Apply image transforms for data augmentation during training
|
||||
- Migrate existing `v2.1` datasets to `v3.0`
|
||||
|
||||
## What’s new in `v3`
|
||||
|
||||
- **File-based storage**: Many episodes per Parquet/MP4 file (v2 used one file per episode).
|
||||
- **Relational metadata**: Episode boundaries and lookups are resolved through metadata, not filenames.
|
||||
- **Hub-native streaming**: Consume datasets directly from the Hub with `StreamingLeRobotDataset`.
|
||||
- **Lower file-system pressure**: Fewer, larger files ⇒ faster initialization and fewer issues at scale.
|
||||
- **Unified organization**: Clean directory layout with consistent path templates across data and videos.
|
||||
|
||||
## Installation
|
||||
|
||||
`LeRobotDataset v3.0` will be included in `lerobot >= 0.4.0`.
|
||||
|
||||
Until that stable release, you can use the main branch by following the [build from source instructions](./installation#from-source).
|
||||
|
||||
## Record a dataset
|
||||
|
||||
Run the command below to record a dataset with the SO-101 and push to the Hub:
|
||||
|
||||
```bash
|
||||
lerobot-record \
|
||||
--robot.type=so101_follower \
|
||||
--robot.port=/dev/tty.usbmodem585A0076841 \
|
||||
--robot.id=my_awesome_follower_arm \
|
||||
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 1920, height: 1080, fps: 30}}" \
|
||||
--teleop.type=so101_leader \
|
||||
--teleop.port=/dev/tty.usbmodem58760431551 \
|
||||
--teleop.id=my_awesome_leader_arm \
|
||||
--display_data=true \
|
||||
--dataset.repo_id=${HF_USER}/record-test \
|
||||
--dataset.num_episodes=5 \
|
||||
--dataset.single_task="Grab the black cube"
|
||||
```
|
||||
|
||||
See the [recording guide](./il_robots#record-a-dataset) for more details.
|
||||
|
||||
## Format design
|
||||
|
||||
A core v3 principle is **decoupling storage from the user API**: data is stored efficiently (few large files), while the public API exposes intuitive episode-level access.
|
||||
|
||||
`v3` has three pillars:
|
||||
|
||||
1. **Tabular data**: Low‑dimensional, high‑frequency signals (states, actions, timestamps) stored in **Apache Parquet**. Access is memory‑mapped or streamed via the `datasets` stack.
|
||||
2. **Visual data**: Camera frames concatenated and encoded into **MP4**. Frames from the same episode are grouped; videos are sharded per camera for practical sizes.
|
||||
3. **Metadata**: JSON/Parquet records describing schema (feature names, dtypes, shapes), frame rates, normalization stats, and **episode segmentation** (start/end offsets into shared Parquet/MP4 files).
|
||||
|
||||
> To scale to millions of episodes, tabular rows and video frames from multiple episodes are **concatenated** into larger files. Episode‑specific views are reconstructed **via metadata**, not file boundaries.
|
||||
|
||||
<div style="display:flex; justify-content:center; gap:12px; flex-wrap:wrap;">
|
||||
<figure style="margin:0; text-align:center;">
|
||||
<img
|
||||
src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/lerobotdataset-v3/asset1datasetv3.png"
|
||||
alt="LeRobotDataset v3 diagram"
|
||||
width="220"
|
||||
/>
|
||||
<figcaption style="font-size:0.9em; color:#666;">
|
||||
From episode‑based to file‑based datasets
|
||||
</figcaption>
|
||||
</figure>
|
||||
</div>
|
||||
|
||||
### Directory layout (simplified)
|
||||
|
||||
- **`meta/info.json`**: canonical schema (features, shapes/dtypes), FPS, codebase version, and **path templates** to locate data/video shards.
|
||||
- **`meta/stats.json`**: global feature statistics (mean/std/min/max) used for normalization; exposed as `dataset.meta.stats`.
|
||||
- **`meta/tasks.jsonl`**: natural‑language task descriptions mapped to integer IDs for task‑conditioned policies.
|
||||
- **`meta/episodes/`**: per‑episode records (lengths, tasks, offsets) stored as **chunked Parquet** for scalability.
|
||||
- **`data/`**: frame‑by‑frame **Parquet** shards; each file typically contains **many episodes**.
|
||||
- **`videos/`**: **MP4** shards per camera; each file typically contains **many episodes**.
|
||||
|
||||
## Load a dataset for training
|
||||
|
||||
`LeRobotDataset` returns Python dictionaries of PyTorch tensors and integrates with `torch.utils.data.DataLoader`. Here is a code example showing its use:
|
||||
|
||||
```python
|
||||
import torch
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
|
||||
repo_id = "yaak-ai/L2D-v3"
|
||||
|
||||
# 1) Load from the Hub (cached locally)
|
||||
dataset = LeRobotDataset(repo_id)
|
||||
|
||||
# 2) Random access by index
|
||||
sample = dataset[100]
|
||||
print(sample)
|
||||
# {
|
||||
# 'observation.state': tensor([...]),
|
||||
# 'action': tensor([...]),
|
||||
# 'observation.images.front_left': tensor([C, H, W]),
|
||||
# 'timestamp': tensor(1.234),
|
||||
# ...
|
||||
# }
|
||||
|
||||
# 3) Temporal windows via delta_timestamps (seconds relative to t)
|
||||
delta_timestamps = {
|
||||
"observation.images.front_left": [-0.2, -0.1, 0.0] # 0.2s and 0.1s before current frame
|
||||
}
|
||||
|
||||
dataset = LeRobotDataset(repo_id, delta_timestamps=delta_timestamps)
|
||||
|
||||
# Accessing an index now returns a stack for the specified key(s)
|
||||
sample = dataset[100]
|
||||
print(sample["observation.images.front_left"].shape) # [T, C, H, W], where T=3
|
||||
|
||||
# 4) Wrap with a DataLoader for training
|
||||
batch_size = 16
|
||||
data_loader = torch.utils.data.DataLoader(dataset, batch_size=batch_size)
|
||||
|
||||
device = "cuda" if torch.cuda.is_available() else "cpu"
|
||||
for batch in data_loader:
|
||||
observations = batch["observation.state"].to(device)
|
||||
actions = batch["action"].to(device)
|
||||
images = batch["observation.images.front_left"].to(device)
|
||||
# model.forward(batch)
|
||||
```
|
||||
|
||||
## Stream a dataset (no downloads)
|
||||
|
||||
Use `StreamingLeRobotDataset` to iterate directly from the Hub without local copies. This allows to stream large datasets without the need to downloading them onto disk or loading them onto memory, and is a key feature of the new dataset format.
|
||||
|
||||
```python
|
||||
from lerobot.datasets.streaming_dataset import StreamingLeRobotDataset
|
||||
|
||||
repo_id = "yaak-ai/L2D-v3"
|
||||
dataset = StreamingLeRobotDataset(repo_id) # streams directly from the Hub
|
||||
```
|
||||
|
||||
<div style="display:flex; justify-content:center; gap:12px; flex-wrap:wrap;">
|
||||
<figure style="margin:0; text-align:center;">
|
||||
<img
|
||||
src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/lerobotdataset-v3/streaming-lerobot.png"
|
||||
alt="StreamingLeRobotDataset"
|
||||
width="520"
|
||||
/>
|
||||
<figcaption style="font-size:0.9em; color:#666;">
|
||||
Stream directly from the Hub for on‑the‑fly training.
|
||||
</figcaption>
|
||||
</figure>
|
||||
</div>
|
||||
|
||||
## Image transforms
|
||||
|
||||
Image transforms are data augmentations applied to camera frames during training to improve model robustness and generalization. LeRobot supports various transforms including brightness, contrast, saturation, hue, and sharpness adjustments.
|
||||
|
||||
### Using transforms during dataset creation/recording
|
||||
|
||||
Currently, transforms are applied during **training time only**, not during recording. When you create or record a dataset, the raw images are stored without transforms. This allows you to experiment with different augmentations later without re-recording data.
|
||||
|
||||
### Adding transforms to existing datasets (API)
|
||||
|
||||
Use the `image_transforms` parameter when loading a dataset for training:
|
||||
|
||||
```python
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
from lerobot.datasets.transforms import ImageTransforms, ImageTransformsConfig, ImageTransformConfig
|
||||
|
||||
# Option 1: Use default transform configuration (disabled by default)
|
||||
transforms_config = ImageTransformsConfig(
|
||||
enable=True, # Enable transforms
|
||||
max_num_transforms=3, # Apply up to 3 transforms per frame
|
||||
random_order=False, # Apply in standard order
|
||||
)
|
||||
transforms = ImageTransforms(transforms_config)
|
||||
|
||||
dataset = LeRobotDataset(
|
||||
repo_id="your-username/your-dataset",
|
||||
image_transforms=transforms
|
||||
)
|
||||
|
||||
# Option 2: Create custom transform configuration
|
||||
custom_transforms_config = ImageTransformsConfig(
|
||||
enable=True,
|
||||
max_num_transforms=2,
|
||||
random_order=True,
|
||||
tfs={
|
||||
"brightness": ImageTransformConfig(
|
||||
weight=1.0,
|
||||
type="ColorJitter",
|
||||
kwargs={"brightness": (0.7, 1.3)} # Adjust brightness range
|
||||
),
|
||||
"contrast": ImageTransformConfig(
|
||||
weight=2.0, # Higher weight = more likely to be selected
|
||||
type="ColorJitter",
|
||||
kwargs={"contrast": (0.8, 1.2)}
|
||||
),
|
||||
"sharpness": ImageTransformConfig(
|
||||
weight=0.5, # Lower weight = less likely to be selected
|
||||
type="SharpnessJitter",
|
||||
kwargs={"sharpness": (0.3, 2.0)}
|
||||
),
|
||||
}
|
||||
)
|
||||
|
||||
dataset = LeRobotDataset(
|
||||
repo_id="your-username/your-dataset",
|
||||
image_transforms=ImageTransforms(custom_transforms_config)
|
||||
)
|
||||
|
||||
# Option 3: Use pure torchvision transforms
|
||||
from torchvision.transforms import v2
|
||||
|
||||
torchvision_transforms = v2.Compose([
|
||||
v2.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2, hue=0.1),
|
||||
v2.GaussianBlur(kernel_size=3, sigma=(0.1, 2.0)),
|
||||
])
|
||||
|
||||
dataset = LeRobotDataset(
|
||||
repo_id="your-username/your-dataset",
|
||||
image_transforms=torchvision_transforms
|
||||
)
|
||||
```
|
||||
|
||||
### Available transform types
|
||||
|
||||
LeRobot provides several transform types:
|
||||
|
||||
- **`ColorJitter`**: Adjusts brightness, contrast, saturation, and hue
|
||||
- **`SharpnessJitter`**: Randomly adjusts image sharpness
|
||||
- **`Identity`**: No transformation (useful for testing)
|
||||
|
||||
You can also use any `torchvision.transforms.v2` transform by passing it directly to the `image_transforms` parameter.
|
||||
|
||||
### Configuration options
|
||||
|
||||
- **`enable`**: Enable/disable transforms (default: `False`)
|
||||
- **`max_num_transforms`**: Maximum number of transforms applied per frame (default: `3`)
|
||||
- **`random_order`**: Apply transforms in random order vs. standard order (default: `False`)
|
||||
- **`weight`**: Sampling probability for each transform (higher = more likely, if sum of weights is not 1, they will be normalized)
|
||||
- **`kwargs`**: Transform-specific parameters (e.g., brightness range)
|
||||
|
||||
### Visualizing transforms
|
||||
|
||||
Use the visualization script to preview how transforms affect your data:
|
||||
|
||||
```bash
|
||||
lerobot-imgtransform-viz \
|
||||
--repo-id=your-username/your-dataset \
|
||||
--output-dir=./transform_examples \
|
||||
--n-examples=5
|
||||
```
|
||||
|
||||
This saves example images showing the effect of each transform, helping you tune parameters.
|
||||
|
||||
### Best practices
|
||||
|
||||
- **Start conservative**: Begin with small ranges (e.g., brightness 0.9-1.1) and increase gradually
|
||||
- **Test first**: Use the visualization script to ensure transforms look reasonable
|
||||
- **Monitor training**: Strong augmentations can hurt performance if too aggressive
|
||||
- **Match your domain**: If your robot operates in varying lighting, use brightness/contrast transforms
|
||||
- **Combine wisely**: Using too many transforms simultaneously can make training unstable
|
||||
|
||||
## Migrate `v2.1` → `v3.0`
|
||||
|
||||
A converter aggregates per‑episode files into larger shards and writes episode offsets/metadata. Convert your dataset using the instructions below.
|
||||
|
||||
```bash
|
||||
# Pre-release build with v3 support:
|
||||
pip install "https://github.com/huggingface/lerobot/archive/33cad37054c2b594ceba57463e8f11ee374fa93c.zip"
|
||||
|
||||
# Convert an existing v2.1 dataset hosted on the Hub:
|
||||
python -m lerobot.datasets.v30.convert_dataset_v21_to_v30 --repo-id=<HF_USER/DATASET_ID>
|
||||
```
|
||||
|
||||
**What it does**
|
||||
|
||||
- Aggregates parquet files: `episode-0000.parquet`, `episode-0001.parquet`, … → **`file-0000.parquet`**, …
|
||||
- Aggregates mp4 files: `episode-0000.mp4`, `episode-0001.mp4`, … → **`file-0000.mp4`**, …
|
||||
- Updates `meta/episodes/*` (chunked Parquet) with per‑episode lengths, tasks, and byte/frame offsets.
|
||||
@@ -0,0 +1,126 @@
|
||||
# LIBERO
|
||||
|
||||
**LIBERO** is a benchmark designed to study **lifelong robot learning**. The idea is that robots won’t just be pretrained once in a factory, they’ll need to keep learning and adapting with their human users over time. This ongoing adaptation is called **lifelong learning in decision making (LLDM)**, and it’s a key step toward building robots that become truly personalized helpers.
|
||||
|
||||
- 📄 [LIBERO paper](https://arxiv.org/abs/2306.03310)
|
||||
- 💻 [Original LIBERO repo](https://github.com/Lifelong-Robot-Learning/LIBERO)
|
||||
|
||||
To make progress on this challenge, LIBERO provides a set of standardized tasks that focus on **knowledge transfer**: how well a robot can apply what it has already learned to new situations. By evaluating on LIBERO, different algorithms can be compared fairly and researchers can build on each other’s work.
|
||||
|
||||
LIBERO includes **five task suites**:
|
||||
|
||||
- **LIBERO-Spatial (`libero_spatial`)** – tasks that require reasoning about spatial relations.
|
||||
- **LIBERO-Object (`libero_object`)** – tasks centered on manipulating different objects.
|
||||
- **LIBERO-Goal (`libero_goal`)** – goal-conditioned tasks where the robot must adapt to changing targets.
|
||||
- **LIBERO-90 (`libero_90`)** – 90 short-horizon tasks from the LIBERO-100 collection.
|
||||
- **LIBERO-Long (`libero_10`)** – 10 long-horizon tasks from the LIBERO-100 collection.
|
||||
|
||||
Together, these suites cover **130 tasks**, ranging from simple object manipulations to complex multi-step scenarios. LIBERO is meant to grow over time, and to serve as a shared benchmark where the community can test and improve lifelong learning algorithms.
|
||||
|
||||
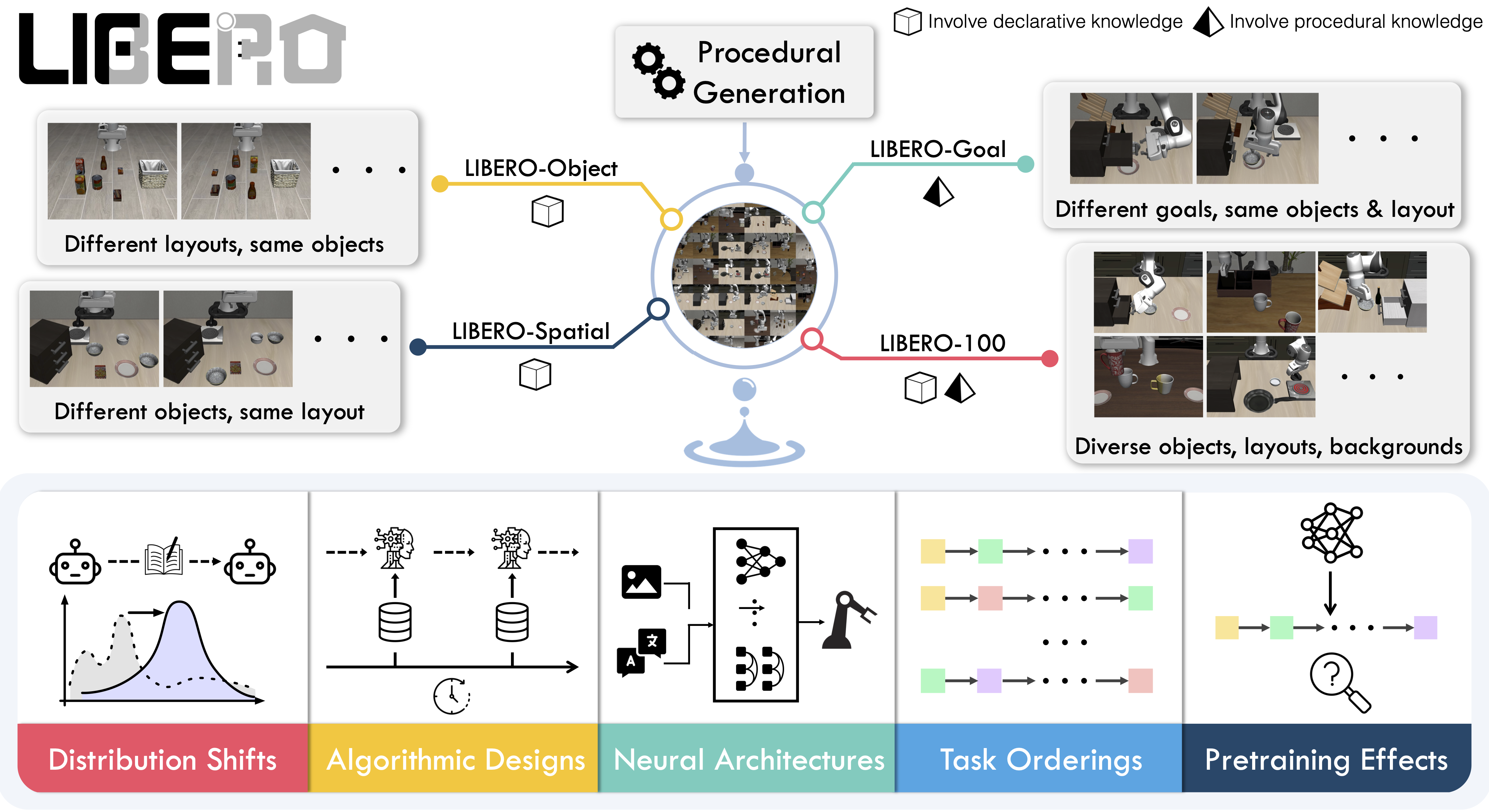
|
||||
|
||||
## Evaluating with LIBERO
|
||||
|
||||
At **LeRobot**, we ported [LIBERO](https://github.com/Lifelong-Robot-Learning/LIBERO) into our framework and used it mainly to **evaluate [SmolVLA](https://huggingface.co/docs/lerobot/en/smolvla)**, our lightweight Vision-Language-Action model.
|
||||
|
||||
LIBERO is now part of our **multi-eval supported simulation**, meaning you can benchmark your policies either on a **single suite of tasks** or across **multiple suites at once** with just a flag.
|
||||
|
||||
To Install LIBERO, after following LeRobot official instructions, just do:
|
||||
`pip install -e ".[libero]"`
|
||||
|
||||
### Single-suite evaluation
|
||||
|
||||
Evaluate a policy on one LIBERO suite:
|
||||
|
||||
```bash
|
||||
python src/lerobot/scripts/eval.py \
|
||||
--policy.path="your-policy-id" \
|
||||
--env.type=libero \
|
||||
--env.task=libero_object \
|
||||
--eval.batch_size=2 \
|
||||
--eval.n_episodes=3
|
||||
```
|
||||
|
||||
- `--env.task` picks the suite (`libero_object`, `libero_spatial`, etc.).
|
||||
- `--eval.batch_size` controls how many environments run in parallel.
|
||||
- `--eval.n_episodes` sets how many episodes to run in total.
|
||||
|
||||
---
|
||||
|
||||
### Multi-suite evaluation
|
||||
|
||||
Benchmark a policy across multiple suites at once:
|
||||
|
||||
```bash
|
||||
python src/lerobot/scripts/eval.py \
|
||||
--policy.path="your-policy-id" \
|
||||
--env.type=libero \
|
||||
--env.task=libero_object,libero_spatial \
|
||||
--eval.batch_size=1 \
|
||||
--eval.n_episodes=2
|
||||
```
|
||||
|
||||
- Pass a comma-separated list to `--env.task` for multi-suite evaluation.
|
||||
|
||||
### Policy inputs and outputs
|
||||
|
||||
When using LIBERO through LeRobot, policies interact with the environment via **observations** and **actions**:
|
||||
|
||||
- **Observations**
|
||||
- `observation.state` – proprioceptive features (agent state).
|
||||
- `observation.images.image` – main camera view (`agentview_image`).
|
||||
- `observation.images.image2` – wrist camera view (`robot0_eye_in_hand_image`).
|
||||
|
||||
⚠️ **Note:** LeRobot enforces the `.images.*` prefix for any multi-modal visual features. Always ensure that your policy config `input_features` use the same naming keys, and that your dataset metadata keys follow this convention during evaluation.
|
||||
If your data contains different keys, you must rename the observations to match what the policy expects, since naming keys are encoded inside the normalization statistics layer.
|
||||
This will be fixed with the upcoming Pipeline PR.
|
||||
|
||||
- **Actions**
|
||||
- Continuous control values in a `Box(-1, 1, shape=(7,))` space.
|
||||
|
||||
We also provide a notebook for quick testing:
|
||||
Training with LIBERO
|
||||
|
||||
## Training with LIBERO
|
||||
|
||||
When training on LIBERO tasks, make sure your dataset parquet and metadata keys follow the LeRobot convention.
|
||||
|
||||
The environment expects:
|
||||
|
||||
- `observation.state` → 8-dim agent state
|
||||
- `observation.images.image` → main camera (`agentview_image`)
|
||||
- `observation.images.image2` → wrist camera (`robot0_eye_in_hand_image`)
|
||||
|
||||
⚠️ Cleaning the dataset upfront is **cleaner and more efficient** than remapping keys inside the code.
|
||||
To avoid potential mismatches and key errors, we provide a **preprocessed LIBERO dataset** that is fully compatible with the current LeRobot codebase and requires no additional manipulation:
|
||||
👉 [HuggingFaceVLA/libero](https://huggingface.co/datasets/HuggingFaceVLA/libero)
|
||||
|
||||
For reference, here is the **original dataset** published by Physical Intelligence:
|
||||
👉 [physical-intelligence/libero](https://huggingface.co/datasets/physical-intelligence/libero)
|
||||
|
||||
---
|
||||
|
||||
### Example training command
|
||||
|
||||
```bash
|
||||
python src/lerobot/scripts/train.py \
|
||||
--policy.type=smolvla \
|
||||
--policy.repo_id=${HF_USER}/libero-test \
|
||||
--dataset.repo_id=jadechoghari/smol-libero3 \
|
||||
--env.type=libero \
|
||||
--env.task=libero_10 \
|
||||
--output_dir=./outputs/ \
|
||||
--steps=100000 \
|
||||
--batch_size=4 \
|
||||
--eval.batch_size=1 \
|
||||
--eval.n_episodes=1 \
|
||||
--eval_freq=1000 \
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
### Note on rendering
|
||||
|
||||
LeRobot uses MuJoCo for simulation. You need to set the rendering backend before training or evaluation:
|
||||
|
||||
- `export MUJOCO_GL=egl` → for headless servers (e.g. HPC, cloud)
|
||||
@@ -0,0 +1,192 @@
|
||||
# Phone
|
||||
|
||||
Use your phone (iOS or Android) to control your robot.
|
||||
|
||||
**In this guide you'll learn:**
|
||||
|
||||
- How to connect an iOS/Android phone
|
||||
- How phone pose is mapped to robot end‑effector (EE) targets
|
||||
- How to tweak safety limits, gripper control, and IK settings
|
||||
|
||||
To use phone to control your robot, install the relevant dependencies with:
|
||||
|
||||
```bash
|
||||
pip install lerobot[phone]
|
||||
```
|
||||
|
||||
## Get started
|
||||
|
||||
### Supported platforms
|
||||
|
||||
- iOS: Uses the HEBI Mobile I/O app (ARKit pose + buttons). Download the app first, open it and the examples will discover it on your network and stream the phone pose and inputs.
|
||||
- Android: Uses the `teleop` package (WebXR). When you start the Python process, it prints a local URL. Open the link on your phone, tap Start, then use Move to stream pose.
|
||||
|
||||
Links:
|
||||
|
||||
- Android WebXR library: [`teleop` on PyPI](https://pypi.org/project/teleop/)
|
||||
- iOS app: [HEBI Mobile I/O](https://docs.hebi.us/tools.html#mobile-io)
|
||||
|
||||
### Phone orientation and controls
|
||||
|
||||
- Orientation: hold the phone with the screen facing up and the top edge pointing in the same direction as the robot gripper. This ensures calibration aligns the phone’s frame with the robot frame so motion feels natural, see the image below for reference.
|
||||
- Enable/disable:
|
||||
- iOS: Hold `B1` to enable teleoperation, release to stop. The first press captures a reference pose.
|
||||
- Android: Press and hold the `Move` button, release to stop. The first press captures a reference pose.
|
||||
- Gripper control:
|
||||
- iOS: Analog input `A3` controls the gripper as velocity input.
|
||||
- Android: Buttons `A` and `B` act like increment/decrement (A opens, B closes). You can tune velocity in the `GripperVelocityToJoint` step.
|
||||
|
||||
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/lerobot/phone_teleop.webp" alt="Phone teleop orientation" title="Phone teleop orientation" width="40%">
|
||||
|
||||
### Step 1: Choose the platform
|
||||
|
||||
Modify the examples to use `PhoneOS.IOS` or `PhoneOS.ANDROID` in `PhoneConfig`. The API is identical across platforms, only the input source differs. All examples are under `examples/` and have `phone_so100_*.py` variants.
|
||||
|
||||
Teleoperation example:
|
||||
|
||||
```36:43:examples/phone_so100_teleop.py
|
||||
from lerobot.teleoperators.phone.config_phone import PhoneConfig, PhoneOS
|
||||
|
||||
teleop_config = PhoneConfig(phone_os=PhoneOS.IOS) # or PhoneOS.ANDROID
|
||||
teleop_device = Phone(teleop_config)
|
||||
```
|
||||
|
||||
### Step 2: Connect and calibrate
|
||||
|
||||
When `Phone(teleop_config)` is created and `connect()` is called, calibration is prompted automatically. Hold the phone in the orientation described above, then:
|
||||
|
||||
- iOS: press and hold `B1` to capture the reference pose.
|
||||
- Android: press `Move` button on the WebXR page to capture the reference pose.
|
||||
|
||||
Why calibrate? We capture the current pose so subsequent poses are expressed in a robot aligned frame. When you again press the button to enable control, the position is recaptured to avoid drift when your phone is repositioned while it was disabled.
|
||||
|
||||
### Step 3: Run an example
|
||||
|
||||
Run on of the examples scripts to teleoperate, record a dataset, replay a dataset or evaluate a policy.
|
||||
|
||||
All scripts assume you configured your robot (e.g., SO-100 follower) and set the correct serial port.
|
||||
|
||||
Additionally you need to **copy the urdf of the robot to the examples folder**. For the examples in this tutorial (Using SO100/SO101) it is highly recommended to use the urdf in the [SO-ARM100 repo](https://github.com/TheRobotStudio/SO-ARM100/blob/main/Simulation/SO101/so101_new_calib.urdf)
|
||||
|
||||
- Run this example to teleoperate:
|
||||
|
||||
```bash
|
||||
python examples/phone_to_so100/teleoperate.py
|
||||
```
|
||||
|
||||
After running the example:
|
||||
|
||||
- Android: after starting the script, open the printed local URL on your phone, tap Start, then press and hold Move.
|
||||
- iOS: open HEBI Mobile I/O first; B1 enables motion. A3 controls the gripper.
|
||||
|
||||
Additionally you can customize mapping or safety limits by editing the processor steps shown in the examples. You can also remap inputs (e.g., use a different analog input) or adapt the pipeline to other robots (e.g., LeKiwi) by modifying the input and kinematics steps. More about this in the [Processors for Robots and Teleoperators](./processors_robots_teleop.mdx) guide.
|
||||
|
||||
- Run this example to record a dataset, which saves absolute end effector observations and actions:
|
||||
|
||||
```bash
|
||||
python examples/phone_to_so100/record.py
|
||||
```
|
||||
|
||||
- Run this example to replay recorded episodes:
|
||||
|
||||
```bash
|
||||
python examples/phone_to_so100/replay.py
|
||||
```
|
||||
|
||||
- Run this example to evaluate a pretrained policy:
|
||||
|
||||
```bash
|
||||
python examples/phone_to_so100/evaluate.py
|
||||
```
|
||||
|
||||
### Important pipeline steps and options
|
||||
|
||||
- Kinematics are used in multiple steps. We use [Placo](https://github.com/Rhoban/placo) which is a wrapper around Pinocchio for handling our kinematics. We construct the kinematics object by passing the robot's URDF and target frame. We set `target_frame_name` to the gripper frame.
|
||||
|
||||
```examples/phone_to_so100/teleoperate.py
|
||||
kinematics_solver = RobotKinematics(
|
||||
urdf_path="./SO101/so101_new_calib.urdf",
|
||||
target_frame_name="gripper_frame_link",
|
||||
joint_names=list(robot.bus.motors.keys()),
|
||||
)
|
||||
|
||||
```
|
||||
|
||||
- The `MapPhoneActionToRobotAction` step converts the calibrated phone pose and inputs into target deltas and gripper commands, below is shown what the step outputs.
|
||||
|
||||
```src/lerobot/teleoperators/phone/phone_processor.py
|
||||
action["enabled"] = enabled
|
||||
action["target_x"] = -pos[1] if enabled else 0.0
|
||||
action["target_y"] = pos[0] if enabled else 0.0
|
||||
action["target_z"] = pos[2] if enabled else 0.0
|
||||
action["target_wx"] = rotvec[1] if enabled else 0.0
|
||||
action["target_wy"] = rotvec[0] if enabled else 0.0
|
||||
action["target_wz"] = -rotvec[2] if enabled else 0.0
|
||||
action["gripper_vel"] = gripper_vel # Still send gripper action when disabled
|
||||
```
|
||||
|
||||
- The `EEReferenceAndDelta` step converts target deltas to an absolute desired EE pose, storing a reference on enable, the `end_effector_step_sizes` are the step sizes for the EE pose and can be modified to change the motion speed.
|
||||
|
||||
```examples/phone_to_so100/teleoperate.py
|
||||
EEReferenceAndDelta(
|
||||
kinematics=kinematics_solver,
|
||||
end_effector_step_sizes={"x": 0.5, "y": 0.5, "z": 0.5},
|
||||
motor_names=list(robot.bus.motors.keys()),
|
||||
use_latched_reference=True,
|
||||
),
|
||||
```
|
||||
|
||||
- The `EEBoundsAndSafety` step clamps EE motion to a workspace and checks for large ee step jumps to ensure safety. The `end_effector_bounds` are the bounds for the EE pose and can be modified to change the workspace. The `max_ee_step_m` and `max_ee_twist_step_rad` are the step limits for the EE pose and can be modified to change the safety limits.
|
||||
|
||||
```examples/phone_to_so100/teleoperate.py
|
||||
EEBoundsAndSafety(
|
||||
end_effector_bounds={"min": [-1.0, -1.0, -1.0], "max": [1.0, 1.0, 1.0]},
|
||||
max_ee_step_m=0.10,
|
||||
max_ee_twist_step_rad=0.50,
|
||||
)
|
||||
```
|
||||
|
||||
- The `GripperVelocityToJoint` step turns a velocity‑like gripper input into absolute gripper position using the current measured state. The `speed_factor` is the factor by which the velocity is multiplied.
|
||||
|
||||
```examples/phone_to_so100/teleoperate.py
|
||||
GripperVelocityToJoint(speed_factor=20.0)
|
||||
```
|
||||
|
||||
#### Different IK initial guesses
|
||||
|
||||
We use different IK initial guesses in the kinematic steps. As initial guess either the current measured joints or the previous IK solution is used.
|
||||
|
||||
- Closed loop (used in record/eval): sets `initial_guess_current_joints=True` so IK starts from the measured joints each frame.
|
||||
|
||||
```examples/phone_to_so100/record.py
|
||||
InverseKinematicsEEToJoints(
|
||||
kinematics=kinematics_solver,
|
||||
motor_names=list(robot.bus.motors.keys()),
|
||||
initial_guess_current_joints=True, # closed loop
|
||||
)
|
||||
```
|
||||
|
||||
- Open loop (used in replay): sets `initial_guess_current_joints=False` so IK continues from the previous IK solution rather than the measured state. This preserves action stability when we replay without feedback.
|
||||
|
||||
```examples/phone_to_so100/replay.py
|
||||
InverseKinematicsEEToJoints(
|
||||
kinematics=kinematics_solver,
|
||||
motor_names=list(robot.bus.motors.keys()),
|
||||
initial_guess_current_joints=False, # open loop
|
||||
)
|
||||
```
|
||||
|
||||
### Pipeline steps explained
|
||||
|
||||
- MapPhoneActionToRobotAction: converts calibrated phone pose and inputs into target deltas and a gripper command. Motion is gated by an enable signal (B1 on iOS, Move on Android).
|
||||
- EEReferenceAndDelta: latches a reference EE pose on enable and combines it with target deltas to produce an absolute desired EE pose each frame. When disabled, it keeps sending the last commanded pose.
|
||||
- EEBoundsAndSafety: clamps the EE pose to a workspace and rate‑limits jumps for safety. Also declares `action.ee.*` features.
|
||||
- InverseKinematicsEEToJoints: turns an EE pose into joint positions with IK. `initial_guess_current_joints=True` is recommended for closed‑loop control; set `False` for open‑loop replay for stability.
|
||||
- GripperVelocityToJoint: integrates a velocity‑like gripper input into an absolute gripper position using the current measured state.
|
||||
- ForwardKinematicsJointsToEE: computes `observation.state.ee.*` from observed joints for logging and training on EE state.
|
||||
|
||||
### Troubleshooting
|
||||
|
||||
- iOS not discovered: ensure HEBI Mobile I/O is open and your laptop/phone are on the same network.
|
||||
- Android URL not reachable: check local you used `https` instead of `http`, use the exact IP printed by the script and allow your browser to enter and ignore the certificate issue.
|
||||
- Motion feels inverted: adjust the sign flips in `MapPhoneActionToRobotAction` or swap axes to match your setup.
|
||||
@@ -0,0 +1,321 @@
|
||||
# Porting Large Datasets to LeRobot Dataset v3.0
|
||||
|
||||
This tutorial explains how to port large-scale robotic datasets to the LeRobot Dataset v3.0 format. We'll use the **DROID 1.0.1** dataset as our primary example, which demonstrates handling multi-terabyte datasets with thousands of shards across SLURM clusters.
|
||||
|
||||
## File Organization: v2.1 vs v3.0
|
||||
|
||||
Dataset v3.0 fundamentally changes how data is organized and stored:
|
||||
|
||||
**v2.1 Structure (Episode-based)**:
|
||||
|
||||
```
|
||||
dataset/
|
||||
├── data/chunk-000/episode_000000.parquet
|
||||
├── data/chunk-000/episode_000001.parquet
|
||||
├── videos/chunk-000/camera/episode_000000.mp4
|
||||
└── meta/episodes.jsonl
|
||||
```
|
||||
|
||||
**v3.0 Structure (File-based)**:
|
||||
|
||||
```
|
||||
dataset/
|
||||
├── data/chunk-000/file-000.parquet # Multiple episodes per file
|
||||
├── videos/camera/chunk-000/file-000.mp4 # Consolidated video chunks
|
||||
└── meta/episodes/chunk-000/file-000.parquet # Structured metadata
|
||||
```
|
||||
|
||||
This transition from individual episode files to file-based chunks dramatically improves performance and reduces storage overhead.
|
||||
|
||||
## What's New in Dataset v3.0
|
||||
|
||||
Dataset v3.0 introduces significant improvements for handling large datasets:
|
||||
|
||||
### 🏗️ **Enhanced File Organization**
|
||||
|
||||
- **File-based structure**: Episodes are now grouped into chunked files rather than individual episode files
|
||||
- **Configurable file sizes**: for data and video files
|
||||
- **Improved storage efficiency**: Better compression and reduced overhead
|
||||
|
||||
### 📊 **Modern Metadata Management**
|
||||
|
||||
- **Parquet-based metadata**: Replaced JSON Lines with efficient parquet format
|
||||
- **Structured episode access**: Direct pandas DataFrame access via `dataset.meta.episodes`
|
||||
- **Per-episode statistics**: Enhanced statistics tracking at episode level
|
||||
|
||||
### 🚀 **Performance Enhancements**
|
||||
|
||||
- **Memory-mapped access**: Improved RAM usage through PyArrow memory mapping
|
||||
- **Faster loading**: Significantly reduced dataset initialization time
|
||||
- **Better scalability**: Designed for datasets with millions of episodes
|
||||
|
||||
## Prerequisites
|
||||
|
||||
Before porting large datasets, ensure you have:
|
||||
|
||||
- **LeRobot installed** with v3.0 support. Follow our [Installation Guide](./installation).
|
||||
- **Sufficient storage**: Raw datasets can be very large (e.g., DROID requires 2TB)
|
||||
- **Cluster access** (recommended for large datasets): SLURM or similar job scheduler
|
||||
- **Dataset-specific dependencies**: For DROID, you'll need TensorFlow Dataset utilities
|
||||
|
||||
## Understanding the DROID Dataset
|
||||
|
||||
[DROID 1.0.1](https://droid-dataset.github.io/droid/the-droid-dataset) is an excellent example of a large-scale robotic dataset:
|
||||
|
||||
- **Size**: 1.7TB (RLDS format), 8.7TB (raw data)
|
||||
- **Structure**: 2048 pre-defined TensorFlow dataset shards
|
||||
- **Content**: 76,000+ robot manipulation trajectories from Franka Emika Panda robots
|
||||
- **Scope**: Real-world manipulation tasks across multiple environments and objects
|
||||
- **Format**: Originally in TensorFlow Records/RLDS format, requiring conversion to LeRobot format
|
||||
- **Hosting**: Google Cloud Storage with public access via `gsutil`
|
||||
|
||||
The dataset contains diverse manipulation demonstrations with:
|
||||
|
||||
- Multiple camera views (wrist camera, exterior cameras)
|
||||
- Natural language task descriptions
|
||||
- Robot proprioceptive state and actions
|
||||
- Success/failure annotations
|
||||
|
||||
### DROID Features Schema
|
||||
|
||||
```python
|
||||
DROID_FEATURES = {
|
||||
# Episode markers
|
||||
"is_first": {"dtype": "bool", "shape": (1,)},
|
||||
"is_last": {"dtype": "bool", "shape": (1,)},
|
||||
"is_terminal": {"dtype": "bool", "shape": (1,)},
|
||||
|
||||
# Language instructions
|
||||
"language_instruction": {"dtype": "string", "shape": (1,)},
|
||||
"language_instruction_2": {"dtype": "string", "shape": (1,)},
|
||||
"language_instruction_3": {"dtype": "string", "shape": (1,)},
|
||||
|
||||
# Robot state
|
||||
"observation.state.gripper_position": {"dtype": "float32", "shape": (1,)},
|
||||
"observation.state.cartesian_position": {"dtype": "float32", "shape": (6,)},
|
||||
"observation.state.joint_position": {"dtype": "float32", "shape": (7,)},
|
||||
|
||||
# Camera observations
|
||||
"observation.images.wrist_left": {"dtype": "image"},
|
||||
"observation.images.exterior_1_left": {"dtype": "image"},
|
||||
"observation.images.exterior_2_left": {"dtype": "image"},
|
||||
|
||||
# Actions
|
||||
"action.gripper_position": {"dtype": "float32", "shape": (1,)},
|
||||
"action.cartesian_position": {"dtype": "float32", "shape": (6,)},
|
||||
"action.joint_position": {"dtype": "float32", "shape": (7,)},
|
||||
|
||||
# Standard LeRobot format
|
||||
"observation.state": {"dtype": "float32", "shape": (8,)}, # joints + gripper
|
||||
"action": {"dtype": "float32", "shape": (8,)}, # joints + gripper
|
||||
}
|
||||
```
|
||||
|
||||
## Approach 1: Single Computer Porting
|
||||
|
||||
### Step 1: Install Dependencies
|
||||
|
||||
For DROID specifically:
|
||||
|
||||
```bash
|
||||
pip install tensorflow
|
||||
pip install tensorflow_datasets
|
||||
```
|
||||
|
||||
For other datasets, install the appropriate readers for your source format.
|
||||
|
||||
### Step 2: Download Raw Data
|
||||
|
||||
Download DROID from Google Cloud Storage using `gsutil`:
|
||||
|
||||
```bash
|
||||
# Install Google Cloud SDK if not already installed
|
||||
# https://cloud.google.com/sdk/docs/install
|
||||
|
||||
# Download the full RLDS dataset (1.7TB)
|
||||
gsutil -m cp -r gs://gresearch/robotics/droid/1.0.1 /your/data/
|
||||
|
||||
# Or download just the 100-episode sample (2GB) for testing
|
||||
gsutil -m cp -r gs://gresearch/robotics/droid_100 /your/data/
|
||||
```
|
||||
|
||||
> [!WARNING]
|
||||
> Large datasets require substantial time and storage:
|
||||
>
|
||||
> - **Full DROID (1.7TB)**: Several days to download depending on bandwidth
|
||||
> - **Processing time**: 7+ days for local porting of full dataset
|
||||
> - **Upload time**: 3+ days to push to Hugging Face Hub
|
||||
> - **Local storage**: ~400GB for processed LeRobot format
|
||||
|
||||
### Step 3: Port the Dataset
|
||||
|
||||
```bash
|
||||
python examples/port_datasets/port_droid.py \
|
||||
--raw-dir /your/data/droid/1.0.1 \
|
||||
--repo-id your_id/droid_1.0.1 \
|
||||
--push-to-hub
|
||||
```
|
||||
|
||||
### Development and Testing
|
||||
|
||||
For development, you can port a single shard:
|
||||
|
||||
```bash
|
||||
python examples/port_datasets/port_droid.py \
|
||||
--raw-dir /your/data/droid/1.0.1 \
|
||||
--repo-id your_id/droid_1.0.1_test \
|
||||
--num-shards 2048 \
|
||||
--shard-index 0
|
||||
```
|
||||
|
||||
This approach works for smaller datasets or testing, but large datasets require cluster computing.
|
||||
|
||||
## Approach 2: SLURM Cluster Porting (Recommended)
|
||||
|
||||
For large datasets like DROID, parallel processing across multiple nodes dramatically reduces processing time.
|
||||
|
||||
### Step 1: Install Cluster Dependencies
|
||||
|
||||
```bash
|
||||
pip install datatrove # Hugging Face's distributed processing library
|
||||
```
|
||||
|
||||
### Step 2: Configure Your SLURM Environment
|
||||
|
||||
Find your partition information:
|
||||
|
||||
```bash
|
||||
sinfo --format="%R" # List available partitions
|
||||
sinfo -N -p your_partition -h -o "%N cpus=%c mem=%m" # Check resources
|
||||
```
|
||||
|
||||
Choose a **CPU partition** - no GPU needed for dataset porting.
|
||||
|
||||
### Step 3: Launch Parallel Porting Jobs
|
||||
|
||||
```bash
|
||||
python examples/port_datasets/slurm_port_shards.py \
|
||||
--raw-dir /your/data/droid/1.0.1 \
|
||||
--repo-id your_id/droid_1.0.1 \
|
||||
--logs-dir /your/logs \
|
||||
--job-name port_droid \
|
||||
--partition your_partition \
|
||||
--workers 2048 \
|
||||
--cpus-per-task 8 \
|
||||
--mem-per-cpu 1950M
|
||||
```
|
||||
|
||||
#### Parameter Guidelines
|
||||
|
||||
- **`--workers`**: Number of parallel jobs (max 2048 for DROID's shard count)
|
||||
- **`--cpus-per-task`**: 8 CPUs recommended for frame encoding parallelization
|
||||
- **`--mem-per-cpu`**: ~16GB total RAM (8×1950M) for loading raw frames
|
||||
|
||||
> [!TIP]
|
||||
> Start with fewer workers (e.g., 100) to test your cluster configuration before launching thousands of jobs.
|
||||
|
||||
### Step 4: Monitor Progress
|
||||
|
||||
Check running jobs:
|
||||
|
||||
```bash
|
||||
squeue -u $USER
|
||||
```
|
||||
|
||||
Monitor overall progress:
|
||||
|
||||
```bash
|
||||
jobs_status /your/logs
|
||||
```
|
||||
|
||||
Inspect individual job logs:
|
||||
|
||||
```bash
|
||||
less /your/logs/port_droid/slurm_jobs/JOB_ID_WORKER_ID.out
|
||||
```
|
||||
|
||||
Debug failed jobs:
|
||||
|
||||
```bash
|
||||
failed_logs /your/logs/port_droid
|
||||
```
|
||||
|
||||
### Step 5: Aggregate Shards
|
||||
|
||||
Once all porting jobs complete:
|
||||
|
||||
```bash
|
||||
python examples/port_datasets/slurm_aggregate_shards.py \
|
||||
--repo-id your_id/droid_1.0.1 \
|
||||
--logs-dir /your/logs \
|
||||
--job-name aggr_droid \
|
||||
--partition your_partition \
|
||||
--workers 2048 \
|
||||
--cpus-per-task 8 \
|
||||
--mem-per-cpu 1950M
|
||||
```
|
||||
|
||||
### Step 6: Upload to Hub
|
||||
|
||||
```bash
|
||||
python examples/port_datasets/slurm_upload.py \
|
||||
--repo-id your_id/droid_1.0.1 \
|
||||
--logs-dir /your/logs \
|
||||
--job-name upload_droid \
|
||||
--partition your_partition \
|
||||
--workers 50 \
|
||||
--cpus-per-task 4 \
|
||||
--mem-per-cpu 1950M
|
||||
```
|
||||
|
||||
> [!NOTE]
|
||||
> Upload uses fewer workers (50) since it's network-bound rather than compute-bound.
|
||||
|
||||
## Dataset v3.0 File Structure
|
||||
|
||||
Your completed dataset will have this modern structure:
|
||||
|
||||
```
|
||||
dataset/
|
||||
├── meta/
|
||||
│ ├── episodes/
|
||||
│ │ └── chunk-000/
|
||||
│ │ └── file-000.parquet # Episode metadata
|
||||
│ ├── tasks.parquet # Task definitions
|
||||
│ ├── stats.json # Aggregated statistics
|
||||
│ └── info.json # Dataset information
|
||||
├── data/
|
||||
│ └── chunk-000/
|
||||
│ └── file-000.parquet # Consolidated episode data
|
||||
└── videos/
|
||||
└── camera_key/
|
||||
└── chunk-000/
|
||||
└── file-000.mp4 # Consolidated video files
|
||||
```
|
||||
|
||||
This replaces the old episode-per-file structure with efficient, optimally-sized chunks.
|
||||
|
||||
## Migrating from Dataset v2.1
|
||||
|
||||
If you have existing datasets in v2.1 format, use the migration tool:
|
||||
|
||||
```bash
|
||||
python src/lerobot/datasets/v30/convert_dataset_v21_to_v30.py \
|
||||
--repo-id your_id/existing_dataset
|
||||
```
|
||||
|
||||
This automatically:
|
||||
|
||||
- Converts file structure to v3.0 format
|
||||
- Migrates metadata from JSON Lines to parquet
|
||||
- Aggregates statistics and creates per-episode stats
|
||||
- Updates version information
|
||||
|
||||
## Performance Benefits
|
||||
|
||||
Dataset v3.0 provides significant improvements for large datasets:
|
||||
|
||||
- **Faster loading**: 3-5x reduction in initialization time
|
||||
- **Memory efficiency**: Better RAM usage through memory mapping
|
||||
- **Scalable processing**: Handles millions of episodes efficiently
|
||||
- **Storage optimization**: Reduced file count and improved compression
|
||||
@@ -0,0 +1,151 @@
|
||||
# Processors for Robots and Teleoperators
|
||||
|
||||
This guide shows how to build and modify processing pipelines that connect teleoperators (e.g., phone) to robots and datasets. Pipelines standardize conversions between different action/observation spaces so you can swap teleops and robots without rewriting glue code.
|
||||
|
||||
We use the Phone to SO‑100 follower examples for concreteness, but the same patterns apply to other robots.
|
||||
|
||||
**What you'll learn**
|
||||
|
||||
- Absolute vs. relative EE control: What each means, trade‑offs, and how to choose for your task.
|
||||
- Three-pipeline pattern: How to map teleop actions → dataset actions → robot commands, and robot observations → dataset observations.
|
||||
- Adapters (`to_transition` / `to_output`): How these convert raw dicts to `EnvTransition` and back to reduce boilerplate.
|
||||
- Dataset feature contracts: How steps declare features via `transform_features(...)`, and how to aggregate/merge them for recording.
|
||||
- Choosing a representation: When to store joints, absolute EE poses, or relative EE deltas—and how that affects training.
|
||||
- Pipeline customization guidance: How to swap robots/URDFs safely and tune bounds, step sizes, and options like IK initialization.
|
||||
|
||||
### Absolute vs relative EE control
|
||||
|
||||
The examples in this guide use absolute end effector (EE) poses because they are easy to reason about. In practice, relative EE deltas or joint position are often preferred as learning features.
|
||||
|
||||
With processors, you choose the learning features you want to use for your policy. This could be joints positions/velocities, absolute EE, or relative EE positions. You can also choose to store other features, such as joint torques, motor currents, etc.
|
||||
|
||||
## Three pipelines
|
||||
|
||||
We often compose three pipelines. Depending on your setup, some can be empty if action and observation spaces already match.
|
||||
Each of these pipelines handle different conversions between different action and observation spaces. Below is a quick explanation of each pipeline.
|
||||
|
||||
1. Pipeline 1: Teleop action space → dataset action space (phone pose → EE targets)
|
||||
2. Pipeline 2: Dataset action space → robot command space (EE targets → joints)
|
||||
3. Pipeline 3: Robot observation space → dataset observation space (joints → EE pose)
|
||||
|
||||
Below is an example of the three pipelines that we use in the phone to SO-100 follower examples:
|
||||
|
||||
```69:90:examples/phone_so100_record.py
|
||||
phone_to_robot_ee_pose_processor = RobotProcessorPipeline[RobotAction, RobotAction]( # teleop -> dataset action
|
||||
steps=[
|
||||
MapPhoneActionToRobotAction(platform=teleop_config.phone_os),
|
||||
EEReferenceAndDelta(
|
||||
kinematics=kinematics_solver, end_effector_step_sizes={"x": 0.5, "y": 0.5, "z": 0.5}, motor_names=list(robot.bus.motors.keys()),
|
||||
),
|
||||
EEBoundsAndSafety(
|
||||
end_effector_bounds={"min": [-1.0, -1.0, -1.0], "max": [1.0, 1.0, 1.0]}, max_ee_step_m=0.20, max_ee_twist_step_rad=0.50,
|
||||
),
|
||||
GripperVelocityToJoint(),
|
||||
],
|
||||
to_transition=robot_action_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
|
||||
robot_ee_to_joints_processor = RobotProcessorPipeline[RobotAction, RobotAction]( # dataset action -> robot
|
||||
steps=[
|
||||
InverseKinematicsEEToJoints(
|
||||
kinematics=kinematics_solver, motor_names=list(robot.bus.motors.keys()), initial_guess_current_joints=True,
|
||||
),
|
||||
],
|
||||
to_transition=robot_action_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
|
||||
robot_joints_to_ee_pose = RobotProcessorPipeline[RobotObservation, RobotObservation]( # robot obs -> dataset obs
|
||||
steps=[
|
||||
ForwardKinematicsJointsToEE(kinematics=kinematics_solver, motor_names=list(robot.bus.motors.keys()))
|
||||
],
|
||||
to_transition=observation_to_transition,
|
||||
to_output=transition_to_observation,
|
||||
)
|
||||
```
|
||||
|
||||
## Why to_transition / to_output
|
||||
|
||||
To convert from robot/teleoperator to pipeline and back, we use the `to_transition` and `to_output` pipeline adapters.
|
||||
They standardize conversions to reduce boilerplate code, and form the bridge between the robot and teleoperators raw dictionaries and the pipeline’s `EnvTransition` format.
|
||||
In the phone to SO-100 follower examples we use the following adapters:
|
||||
|
||||
- `robot_action_to_transition`: transforms the teleop action dict to a pipeline transition.
|
||||
- `transition_to_robot_action`: transforms the pipeline transition to a robot action dict.
|
||||
- `observation_to_transition`: transforms the robot observation dict to a pipeline transition.
|
||||
- `transition_to_observation`: transforms the pipeline transition to a observation dict.
|
||||
|
||||
Checkout [src/lerobot/processor/converters.py](https://github.com/huggingface/lerobot/blob/main/src/lerobot/processor/converters.py) for more details.
|
||||
|
||||
## Dataset feature contracts
|
||||
|
||||
Dataset features are determined by the keys saved in the dataset. Each step can declare what features it modifies in a contract called `transform_features(...)`. Once you build a processor, the processor can then aggregate all of these features with `aggregate_pipeline_dataset_features()` and merge multiple feature dicts with `combine_feature_dicts(...)`.
|
||||
|
||||
Below is and example of how we declare features with the `transform_features` method in the phone to SO-100 follower examples:
|
||||
|
||||
```src/lerobot/robots/so100_follower/robot_kinematic_processor.py
|
||||
def transform_features(
|
||||
self, features: dict[PipelineFeatureType, dict[str, PolicyFeature]]
|
||||
) -> dict[PipelineFeatureType, dict[str, PolicyFeature]]:
|
||||
# We only use the ee pose in the dataset, so we don't need the joint positions
|
||||
for n in self.motor_names:
|
||||
features[PipelineFeatureType.ACTION].pop(f"{n}.pos", None)
|
||||
# We specify the dataset features of this step that we want to be stored in the dataset
|
||||
for k in ["x", "y", "z", "wx", "wy", "wz", "gripper_pos"]:
|
||||
features[PipelineFeatureType.ACTION][f"ee.{k}"] = PolicyFeature(
|
||||
type=FeatureType.STATE, shape=(1,)
|
||||
)
|
||||
return features
|
||||
```
|
||||
|
||||
Here we declare what PolicyFeatures we modify in this step, so we know what features we can expect when we run the processor. These features can then be aggregated and used to create the dataset features.
|
||||
|
||||
Below is an example of how we aggregate and merge features in the phone to SO-100 record example:
|
||||
|
||||
```121:145:examples/phone_so100_record.py
|
||||
features=combine_feature_dicts(
|
||||
# Run the feature contract of the pipelines
|
||||
# This tells you how the features would look like after the pipeline steps
|
||||
aggregate_pipeline_dataset_features(
|
||||
pipeline=phone_to_robot_ee_pose_processor,
|
||||
initial_features=create_initial_features(action=phone.action_features), # <- Action features we can expect, these come from our teleop device (phone) and action processor
|
||||
use_videos=True,
|
||||
),
|
||||
aggregate_pipeline_dataset_features(
|
||||
pipeline=robot_joints_to_ee_pose,
|
||||
initial_features=create_initial_features(observation=robot.observation_features), # <- Observation features we can expect, these come from our robot and observation processor
|
||||
use_videos=True,
|
||||
patterns=["observation.state.ee"], # <- Here you could optionally filter the features we want to store in the dataset, with a specific pattern
|
||||
|
||||
),
|
||||
),
|
||||
```
|
||||
|
||||
How it works:
|
||||
|
||||
- `aggregate_pipeline_dataset_features(...)`: applies `transform_features` across the pipeline and filters by patterns (images included when `use_videos=True`, and state features included when `patterns` is specified).
|
||||
- `combine_feature_dicts(...)`: combine multiple feature dicts.
|
||||
- Recording with `record_loop(...)` uses `build_dataset_frame(...)` to build frames consistent with `dataset.features` before we call `add_frame(...)` to add the frame to the dataset.
|
||||
|
||||
## Guidance when customizing robot pipelines
|
||||
|
||||
You can store any of the following features as your action/observation space:
|
||||
|
||||
- Joint positions
|
||||
- Absolute EE poses
|
||||
- Relative EE deltas
|
||||
- Other features: joint velocity, torques, etc.
|
||||
|
||||
Pick what you want to use for your policy action and observation space and configure/modify the pipelines and steps accordingly.
|
||||
|
||||
### Different robots
|
||||
|
||||
- You can easily reuse pipelines, for example to use another robot with phone teleop, modify the examples and swap the robot `RobotKinematics` (URDF) and `motor_names` to use your own robot with Phone teleop. Additionally you should ensure `target_frame_name` points to your gripper/wrist.
|
||||
|
||||
### Safety first
|
||||
|
||||
- When changing pipelines, start with tight bounds, implement safety steps when working with real robots.
|
||||
- Its advised to start with simulation first and then move to real robots.
|
||||
|
||||
Thats it! We hope this guide helps you get started with customizing your robot pipelines, If you run into any issues at any point, jump into our [Discord community](https://discord.com/invite/s3KuuzsPFb) for support.
|
||||
@@ -1,139 +0,0 @@
|
||||
# Copyright 2024 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
"""
|
||||
This script demonstrates how to evaluate a pretrained policy from the HuggingFace Hub or from your local
|
||||
training outputs directory. In the latter case, you might want to run examples/3_train_policy.py first.
|
||||
|
||||
It requires the installation of the 'gym_pusht' simulation environment. Install it by running:
|
||||
```bash
|
||||
pip install -e ".[pusht]"
|
||||
```
|
||||
"""
|
||||
|
||||
from pathlib import Path
|
||||
|
||||
import gym_pusht # noqa: F401
|
||||
import gymnasium as gym
|
||||
import imageio
|
||||
import numpy
|
||||
import torch
|
||||
|
||||
from lerobot.policies.diffusion.modeling_diffusion import DiffusionPolicy
|
||||
|
||||
# Create a directory to store the video of the evaluation
|
||||
output_directory = Path("outputs/eval/example_pusht_diffusion")
|
||||
output_directory.mkdir(parents=True, exist_ok=True)
|
||||
|
||||
# Select your device
|
||||
device = "cuda"
|
||||
|
||||
# Provide the [hugging face repo id](https://huggingface.co/lerobot/diffusion_pusht):
|
||||
pretrained_policy_path = "lerobot/diffusion_pusht"
|
||||
# OR a path to a local outputs/train folder.
|
||||
# pretrained_policy_path = Path("outputs/train/example_pusht_diffusion")
|
||||
|
||||
policy = DiffusionPolicy.from_pretrained(pretrained_policy_path)
|
||||
|
||||
# Initialize evaluation environment to render two observation types:
|
||||
# an image of the scene and state/position of the agent. The environment
|
||||
# also automatically stops running after 300 interactions/steps.
|
||||
env = gym.make(
|
||||
"gym_pusht/PushT-v0",
|
||||
obs_type="pixels_agent_pos",
|
||||
max_episode_steps=300,
|
||||
)
|
||||
|
||||
# We can verify that the shapes of the features expected by the policy match the ones from the observations
|
||||
# produced by the environment
|
||||
print(policy.config.input_features)
|
||||
print(env.observation_space)
|
||||
|
||||
# Similarly, we can check that the actions produced by the policy will match the actions expected by the
|
||||
# environment
|
||||
print(policy.config.output_features)
|
||||
print(env.action_space)
|
||||
|
||||
# Reset the policy and environments to prepare for rollout
|
||||
policy.reset()
|
||||
numpy_observation, info = env.reset(seed=42)
|
||||
|
||||
# Prepare to collect every rewards and all the frames of the episode,
|
||||
# from initial state to final state.
|
||||
rewards = []
|
||||
frames = []
|
||||
|
||||
# Render frame of the initial state
|
||||
frames.append(env.render())
|
||||
|
||||
step = 0
|
||||
done = False
|
||||
while not done:
|
||||
# Prepare observation for the policy running in Pytorch
|
||||
state = torch.from_numpy(numpy_observation["agent_pos"])
|
||||
image = torch.from_numpy(numpy_observation["pixels"])
|
||||
|
||||
# Convert to float32 with image from channel first in [0,255]
|
||||
# to channel last in [0,1]
|
||||
state = state.to(torch.float32)
|
||||
image = image.to(torch.float32) / 255
|
||||
image = image.permute(2, 0, 1)
|
||||
|
||||
# Send data tensors from CPU to GPU
|
||||
state = state.to(device, non_blocking=True)
|
||||
image = image.to(device, non_blocking=True)
|
||||
|
||||
# Add extra (empty) batch dimension, required to forward the policy
|
||||
state = state.unsqueeze(0)
|
||||
image = image.unsqueeze(0)
|
||||
|
||||
# Create the policy input dictionary
|
||||
observation = {
|
||||
"observation.state": state,
|
||||
"observation.image": image,
|
||||
}
|
||||
|
||||
# Predict the next action with respect to the current observation
|
||||
with torch.inference_mode():
|
||||
action = policy.select_action(observation)
|
||||
|
||||
# Prepare the action for the environment
|
||||
numpy_action = action.squeeze(0).to("cpu").numpy()
|
||||
|
||||
# Step through the environment and receive a new observation
|
||||
numpy_observation, reward, terminated, truncated, info = env.step(numpy_action)
|
||||
print(f"{step=} {reward=} {terminated=}")
|
||||
|
||||
# Keep track of all the rewards and frames
|
||||
rewards.append(reward)
|
||||
frames.append(env.render())
|
||||
|
||||
# The rollout is considered done when the success state is reached (i.e. terminated is True),
|
||||
# or the maximum number of iterations is reached (i.e. truncated is True)
|
||||
done = terminated | truncated | done
|
||||
step += 1
|
||||
|
||||
if terminated:
|
||||
print("Success!")
|
||||
else:
|
||||
print("Failure!")
|
||||
|
||||
# Get the speed of environment (i.e. its number of frames per second).
|
||||
fps = env.metadata["render_fps"]
|
||||
|
||||
# Encode all frames into a mp4 video.
|
||||
video_path = output_directory / "rollout.mp4"
|
||||
imageio.mimsave(str(video_path), numpy.stack(frames), fps=fps)
|
||||
|
||||
print(f"Video of the evaluation is available in '{video_path}'.")
|
||||
@@ -1,311 +0,0 @@
|
||||
This tutorial will explain the training script, how to use it, and particularly how to configure everything needed for the training run.
|
||||
|
||||
> **Note:** The following assumes you're running these commands on a machine equipped with a cuda GPU. If you don't have one (or if you're using a Mac), you can add `--policy.device=cpu` (`--policy.device=mps` respectively). However, be advised that the code executes much slower on cpu.
|
||||
|
||||
## The training script
|
||||
|
||||
LeRobot offers a training script at [`lerobot/scripts/train.py`](../src/lerobot/scripts/train.py). At a high level it does the following:
|
||||
|
||||
- Initialize/load a configuration for the following steps using.
|
||||
- Instantiates a dataset.
|
||||
- (Optional) Instantiates a simulation environment corresponding to that dataset.
|
||||
- Instantiates a policy.
|
||||
- Runs a standard training loop with forward pass, backward pass, optimization step, and occasional logging, evaluation (of the policy on the environment), and checkpointing.
|
||||
|
||||
## Overview of the configuration system
|
||||
|
||||
In the training script, the main function `train` expects a `TrainPipelineConfig` object:
|
||||
|
||||
<!-- prettier-ignore-start -->
|
||||
```python
|
||||
# train.py
|
||||
@parser.wrap()
|
||||
def train(cfg: TrainPipelineConfig):
|
||||
```
|
||||
<!-- prettier-ignore-end -->
|
||||
|
||||
You can inspect the `TrainPipelineConfig` defined in [`lerobot/configs/train.py`](../src/lerobot/configs/train.py) (which is heavily commented and meant to be a reference to understand any option)
|
||||
|
||||
When running the script, inputs for the command line are parsed thanks to the `@parser.wrap()` decorator and an instance of this class is automatically generated. Under the hood, this is done with [Draccus](https://github.com/dlwh/draccus) which is a tool dedicated to this purpose. If you're familiar with Hydra, Draccus can similarly load configurations from config files (.json, .yaml) and also override their values through command line inputs. Unlike Hydra, these configurations are pre-defined in the code through dataclasses rather than being defined entirely in config files. This allows for more rigorous serialization/deserialization, typing, and to manipulate configuration as objects directly in the code and not as dictionaries or namespaces (which enables nice features in an IDE such as autocomplete, jump-to-def, etc.)
|
||||
|
||||
Let's have a look at a simplified example. Amongst other attributes, the training config has the following attributes:
|
||||
|
||||
<!-- prettier-ignore-start -->
|
||||
```python
|
||||
@dataclass
|
||||
class TrainPipelineConfig:
|
||||
dataset: DatasetConfig
|
||||
env: envs.EnvConfig | None = None
|
||||
policy: PreTrainedConfig | None = None
|
||||
```
|
||||
<!-- prettier-ignore-end -->
|
||||
|
||||
in which `DatasetConfig` for example is defined as such:
|
||||
|
||||
<!-- prettier-ignore-start -->
|
||||
```python
|
||||
@dataclass
|
||||
class DatasetConfig:
|
||||
repo_id: str
|
||||
episodes: list[int] | None = None
|
||||
video_backend: str = "pyav"
|
||||
```
|
||||
<!-- prettier-ignore-end -->
|
||||
|
||||
This creates a hierarchical relationship where, for example assuming we have a `cfg` instance of `TrainPipelineConfig`, we can access the `repo_id` value with `cfg.dataset.repo_id`.
|
||||
From the command line, we can specify this value by using a very similar syntax `--dataset.repo_id=repo/id`.
|
||||
|
||||
By default, every field takes its default value specified in the dataclass. If a field doesn't have a default value, it needs to be specified either from the command line or from a config file – which path is also given in the command line (more in this below). In the example above, the `dataset` field doesn't have a default value which means it must be specified.
|
||||
|
||||
## Specifying values from the CLI
|
||||
|
||||
Let's say that we want to train [Diffusion Policy](../src/lerobot/policies/diffusion) on the [pusht](https://huggingface.co/datasets/lerobot/pusht) dataset, using the [gym_pusht](https://github.com/huggingface/gym-pusht) environment for evaluation. The command to do so would look like this:
|
||||
|
||||
```bash
|
||||
lerobot-train \
|
||||
--dataset.repo_id=lerobot/pusht \
|
||||
--policy.type=diffusion \
|
||||
--env.type=pusht
|
||||
```
|
||||
|
||||
Let's break this down:
|
||||
|
||||
- To specify the dataset, we just need to specify its `repo_id` on the hub which is the only required argument in the `DatasetConfig`. The rest of the fields have default values and in this case we are fine with those so we can just add the option `--dataset.repo_id=lerobot/pusht`.
|
||||
- To specify the policy, we can just select diffusion policy using `--policy` appended with `.type`. Here, `.type` is a special argument which allows us to select config classes inheriting from `draccus.ChoiceRegistry` and that have been decorated with the `register_subclass()` method. To have a better explanation of this feature, have a look at this [Draccus demo](https://github.com/dlwh/draccus?tab=readme-ov-file#more-flexible-configuration-with-choice-types). In our code, we use this mechanism mainly to select policies, environments, robots, and some other components like optimizers. The policies available to select are located in [lerobot/policies](../src/lerobot/policies)
|
||||
- Similarly, we select the environment with `--env.type=pusht`. The different environment configs are available in [`lerobot/envs/configs.py`](../src/lerobot/envs/configs.py)
|
||||
|
||||
Let's see another example. Let's say you've been training [ACT](../src/lerobot/policies/act) on [lerobot/aloha_sim_insertion_human](https://huggingface.co/datasets/lerobot/aloha_sim_insertion_human) using the [gym-aloha](https://github.com/huggingface/gym-aloha) environment for evaluation with:
|
||||
|
||||
```bash
|
||||
lerobot-train \
|
||||
--policy.type=act \
|
||||
--dataset.repo_id=lerobot/aloha_sim_insertion_human \
|
||||
--env.type=aloha \
|
||||
--output_dir=outputs/train/act_aloha_insertion
|
||||
```
|
||||
|
||||
> Notice we added `--output_dir` to explicitly tell where to write outputs from this run (checkpoints, training state, configs etc.). This is not mandatory and if you don't specify it, a default directory will be created from the current date and time, env.type and policy.type. This will typically look like `outputs/train/2025-01-24/16-10-05_aloha_act`.
|
||||
|
||||
We now want to train a different policy for aloha on another task. We'll change the dataset and use [lerobot/aloha_sim_transfer_cube_human](https://huggingface.co/datasets/lerobot/aloha_sim_transfer_cube_human) instead. Of course, we also need to change the task of the environment as well to match this other task.
|
||||
Looking at the [`AlohaEnv`](../src/lerobot/envs/configs.py) config, the task is `"AlohaInsertion-v0"` by default, which corresponds to the task we trained on in the command above. The [gym-aloha](https://github.com/huggingface/gym-aloha?tab=readme-ov-file#description) environment also has the `AlohaTransferCube-v0` task which corresponds to this other task we want to train on. Putting this together, we can train this new policy on this different task using:
|
||||
|
||||
```bash
|
||||
lerobot-train \
|
||||
--policy.type=act \
|
||||
--dataset.repo_id=lerobot/aloha_sim_transfer_cube_human \
|
||||
--env.type=aloha \
|
||||
--env.task=AlohaTransferCube-v0 \
|
||||
--output_dir=outputs/train/act_aloha_transfer
|
||||
```
|
||||
|
||||
## Loading from a config file
|
||||
|
||||
Now, let's assume that we want to reproduce the run just above. That run has produced a `train_config.json` file in its checkpoints, which serializes the `TrainPipelineConfig` instance it used:
|
||||
|
||||
```json
|
||||
{
|
||||
"dataset": {
|
||||
"repo_id": "lerobot/aloha_sim_transfer_cube_human",
|
||||
"episodes": null,
|
||||
...
|
||||
},
|
||||
"env": {
|
||||
"type": "aloha",
|
||||
"task": "AlohaTransferCube-v0",
|
||||
"fps": 50,
|
||||
...
|
||||
},
|
||||
"policy": {
|
||||
"type": "act",
|
||||
"n_obs_steps": 1,
|
||||
...
|
||||
},
|
||||
...
|
||||
}
|
||||
```
|
||||
|
||||
We can then simply load the config values from this file using:
|
||||
|
||||
```bash
|
||||
lerobot-train \
|
||||
--config_path=outputs/train/act_aloha_transfer/checkpoints/last/pretrained_model/ \
|
||||
--output_dir=outputs/train/act_aloha_transfer_2
|
||||
```
|
||||
|
||||
`--config_path` is also a special argument which allows to initialize the config from a local config file. It can point to a directory that contains `train_config.json` or to the config file itself directly.
|
||||
|
||||
Similarly to Hydra, we can still override some parameters in the CLI if we want to, e.g.:
|
||||
|
||||
```bash
|
||||
lerobot-train \
|
||||
--config_path=outputs/train/act_aloha_transfer/checkpoints/last/pretrained_model/ \
|
||||
--output_dir=outputs/train/act_aloha_transfer_2
|
||||
--policy.n_action_steps=80
|
||||
```
|
||||
|
||||
> Note: While `--output_dir` is not required in general, in this case we need to specify it since it will otherwise take the value from the `train_config.json` (which is `outputs/train/act_aloha_transfer`). In order to prevent accidental deletion of previous run checkpoints, we raise an error if you're trying to write in an existing directory. This is not the case when resuming a run, which is what you'll learn next.
|
||||
|
||||
`--config_path` can also accept the repo_id of a repo on the hub that contains a `train_config.json` file, e.g. running:
|
||||
|
||||
```bash
|
||||
lerobot-train --config_path=lerobot/diffusion_pusht
|
||||
```
|
||||
|
||||
will start a training run with the same configuration used for training [lerobot/diffusion_pusht](https://huggingface.co/lerobot/diffusion_pusht)
|
||||
|
||||
## Resume training
|
||||
|
||||
Being able to resume a training run is important in case it crashed or aborted for any reason. We'll demonstrate how to do that here.
|
||||
|
||||
Let's reuse the command from the previous run and add a few more options:
|
||||
|
||||
```bash
|
||||
lerobot-train \
|
||||
--policy.type=act \
|
||||
--dataset.repo_id=lerobot/aloha_sim_transfer_cube_human \
|
||||
--env.type=aloha \
|
||||
--env.task=AlohaTransferCube-v0 \
|
||||
--log_freq=25 \
|
||||
--save_freq=100 \
|
||||
--output_dir=outputs/train/run_resumption
|
||||
```
|
||||
|
||||
Here we've taken care to set up the log frequency and checkpointing frequency to low numbers so we can showcase resumption. You should be able to see some logging and have a first checkpoint within 1 minute (depending on hardware). Wait for the first checkpoint to happen, you should see a line that looks like this in your terminal:
|
||||
|
||||
```
|
||||
INFO 2025-01-24 16:10:56 ts/train.py:263 Checkpoint policy after step 100
|
||||
```
|
||||
|
||||
Now let's simulate a crash by killing the process (hit `ctrl`+`c`). We can then simply resume this run from the last checkpoint available with:
|
||||
|
||||
```bash
|
||||
lerobot-train \
|
||||
--config_path=outputs/train/run_resumption/checkpoints/last/pretrained_model/ \
|
||||
--resume=true
|
||||
```
|
||||
|
||||
You should see from the logging that your training picks up from where it left off.
|
||||
|
||||
Another reason for which you might want to resume a run is simply to extend training and add more training steps. The number of training steps is set by the option `--steps`, which is 100 000 by default.
|
||||
You could double the number of steps of the previous run with:
|
||||
|
||||
```bash
|
||||
lerobot-train \
|
||||
--config_path=outputs/train/run_resumption/checkpoints/last/pretrained_model/ \
|
||||
--resume=true \
|
||||
--steps=200000
|
||||
```
|
||||
|
||||
## Outputs of a run
|
||||
|
||||
In the output directory, there will be a folder called `checkpoints` with the following structure:
|
||||
|
||||
```bash
|
||||
outputs/train/run_resumption/checkpoints
|
||||
├── 000100 # checkpoint_dir for training step 100
|
||||
│ ├── pretrained_model/
|
||||
│ │ ├── config.json # policy config
|
||||
│ │ ├── model.safetensors # policy weights
|
||||
│ │ └── train_config.json # train config
|
||||
│ └── training_state/
|
||||
│ ├── optimizer_param_groups.json # optimizer param groups
|
||||
│ ├── optimizer_state.safetensors # optimizer state
|
||||
│ ├── rng_state.safetensors # rng states
|
||||
│ ├── scheduler_state.json # scheduler state
|
||||
│ └── training_step.json # training step
|
||||
├── 000200
|
||||
└── last -> 000200 # symlink to the last available checkpoint
|
||||
```
|
||||
|
||||
## Fine-tuning a pre-trained policy
|
||||
|
||||
In addition to the features currently in Draccus, we've added a special `.path` argument for the policy, which allows to load a policy as you would with `PreTrainedPolicy.from_pretrained()`. In that case, `path` can be a local directory that contains a checkpoint or a repo_id pointing to a pretrained policy on the hub.
|
||||
|
||||
For example, we could fine-tune a [policy pre-trained on the aloha transfer task](https://huggingface.co/lerobot/act_aloha_sim_transfer_cube_human) on the aloha insertion task. We can achieve this with:
|
||||
|
||||
```bash
|
||||
lerobot-train \
|
||||
--policy.path=lerobot/act_aloha_sim_transfer_cube_human \
|
||||
--dataset.repo_id=lerobot/aloha_sim_insertion_human \
|
||||
--env.type=aloha \
|
||||
--env.task=AlohaInsertion-v0
|
||||
```
|
||||
|
||||
When doing so, keep in mind that the features of the fine-tuning dataset would have to match the input/output features of the pretrained policy.
|
||||
|
||||
## Typical logs and metrics
|
||||
|
||||
When you start the training process, you will first see your full configuration being printed in the terminal. You can check it to make sure that you configured your run correctly. The final configuration will also be saved with the checkpoint.
|
||||
|
||||
After that, you will see training log like this one:
|
||||
|
||||
```
|
||||
INFO 2024-08-14 13:35:12 ts/train.py:192 step:0 smpl:64 ep:1 epch:0.00 loss:1.112 grdn:15.387 lr:2.0e-07 updt_s:1.738 data_s:4.774
|
||||
```
|
||||
|
||||
or evaluation log:
|
||||
|
||||
```
|
||||
INFO 2024-08-14 13:38:45 ts/train.py:226 step:100 smpl:6K ep:52 epch:0.25 ∑rwrd:20.693 success:0.0% eval_s:120.266
|
||||
```
|
||||
|
||||
These logs will also be saved in wandb if `wandb.enable` is set to `true`. Here are the meaning of some abbreviations:
|
||||
|
||||
- `smpl`: number of samples seen during training.
|
||||
- `ep`: number of episodes seen during training. An episode contains multiple samples in a complete manipulation task.
|
||||
- `epch`: number of time all unique samples are seen (epoch).
|
||||
- `grdn`: gradient norm.
|
||||
- `∑rwrd`: compute the sum of rewards in every evaluation episode and then take an average of them.
|
||||
- `success`: average success rate of eval episodes. Reward and success are usually different except for the sparsing reward setting, where reward=1 only when the task is completed successfully.
|
||||
- `eval_s`: time to evaluate the policy in the environment, in second.
|
||||
- `updt_s`: time to update the network parameters, in second.
|
||||
- `data_s`: time to load a batch of data, in second.
|
||||
|
||||
Some metrics are useful for initial performance profiling. For example, if you find the current GPU utilization is low via the `nvidia-smi` command and `data_s` sometimes is too high, you may need to modify batch size or number of dataloading workers to accelerate dataloading. We also recommend [pytorch profiler](https://github.com/huggingface/lerobot?tab=readme-ov-file#improve-your-code-with-profiling) for detailed performance probing.
|
||||
|
||||
## In short
|
||||
|
||||
We'll summarize here the main use cases to remember from this tutorial.
|
||||
|
||||
#### Train a policy from scratch – CLI
|
||||
|
||||
```bash
|
||||
lerobot-train \
|
||||
--policy.type=act \ # <- select 'act' policy
|
||||
--env.type=pusht \ # <- select 'pusht' environment
|
||||
--dataset.repo_id=lerobot/pusht # <- train on this dataset
|
||||
```
|
||||
|
||||
#### Train a policy from scratch - config file + CLI
|
||||
|
||||
```bash
|
||||
lerobot-train \
|
||||
--config_path=path/to/pretrained_model \ # <- can also be a repo_id
|
||||
--policy.n_action_steps=80 # <- you may still override values
|
||||
```
|
||||
|
||||
#### Resume/continue a training run
|
||||
|
||||
```bash
|
||||
lerobot-train \
|
||||
--config_path=checkpoint/pretrained_model/ \
|
||||
--resume=true \
|
||||
--steps=200000 # <- you can change some training parameters
|
||||
```
|
||||
|
||||
#### Fine-tuning
|
||||
|
||||
```bash
|
||||
lerobot-train \
|
||||
--policy.path=lerobot/act_aloha_sim_transfer_cube_human \ # <- can also be a local path to a checkpoint
|
||||
--dataset.repo_id=lerobot/aloha_sim_insertion_human \
|
||||
--env.type=aloha \
|
||||
--env.task=AlohaInsertion-v0
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
Now that you know the basics of how to train a policy, you might want to know how to apply this knowledge to actual robots, or how to record your own datasets and train policies on your specific task?
|
||||
If that's the case, head over to the next tutorial [`7_get_started_with_real_robot.md`](./7_get_started_with_real_robot.md).
|
||||
|
||||
Or in the meantime, happy training! 🤗
|
||||
@@ -92,11 +92,11 @@ print(dataset.hf_dataset)
|
||||
# LeRobot datasets also subclasses PyTorch datasets so you can do everything you know and love from working
|
||||
# with the latter, like iterating through the dataset.
|
||||
# The __getitem__ iterates over the frames of the dataset. Since our datasets are also structured by
|
||||
# episodes, you can access the frame indices of any episode using the episode_data_index. Here, we access
|
||||
# episodes, you can access the frame indices of any episode using dataset.meta.episodes. Here, we access
|
||||
# frame indices associated to the first episode:
|
||||
episode_index = 0
|
||||
from_idx = dataset.episode_data_index["from"][episode_index].item()
|
||||
to_idx = dataset.episode_data_index["to"][episode_index].item()
|
||||
from_idx = dataset.meta.episodes["dataset_from_index"][episode_index]
|
||||
to_idx = dataset.meta.episodes["dataset_to_index"][episode_index]
|
||||
|
||||
# Then we grab all the image frames from the first camera:
|
||||
camera_key = dataset.meta.camera_keys[0]
|
||||
@@ -136,7 +136,7 @@ print(f"{dataset[0]['action'].shape=}\n") # (64, c)
|
||||
# PyTorch datasets.
|
||||
dataloader = torch.utils.data.DataLoader(
|
||||
dataset,
|
||||
num_workers=0,
|
||||
num_workers=4,
|
||||
batch_size=32,
|
||||
shuffle=True,
|
||||
)
|
||||
@@ -0,0 +1,177 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2024 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
"""
|
||||
This example demonstrates how to use image transforms with LeRobot datasets for data augmentation during training.
|
||||
|
||||
Image transforms are applied to camera frames to improve model robustness and generalization. They are applied
|
||||
at training time only, not during dataset recording, allowing you to experiment with different augmentations
|
||||
without re-recording data.
|
||||
"""
|
||||
|
||||
import torch
|
||||
from torchvision.transforms import v2
|
||||
from torchvision.transforms.functional import to_pil_image
|
||||
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
from lerobot.datasets.transforms import ImageTransformConfig, ImageTransforms, ImageTransformsConfig
|
||||
|
||||
|
||||
def save_image(tensor, filename):
|
||||
"""Helper function to save a tensor as an image file."""
|
||||
if tensor.dim() == 3: # [C, H, W]
|
||||
if tensor.max() > 1.0:
|
||||
tensor = tensor / 255.0
|
||||
tensor = torch.clamp(tensor, 0.0, 1.0)
|
||||
pil_image = to_pil_image(tensor)
|
||||
pil_image.save(filename)
|
||||
print(f"Saved: {filename}")
|
||||
else:
|
||||
print(f"Skipped {filename}: unexpected tensor shape {tensor.shape}")
|
||||
|
||||
|
||||
def example_1_default_transforms():
|
||||
"""Example 1: Use default transform configuration and save original vs transformed images"""
|
||||
print("\n Example 1: Default Transform Configuration with Image Saving")
|
||||
|
||||
repo_id = "pepijn223/record_main_0" # Example dataset
|
||||
|
||||
try:
|
||||
# Load dataset without transforms (original)
|
||||
dataset_original = LeRobotDataset(repo_id=repo_id)
|
||||
|
||||
# Load dataset with transforms enabled
|
||||
transforms_config = ImageTransformsConfig(
|
||||
enable=True, # Enable transforms (disabled by default)
|
||||
max_num_transforms=2, # Apply up to 2 transforms per frame
|
||||
random_order=False, # Apply in standard order
|
||||
)
|
||||
dataset_with_transforms = LeRobotDataset(
|
||||
repo_id=repo_id, image_transforms=ImageTransforms(transforms_config)
|
||||
)
|
||||
|
||||
# Save original and transformed images for comparison
|
||||
if len(dataset_original) > 0:
|
||||
frame_idx = 0 # Use first frame
|
||||
original_sample = dataset_original[frame_idx]
|
||||
transformed_sample = dataset_with_transforms[frame_idx]
|
||||
|
||||
print(f"Saving comparison images (frame {frame_idx}):")
|
||||
|
||||
for cam_key in dataset_original.meta.camera_keys:
|
||||
if cam_key in original_sample and cam_key in transformed_sample:
|
||||
cam_name = cam_key.replace(".", "_").replace("/", "_")
|
||||
|
||||
# Save original and transformed images
|
||||
save_image(original_sample[cam_key], f"{cam_name}_original.png")
|
||||
save_image(transformed_sample[cam_key], f"{cam_name}_transformed.png")
|
||||
|
||||
except Exception as e:
|
||||
print(f"Could not load dataset '{repo_id}': {e}")
|
||||
|
||||
|
||||
def example_2_custom_transforms():
|
||||
"""Example 2: Create custom transform configuration and save examples"""
|
||||
print("\n Example 2: Custom Transform Configuration")
|
||||
|
||||
repo_id = "pepijn223/record_main_0" # Example dataset
|
||||
|
||||
try:
|
||||
# Create custom transform configuration with strong effects
|
||||
custom_transforms_config = ImageTransformsConfig(
|
||||
enable=True,
|
||||
max_num_transforms=2, # Apply up to 2 transforms per frame
|
||||
random_order=True, # Apply transforms in random order
|
||||
tfs={
|
||||
"brightness": ImageTransformConfig(
|
||||
weight=1.0,
|
||||
type="ColorJitter",
|
||||
kwargs={"brightness": (0.5, 1.5)}, # Strong brightness range
|
||||
),
|
||||
"contrast": ImageTransformConfig(
|
||||
weight=1.0, # Higher weight = more likely to be selected
|
||||
type="ColorJitter",
|
||||
kwargs={"contrast": (0.6, 1.4)}, # Strong contrast
|
||||
),
|
||||
"sharpness": ImageTransformConfig(
|
||||
weight=0.5, # Lower weight = less likely to be selected
|
||||
type="SharpnessJitter",
|
||||
kwargs={"sharpness": (0.2, 2.0)}, # Strong sharpness variation
|
||||
),
|
||||
},
|
||||
)
|
||||
|
||||
dataset_with_custom_transforms = LeRobotDataset(
|
||||
repo_id=repo_id, image_transforms=ImageTransforms(custom_transforms_config)
|
||||
)
|
||||
|
||||
# Save examples with strong transforms
|
||||
if len(dataset_with_custom_transforms) > 0:
|
||||
sample = dataset_with_custom_transforms[0]
|
||||
print("Saving custom transform examples:")
|
||||
|
||||
for cam_key in dataset_with_custom_transforms.meta.camera_keys:
|
||||
if cam_key in sample:
|
||||
cam_name = cam_key.replace(".", "_").replace("/", "_")
|
||||
save_image(sample[cam_key], f"{cam_name}_custom_transforms.png")
|
||||
|
||||
except Exception as e:
|
||||
print(f"Could not load dataset '{repo_id}': {e}")
|
||||
|
||||
|
||||
def example_3_torchvision_transforms():
|
||||
"""Example 3: Use pure torchvision transforms and save examples"""
|
||||
print("\n Example 3: Pure Torchvision Transforms")
|
||||
|
||||
repo_id = "pepijn223/record_main_0" # Example dataset
|
||||
|
||||
try:
|
||||
# Create torchvision transform pipeline
|
||||
torchvision_transforms = v2.Compose(
|
||||
[
|
||||
v2.ColorJitter(brightness=0.3, contrast=0.3, saturation=0.3, hue=0.1),
|
||||
v2.GaussianBlur(kernel_size=3, sigma=(0.1, 2.0)),
|
||||
v2.RandomRotation(degrees=10), # Small rotation
|
||||
]
|
||||
)
|
||||
|
||||
dataset_with_torchvision = LeRobotDataset(repo_id=repo_id, image_transforms=torchvision_transforms)
|
||||
|
||||
# Save examples with torchvision transforms
|
||||
if len(dataset_with_torchvision) > 0:
|
||||
sample = dataset_with_torchvision[0]
|
||||
print("Saving torchvision transform examples:")
|
||||
|
||||
for cam_key in dataset_with_torchvision.meta.camera_keys:
|
||||
if cam_key in sample:
|
||||
cam_name = cam_key.replace(".", "_").replace("/", "_")
|
||||
save_image(sample[cam_key], f"{cam_name}_torchvision.png")
|
||||
|
||||
except Exception as e:
|
||||
print(f"Could not load dataset '{repo_id}': {e}")
|
||||
|
||||
|
||||
def main():
|
||||
"""Run all examples"""
|
||||
print("LeRobot Dataset Image Transforms Examples")
|
||||
|
||||
example_1_default_transforms()
|
||||
example_2_custom_transforms()
|
||||
example_3_torchvision_transforms()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
main()
|
||||
@@ -1,6 +1,24 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
from lerobot.datasets.utils import hw_to_dataset_features
|
||||
from lerobot.policies.act.modeling_act import ACTPolicy
|
||||
from lerobot.policies.factory import make_pre_post_processors
|
||||
from lerobot.processor import make_default_processors
|
||||
from lerobot.record import record_loop
|
||||
from lerobot.robots.lekiwi import LeKiwiClient, LeKiwiClientConfig
|
||||
from lerobot.utils.control_utils import init_keyboard_listener
|
||||
@@ -11,12 +29,16 @@ NUM_EPISODES = 2
|
||||
FPS = 30
|
||||
EPISODE_TIME_SEC = 60
|
||||
TASK_DESCRIPTION = "My task description"
|
||||
HF_MODEL_ID = "<hf_username>/<model_repo_id>"
|
||||
HF_DATASET_ID = "<hf_username>/<eval_dataset_repo_id>"
|
||||
|
||||
# Create the robot and teleoperator configurations
|
||||
# Create the robot configuration & robot
|
||||
robot_config = LeKiwiClientConfig(remote_ip="172.18.134.136", id="lekiwi")
|
||||
|
||||
robot = LeKiwiClient(robot_config)
|
||||
|
||||
policy = ACTPolicy.from_pretrained("<hf_username>/<policy_repo_id>")
|
||||
# Create policy
|
||||
policy = ACTPolicy.from_pretrained(HF_MODEL_ID)
|
||||
|
||||
# Configure the dataset features
|
||||
action_features = hw_to_dataset_features(robot.action_features, "action")
|
||||
@@ -25,7 +47,7 @@ dataset_features = {**action_features, **obs_features}
|
||||
|
||||
# Create the dataset
|
||||
dataset = LeRobotDataset.create(
|
||||
repo_id="<hf_username>/<eval_dataset_repo_id>",
|
||||
repo_id=HF_DATASET_ID,
|
||||
fps=FPS,
|
||||
features=dataset_features,
|
||||
robot_type=robot.name,
|
||||
@@ -33,33 +55,52 @@ dataset = LeRobotDataset.create(
|
||||
image_writer_threads=4,
|
||||
)
|
||||
|
||||
# Build Policy Processors
|
||||
preprocessor, postprocessor = make_pre_post_processors(
|
||||
policy_cfg=policy,
|
||||
pretrained_path=HF_MODEL_ID,
|
||||
dataset_stats=dataset.meta.stats,
|
||||
# The inference device is automatically set to match the detected hardware, overriding any previous device settings from training to ensure compatibility.
|
||||
preprocessor_overrides={"device_processor": {"device": str(policy.config.device)}},
|
||||
)
|
||||
|
||||
# Connect the robot
|
||||
# To connect you already should have this script running on LeKiwi: `python -m lerobot.robots.lekiwi.lekiwi_host --robot.id=my_awesome_kiwi`
|
||||
robot.connect()
|
||||
|
||||
_init_rerun(session_name="recording")
|
||||
# TODO(Steven): Update this example to use pipelines
|
||||
teleop_action_processor, robot_action_processor, robot_observation_processor = make_default_processors()
|
||||
|
||||
# Initialize the keyboard listener and rerun visualization
|
||||
listener, events = init_keyboard_listener()
|
||||
_init_rerun(session_name="lekiwi_evaluate")
|
||||
|
||||
if not robot.is_connected:
|
||||
raise ValueError("Robot is not connected!")
|
||||
|
||||
print("Starting evaluate loop...")
|
||||
recorded_episodes = 0
|
||||
while recorded_episodes < NUM_EPISODES and not events["stop_recording"]:
|
||||
log_say(f"Running inference, recording eval episode {recorded_episodes} of {NUM_EPISODES}")
|
||||
|
||||
# Run the policy inference loop
|
||||
# Main record loop
|
||||
record_loop(
|
||||
robot=robot,
|
||||
events=events,
|
||||
fps=FPS,
|
||||
policy=policy,
|
||||
preprocessor=preprocessor, # Pass the pre and post policy processors
|
||||
postprocessor=postprocessor,
|
||||
dataset=dataset,
|
||||
control_time_s=EPISODE_TIME_SEC,
|
||||
single_task=TASK_DESCRIPTION,
|
||||
display_data=True,
|
||||
teleop_action_processor=teleop_action_processor,
|
||||
robot_action_processor=robot_action_processor,
|
||||
robot_observation_processor=robot_observation_processor,
|
||||
)
|
||||
|
||||
# Logic for reset env
|
||||
# Reset the environment if not stopping or re-recording
|
||||
if not events["stop_recording"] and (
|
||||
(recorded_episodes < NUM_EPISODES - 1) or events["rerecord_episode"]
|
||||
):
|
||||
@@ -71,6 +112,9 @@ while recorded_episodes < NUM_EPISODES and not events["stop_recording"]:
|
||||
control_time_s=EPISODE_TIME_SEC,
|
||||
single_task=TASK_DESCRIPTION,
|
||||
display_data=True,
|
||||
teleop_action_processor=teleop_action_processor,
|
||||
robot_action_processor=robot_action_processor,
|
||||
robot_observation_processor=robot_observation_processor,
|
||||
)
|
||||
|
||||
if events["rerecord_episode"]:
|
||||
@@ -80,11 +124,12 @@ while recorded_episodes < NUM_EPISODES and not events["stop_recording"]:
|
||||
dataset.clear_episode_buffer()
|
||||
continue
|
||||
|
||||
# Save episode
|
||||
dataset.save_episode()
|
||||
recorded_episodes += 1
|
||||
|
||||
# Upload to hub and clean up
|
||||
dataset.push_to_hub()
|
||||
|
||||
# Clean up
|
||||
log_say("Stop recording")
|
||||
robot.disconnect()
|
||||
listener.stop()
|
||||
dataset.push_to_hub()
|
||||
|
||||
+41
-10
@@ -1,5 +1,22 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
from lerobot.datasets.utils import hw_to_dataset_features
|
||||
from lerobot.processor import make_default_processors
|
||||
from lerobot.record import record_loop
|
||||
from lerobot.robots.lekiwi.config_lekiwi import LeKiwiClientConfig
|
||||
from lerobot.robots.lekiwi.lekiwi_client import LeKiwiClient
|
||||
@@ -9,21 +26,26 @@ from lerobot.utils.control_utils import init_keyboard_listener
|
||||
from lerobot.utils.utils import log_say
|
||||
from lerobot.utils.visualization_utils import _init_rerun
|
||||
|
||||
NUM_EPISODES = 3
|
||||
NUM_EPISODES = 2
|
||||
FPS = 30
|
||||
EPISODE_TIME_SEC = 30
|
||||
RESET_TIME_SEC = 10
|
||||
TASK_DESCRIPTION = "My task description"
|
||||
HF_REPO_ID = "<hf_username>/<dataset_repo_id>"
|
||||
|
||||
# Create the robot and teleoperator configurations
|
||||
robot_config = LeKiwiClientConfig(remote_ip="172.18.134.136", id="lekiwi")
|
||||
leader_arm_config = SO100LeaderConfig(port="/dev/tty.usbmodem585A0077581", id="my_awesome_leader_arm")
|
||||
keyboard_config = KeyboardTeleopConfig()
|
||||
|
||||
# Initialize the robot and teleoperator
|
||||
robot = LeKiwiClient(robot_config)
|
||||
leader_arm = SO100Leader(leader_arm_config)
|
||||
keyboard = KeyboardTeleop(keyboard_config)
|
||||
|
||||
# TODO(Steven): Update this example to use pipelines
|
||||
teleop_action_processor, robot_action_processor, robot_observation_processor = make_default_processors()
|
||||
|
||||
# Configure the dataset features
|
||||
action_features = hw_to_dataset_features(robot.action_features, "action")
|
||||
obs_features = hw_to_dataset_features(robot.observation_features, "observation")
|
||||
@@ -31,7 +53,7 @@ dataset_features = {**action_features, **obs_features}
|
||||
|
||||
# Create the dataset
|
||||
dataset = LeRobotDataset.create(
|
||||
repo_id="<hf_username>/<dataset_repo_id>",
|
||||
repo_id=HF_REPO_ID,
|
||||
fps=FPS,
|
||||
features=dataset_features,
|
||||
robot_type=robot.name,
|
||||
@@ -39,23 +61,25 @@ dataset = LeRobotDataset.create(
|
||||
image_writer_threads=4,
|
||||
)
|
||||
|
||||
# Connect the robot and teleoperator
|
||||
# To connect you already should have this script running on LeKiwi: `python -m lerobot.robots.lekiwi.lekiwi_host --robot.id=my_awesome_kiwi`
|
||||
robot.connect()
|
||||
leader_arm.connect()
|
||||
keyboard.connect()
|
||||
|
||||
# Initialize the keyboard listener and rerun visualization
|
||||
listener, events = init_keyboard_listener()
|
||||
_init_rerun(session_name="lekiwi_record")
|
||||
|
||||
listener, events = init_keyboard_listener()
|
||||
|
||||
if not robot.is_connected or not leader_arm.is_connected or not keyboard.is_connected:
|
||||
raise ValueError("Robot, leader arm of keyboard is not connected!")
|
||||
raise ValueError("Robot or teleop is not connected!")
|
||||
|
||||
print("Starting record loop...")
|
||||
recorded_episodes = 0
|
||||
while recorded_episodes < NUM_EPISODES and not events["stop_recording"]:
|
||||
log_say(f"Recording episode {recorded_episodes}")
|
||||
|
||||
# Run the record loop
|
||||
# Main record loop
|
||||
record_loop(
|
||||
robot=robot,
|
||||
events=events,
|
||||
@@ -65,9 +89,12 @@ while recorded_episodes < NUM_EPISODES and not events["stop_recording"]:
|
||||
control_time_s=EPISODE_TIME_SEC,
|
||||
single_task=TASK_DESCRIPTION,
|
||||
display_data=True,
|
||||
teleop_action_processor=teleop_action_processor,
|
||||
robot_action_processor=robot_action_processor,
|
||||
robot_observation_processor=robot_observation_processor,
|
||||
)
|
||||
|
||||
# Logic for reset env
|
||||
# Reset the environment if not stopping or re-recording
|
||||
if not events["stop_recording"] and (
|
||||
(recorded_episodes < NUM_EPISODES - 1) or events["rerecord_episode"]
|
||||
):
|
||||
@@ -80,6 +107,9 @@ while recorded_episodes < NUM_EPISODES and not events["stop_recording"]:
|
||||
control_time_s=RESET_TIME_SEC,
|
||||
single_task=TASK_DESCRIPTION,
|
||||
display_data=True,
|
||||
teleop_action_processor=teleop_action_processor,
|
||||
robot_action_processor=robot_action_processor,
|
||||
robot_observation_processor=robot_observation_processor,
|
||||
)
|
||||
|
||||
if events["rerecord_episode"]:
|
||||
@@ -89,13 +119,14 @@ while recorded_episodes < NUM_EPISODES and not events["stop_recording"]:
|
||||
dataset.clear_episode_buffer()
|
||||
continue
|
||||
|
||||
# Save episode
|
||||
dataset.save_episode()
|
||||
recorded_episodes += 1
|
||||
|
||||
# Upload to hub and clean up
|
||||
dataset.push_to_hub()
|
||||
|
||||
# Clean up
|
||||
log_say("Stop recording")
|
||||
robot.disconnect()
|
||||
leader_arm.disconnect()
|
||||
keyboard.disconnect()
|
||||
listener.stop()
|
||||
dataset.push_to_hub()
|
||||
|
||||
@@ -1,3 +1,19 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import time
|
||||
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
@@ -8,25 +24,36 @@ from lerobot.utils.utils import log_say
|
||||
|
||||
EPISODE_IDX = 0
|
||||
|
||||
# Initialize the robot config
|
||||
robot_config = LeKiwiClientConfig(remote_ip="172.18.134.136", id="lekiwi")
|
||||
|
||||
# Initialize the robot
|
||||
robot = LeKiwiClient(robot_config)
|
||||
|
||||
# Fetch the dataset to replay
|
||||
dataset = LeRobotDataset("<hf_username>/<dataset_repo_id>", episodes=[EPISODE_IDX])
|
||||
actions = dataset.hf_dataset.select_columns("action")
|
||||
# Filter dataset to only include frames from the specified episode since episodes are chunked in dataset V3.0
|
||||
episode_frames = dataset.hf_dataset.filter(lambda x: x["episode_index"] == EPISODE_IDX)
|
||||
actions = episode_frames.select_columns("action")
|
||||
|
||||
# Connect to the robot
|
||||
robot.connect()
|
||||
|
||||
if not robot.is_connected:
|
||||
raise ValueError("Robot is not connected!")
|
||||
|
||||
print("Starting replay loop...")
|
||||
log_say(f"Replaying episode {EPISODE_IDX}")
|
||||
for idx in range(dataset.num_frames):
|
||||
for idx in range(len(episode_frames)):
|
||||
t0 = time.perf_counter()
|
||||
|
||||
# Get recorded action from dataset
|
||||
action = {
|
||||
name: float(actions[idx]["action"][i]) for i, name in enumerate(dataset.features["action"]["names"])
|
||||
}
|
||||
robot.send_action(action)
|
||||
|
||||
# Send action to robot
|
||||
_ = robot.send_action(action)
|
||||
|
||||
busy_wait(max(1.0 / dataset.fps - (time.perf_counter() - t0), 0.0))
|
||||
|
||||
|
||||
@@ -1,3 +1,19 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import time
|
||||
|
||||
from lerobot.robots.lekiwi import LeKiwiClient, LeKiwiClientConfig
|
||||
@@ -13,35 +29,44 @@ robot_config = LeKiwiClientConfig(remote_ip="172.18.134.136", id="my_lekiwi")
|
||||
teleop_arm_config = SO100LeaderConfig(port="/dev/tty.usbmodem585A0077581", id="my_awesome_leader_arm")
|
||||
keyboard_config = KeyboardTeleopConfig(id="my_laptop_keyboard")
|
||||
|
||||
# Initialize the robot and teleoperator
|
||||
robot = LeKiwiClient(robot_config)
|
||||
leader_arm = SO100Leader(teleop_arm_config)
|
||||
keyboard = KeyboardTeleop(keyboard_config)
|
||||
|
||||
# Connect to the robot and teleoperator
|
||||
# To connect you already should have this script running on LeKiwi: `python -m lerobot.robots.lekiwi.lekiwi_host --robot.id=my_awesome_kiwi`
|
||||
robot.connect()
|
||||
leader_arm.connect()
|
||||
keyboard.connect()
|
||||
|
||||
# Init rerun viewer
|
||||
_init_rerun(session_name="lekiwi_teleop")
|
||||
|
||||
if not robot.is_connected or not leader_arm.is_connected or not keyboard.is_connected:
|
||||
raise ValueError("Robot, leader arm of keyboard is not connected!")
|
||||
raise ValueError("Robot or teleop is not connected!")
|
||||
|
||||
print("Starting teleop loop...")
|
||||
while True:
|
||||
t0 = time.perf_counter()
|
||||
|
||||
# Get robot observation
|
||||
observation = robot.get_observation()
|
||||
|
||||
# Get teleop action
|
||||
# Arm
|
||||
arm_action = leader_arm.get_action()
|
||||
arm_action = {f"arm_{k}": v for k, v in arm_action.items()}
|
||||
|
||||
# Keyboard
|
||||
keyboard_keys = keyboard.get_action()
|
||||
base_action = robot._from_keyboard_to_base_action(keyboard_keys)
|
||||
|
||||
log_rerun_data(observation, {**arm_action, **base_action})
|
||||
|
||||
action = {**arm_action, **base_action} if len(base_action) > 0 else arm_action
|
||||
|
||||
robot.send_action(action)
|
||||
# Send action to robot
|
||||
_ = robot.send_action(action)
|
||||
|
||||
# Visualize
|
||||
log_rerun_data(observation=observation, action=action)
|
||||
|
||||
busy_wait(max(1.0 / FPS - (time.perf_counter() - t0), 0.0))
|
||||
|
||||
@@ -0,0 +1,197 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from lerobot.cameras.opencv.configuration_opencv import OpenCVCameraConfig
|
||||
from lerobot.configs.types import FeatureType, PolicyFeature
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
from lerobot.datasets.pipeline_features import aggregate_pipeline_dataset_features, create_initial_features
|
||||
from lerobot.datasets.utils import combine_feature_dicts
|
||||
from lerobot.model.kinematics import RobotKinematics
|
||||
from lerobot.policies.act.modeling_act import ACTPolicy
|
||||
from lerobot.policies.factory import make_pre_post_processors
|
||||
from lerobot.processor import (
|
||||
RobotAction,
|
||||
RobotObservation,
|
||||
RobotProcessorPipeline,
|
||||
make_default_teleop_action_processor,
|
||||
)
|
||||
from lerobot.processor.converters import (
|
||||
observation_to_transition,
|
||||
robot_action_observation_to_transition,
|
||||
transition_to_observation,
|
||||
transition_to_robot_action,
|
||||
)
|
||||
from lerobot.record import record_loop
|
||||
from lerobot.robots.so100_follower.config_so100_follower import SO100FollowerConfig
|
||||
from lerobot.robots.so100_follower.robot_kinematic_processor import (
|
||||
ForwardKinematicsJointsToEE,
|
||||
InverseKinematicsEEToJoints,
|
||||
)
|
||||
from lerobot.robots.so100_follower.so100_follower import SO100Follower
|
||||
from lerobot.utils.control_utils import init_keyboard_listener
|
||||
from lerobot.utils.utils import log_say
|
||||
from lerobot.utils.visualization_utils import _init_rerun
|
||||
|
||||
NUM_EPISODES = 5
|
||||
FPS = 30
|
||||
EPISODE_TIME_SEC = 60
|
||||
TASK_DESCRIPTION = "My task description"
|
||||
HF_MODEL_ID = "<hf_username>/<model_repo_id>"
|
||||
HF_DATASET_ID = "<hf_username>/<dataset_repo_id>"
|
||||
|
||||
# Create the robot configuration & robot
|
||||
camera_config = {"front": OpenCVCameraConfig(index_or_path=0, width=640, height=480, fps=FPS)}
|
||||
robot_config = SO100FollowerConfig(
|
||||
port="/dev/tty.usbmodem58760434471",
|
||||
id="my_awesome_follower_arm",
|
||||
cameras=camera_config,
|
||||
use_degrees=True,
|
||||
)
|
||||
|
||||
robot = SO100Follower(robot_config)
|
||||
|
||||
# Create policy
|
||||
policy = ACTPolicy.from_pretrained(HF_MODEL_ID)
|
||||
|
||||
# NOTE: It is highly recommended to use the urdf in the SO-ARM100 repo: https://github.com/TheRobotStudio/SO-ARM100/blob/main/Simulation/SO101/so101_new_calib.urdf
|
||||
kinematics_solver = RobotKinematics(
|
||||
urdf_path="./SO101/so101_new_calib.urdf",
|
||||
target_frame_name="gripper_frame_link",
|
||||
joint_names=list(robot.bus.motors.keys()),
|
||||
)
|
||||
|
||||
# Build pipeline to convert EE action to joints action
|
||||
robot_ee_to_joints_processor = RobotProcessorPipeline[tuple[RobotAction, RobotObservation], RobotAction](
|
||||
steps=[
|
||||
InverseKinematicsEEToJoints(
|
||||
kinematics=kinematics_solver,
|
||||
motor_names=list(robot.bus.motors.keys()),
|
||||
initial_guess_current_joints=True,
|
||||
),
|
||||
],
|
||||
to_transition=robot_action_observation_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
|
||||
# Build pipeline to convert joints observation to EE observation
|
||||
robot_joints_to_ee_pose_processor = RobotProcessorPipeline[RobotObservation, RobotObservation](
|
||||
steps=[
|
||||
ForwardKinematicsJointsToEE(kinematics=kinematics_solver, motor_names=list(robot.bus.motors.keys()))
|
||||
],
|
||||
to_transition=observation_to_transition,
|
||||
to_output=transition_to_observation,
|
||||
)
|
||||
|
||||
# Create the dataset
|
||||
dataset = LeRobotDataset.create(
|
||||
repo_id=HF_DATASET_ID,
|
||||
fps=FPS,
|
||||
features=combine_feature_dicts(
|
||||
aggregate_pipeline_dataset_features(
|
||||
pipeline=robot_joints_to_ee_pose_processor,
|
||||
initial_features=create_initial_features(observation=robot.observation_features),
|
||||
use_videos=True,
|
||||
),
|
||||
# User for now should be explicit on the feature keys that were used for record
|
||||
# Alternatively, the user can pass the processor step that has the right features
|
||||
aggregate_pipeline_dataset_features(
|
||||
pipeline=make_default_teleop_action_processor(),
|
||||
initial_features=create_initial_features(
|
||||
action={
|
||||
f"ee.{k}": PolicyFeature(type=FeatureType.ACTION, shape=(1,))
|
||||
for k in ["x", "y", "z", "wx", "wy", "wz", "gripper_pos"]
|
||||
}
|
||||
),
|
||||
use_videos=True,
|
||||
),
|
||||
),
|
||||
robot_type=robot.name,
|
||||
use_videos=True,
|
||||
image_writer_threads=4,
|
||||
)
|
||||
|
||||
# Build Policy Processors
|
||||
preprocessor, postprocessor = make_pre_post_processors(
|
||||
policy_cfg=policy,
|
||||
pretrained_path=HF_MODEL_ID,
|
||||
dataset_stats=dataset.meta.stats,
|
||||
# The inference device is automatically set to match the detected hardware, overriding any previous device settings from training to ensure compatibility.
|
||||
preprocessor_overrides={"device_processor": {"device": str(policy.config.device)}},
|
||||
)
|
||||
|
||||
# Connect the robot
|
||||
robot.connect()
|
||||
|
||||
# Initialize the keyboard listener and rerun visualization
|
||||
listener, events = init_keyboard_listener()
|
||||
_init_rerun(session_name="phone_so100_evaluate")
|
||||
|
||||
if not robot.is_connected:
|
||||
raise ValueError("Robot is not connected!")
|
||||
|
||||
print("Starting evaluate loop...")
|
||||
episode_idx = 0
|
||||
for episode_idx in range(NUM_EPISODES):
|
||||
log_say(f"Running inference, recording eval episode {episode_idx + 1} of {NUM_EPISODES}")
|
||||
|
||||
# Main record loop
|
||||
record_loop(
|
||||
robot=robot,
|
||||
events=events,
|
||||
fps=FPS,
|
||||
policy=policy,
|
||||
preprocessor=preprocessor, # Pass the pre and post policy processors
|
||||
postprocessor=postprocessor,
|
||||
dataset=dataset,
|
||||
control_time_s=EPISODE_TIME_SEC,
|
||||
single_task=TASK_DESCRIPTION,
|
||||
display_data=True,
|
||||
teleop_action_processor=make_default_teleop_action_processor(),
|
||||
robot_action_processor=robot_ee_to_joints_processor,
|
||||
robot_observation_processor=robot_joints_to_ee_pose_processor,
|
||||
)
|
||||
|
||||
# Reset the environment if not stopping or re-recording
|
||||
if not events["stop_recording"] and ((episode_idx < NUM_EPISODES - 1) or events["rerecord_episode"]):
|
||||
log_say("Reset the environment")
|
||||
record_loop(
|
||||
robot=robot,
|
||||
events=events,
|
||||
fps=FPS,
|
||||
control_time_s=EPISODE_TIME_SEC,
|
||||
single_task=TASK_DESCRIPTION,
|
||||
display_data=True,
|
||||
teleop_action_processor=make_default_teleop_action_processor(),
|
||||
robot_action_processor=robot_ee_to_joints_processor,
|
||||
robot_observation_processor=robot_joints_to_ee_pose_processor,
|
||||
)
|
||||
|
||||
if events["rerecord_episode"]:
|
||||
log_say("Re-record episode")
|
||||
events["rerecord_episode"] = False
|
||||
events["exit_early"] = False
|
||||
dataset.clear_episode_buffer()
|
||||
continue
|
||||
|
||||
# Save episode
|
||||
dataset.save_episode()
|
||||
episode_idx += 1
|
||||
|
||||
# Clean up
|
||||
log_say("Stop recording")
|
||||
robot.disconnect()
|
||||
listener.stop()
|
||||
dataset.push_to_hub()
|
||||
@@ -0,0 +1,204 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from lerobot.cameras.opencv.configuration_opencv import OpenCVCameraConfig
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
from lerobot.datasets.pipeline_features import aggregate_pipeline_dataset_features, create_initial_features
|
||||
from lerobot.datasets.utils import combine_feature_dicts
|
||||
from lerobot.model.kinematics import RobotKinematics
|
||||
from lerobot.processor import RobotAction, RobotObservation, RobotProcessorPipeline
|
||||
from lerobot.processor.converters import (
|
||||
observation_to_transition,
|
||||
robot_action_observation_to_transition,
|
||||
transition_to_observation,
|
||||
transition_to_robot_action,
|
||||
)
|
||||
from lerobot.record import record_loop
|
||||
from lerobot.robots.so100_follower.config_so100_follower import SO100FollowerConfig
|
||||
from lerobot.robots.so100_follower.robot_kinematic_processor import (
|
||||
EEBoundsAndSafety,
|
||||
EEReferenceAndDelta,
|
||||
ForwardKinematicsJointsToEE,
|
||||
GripperVelocityToJoint,
|
||||
InverseKinematicsEEToJoints,
|
||||
)
|
||||
from lerobot.robots.so100_follower.so100_follower import SO100Follower
|
||||
from lerobot.teleoperators.phone.config_phone import PhoneConfig, PhoneOS
|
||||
from lerobot.teleoperators.phone.phone_processor import MapPhoneActionToRobotAction
|
||||
from lerobot.teleoperators.phone.teleop_phone import Phone
|
||||
from lerobot.utils.control_utils import init_keyboard_listener
|
||||
from lerobot.utils.utils import log_say
|
||||
from lerobot.utils.visualization_utils import _init_rerun
|
||||
|
||||
NUM_EPISODES = 2
|
||||
FPS = 30
|
||||
EPISODE_TIME_SEC = 60
|
||||
RESET_TIME_SEC = 30
|
||||
TASK_DESCRIPTION = "My task description"
|
||||
HF_REPO_ID = "<hf_username>/<dataset_repo_id>"
|
||||
|
||||
# Create the robot and teleoperator configurations
|
||||
camera_config = {"front": OpenCVCameraConfig(index_or_path=0, width=640, height=480, fps=FPS)}
|
||||
robot_config = SO100FollowerConfig(
|
||||
port="/dev/tty.usbmodem5A460814411",
|
||||
id="my_awesome_follower_arm",
|
||||
cameras=camera_config,
|
||||
use_degrees=True,
|
||||
)
|
||||
teleop_config = PhoneConfig(phone_os=PhoneOS.IOS) # or PhoneOS.ANDROID
|
||||
|
||||
# Initialize the robot and teleoperator
|
||||
robot = SO100Follower(robot_config)
|
||||
phone = Phone(teleop_config)
|
||||
|
||||
# NOTE: It is highly recommended to use the urdf in the SO-ARM100 repo: https://github.com/TheRobotStudio/SO-ARM100/blob/main/Simulation/SO101/so101_new_calib.urdf
|
||||
kinematics_solver = RobotKinematics(
|
||||
urdf_path="./SO101/so101_new_calib.urdf",
|
||||
target_frame_name="gripper_frame_link",
|
||||
joint_names=list(robot.bus.motors.keys()),
|
||||
)
|
||||
|
||||
# Build pipeline to convert phone action to EE action
|
||||
phone_to_robot_ee_pose_processor = RobotProcessorPipeline[tuple[RobotAction, RobotObservation], RobotAction](
|
||||
steps=[
|
||||
MapPhoneActionToRobotAction(platform=teleop_config.phone_os),
|
||||
EEReferenceAndDelta(
|
||||
kinematics=kinematics_solver,
|
||||
end_effector_step_sizes={"x": 0.5, "y": 0.5, "z": 0.5},
|
||||
motor_names=list(robot.bus.motors.keys()),
|
||||
use_latched_reference=True,
|
||||
),
|
||||
EEBoundsAndSafety(
|
||||
end_effector_bounds={"min": [-1.0, -1.0, -1.0], "max": [1.0, 1.0, 1.0]},
|
||||
max_ee_step_m=0.20,
|
||||
max_ee_twist_step_rad=0.50,
|
||||
),
|
||||
GripperVelocityToJoint(speed_factor=20.0),
|
||||
],
|
||||
to_transition=robot_action_observation_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
|
||||
# Build pipeline to convert EE action to joints action
|
||||
robot_ee_to_joints_processor = RobotProcessorPipeline[tuple[RobotAction, RobotObservation], RobotAction](
|
||||
steps=[
|
||||
InverseKinematicsEEToJoints(
|
||||
kinematics=kinematics_solver,
|
||||
motor_names=list(robot.bus.motors.keys()),
|
||||
initial_guess_current_joints=True,
|
||||
),
|
||||
],
|
||||
to_transition=robot_action_observation_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
|
||||
# Build pipeline to convert joint observation to EE observation
|
||||
robot_joints_to_ee_pose = RobotProcessorPipeline[RobotObservation, RobotObservation](
|
||||
steps=[
|
||||
ForwardKinematicsJointsToEE(kinematics=kinematics_solver, motor_names=list(robot.bus.motors.keys()))
|
||||
],
|
||||
to_transition=observation_to_transition,
|
||||
to_output=transition_to_observation,
|
||||
)
|
||||
|
||||
# Create the dataset
|
||||
dataset = LeRobotDataset.create(
|
||||
repo_id=HF_REPO_ID,
|
||||
fps=FPS,
|
||||
features=combine_feature_dicts(
|
||||
# Run the feature contract of the pipelines
|
||||
# This tells you how the features would look like after the pipeline steps
|
||||
aggregate_pipeline_dataset_features(
|
||||
pipeline=phone_to_robot_ee_pose_processor,
|
||||
initial_features=create_initial_features(action=phone.action_features),
|
||||
use_videos=True,
|
||||
),
|
||||
aggregate_pipeline_dataset_features(
|
||||
pipeline=robot_joints_to_ee_pose,
|
||||
initial_features=create_initial_features(observation=robot.observation_features),
|
||||
use_videos=True,
|
||||
),
|
||||
),
|
||||
robot_type=robot.name,
|
||||
use_videos=True,
|
||||
image_writer_threads=4,
|
||||
)
|
||||
|
||||
# Connect the robot and teleoperator
|
||||
robot.connect()
|
||||
phone.connect()
|
||||
|
||||
# Initialize the keyboard listener and rerun visualization
|
||||
listener, events = init_keyboard_listener()
|
||||
_init_rerun(session_name="phone_so100_record")
|
||||
|
||||
if not robot.is_connected or not phone.is_connected:
|
||||
raise ValueError("Robot or teleop is not connected!")
|
||||
|
||||
|
||||
print("Starting record loop. Move your phone to teleoperate the robot...")
|
||||
episode_idx = 0
|
||||
while episode_idx < NUM_EPISODES and not events["stop_recording"]:
|
||||
log_say(f"Recording episode {episode_idx + 1} of {NUM_EPISODES}")
|
||||
|
||||
# Main record loop
|
||||
record_loop(
|
||||
robot=robot,
|
||||
events=events,
|
||||
fps=FPS,
|
||||
teleop=phone,
|
||||
dataset=dataset,
|
||||
control_time_s=EPISODE_TIME_SEC,
|
||||
single_task=TASK_DESCRIPTION,
|
||||
display_data=True,
|
||||
teleop_action_processor=phone_to_robot_ee_pose_processor,
|
||||
robot_action_processor=robot_ee_to_joints_processor,
|
||||
robot_observation_processor=robot_joints_to_ee_pose,
|
||||
)
|
||||
|
||||
# Reset the environment if not stopping or re-recording
|
||||
if not events["stop_recording"] and (episode_idx < NUM_EPISODES - 1 or events["rerecord_episode"]):
|
||||
log_say("Reset the environment")
|
||||
record_loop(
|
||||
robot=robot,
|
||||
events=events,
|
||||
fps=FPS,
|
||||
teleop=phone,
|
||||
control_time_s=RESET_TIME_SEC,
|
||||
single_task=TASK_DESCRIPTION,
|
||||
display_data=True,
|
||||
teleop_action_processor=phone_to_robot_ee_pose_processor,
|
||||
robot_action_processor=robot_ee_to_joints_processor,
|
||||
robot_observation_processor=robot_joints_to_ee_pose,
|
||||
)
|
||||
|
||||
if events["rerecord_episode"]:
|
||||
log_say("Re-recording episode")
|
||||
events["rerecord_episode"] = False
|
||||
events["exit_early"] = False
|
||||
dataset.clear_episode_buffer()
|
||||
continue
|
||||
|
||||
# Save episode
|
||||
dataset.save_episode()
|
||||
episode_idx += 1
|
||||
|
||||
# Clean up
|
||||
log_say("Stop recording")
|
||||
robot.disconnect()
|
||||
phone.disconnect()
|
||||
listener.stop()
|
||||
dataset.push_to_hub()
|
||||
@@ -0,0 +1,99 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import time
|
||||
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
from lerobot.model.kinematics import RobotKinematics
|
||||
from lerobot.processor import RobotAction, RobotObservation, RobotProcessorPipeline
|
||||
from lerobot.processor.converters import (
|
||||
robot_action_observation_to_transition,
|
||||
transition_to_robot_action,
|
||||
)
|
||||
from lerobot.robots.so100_follower.config_so100_follower import SO100FollowerConfig
|
||||
from lerobot.robots.so100_follower.robot_kinematic_processor import (
|
||||
InverseKinematicsEEToJoints,
|
||||
)
|
||||
from lerobot.robots.so100_follower.so100_follower import SO100Follower
|
||||
from lerobot.utils.robot_utils import busy_wait
|
||||
from lerobot.utils.utils import log_say
|
||||
|
||||
EPISODE_IDX = 0
|
||||
HF_REPO_ID = "<hf_username>/<dataset_repo_id>"
|
||||
|
||||
# Initialize the robot config
|
||||
robot_config = SO100FollowerConfig(
|
||||
port="/dev/tty.usbmodem5A460814411", id="my_awesome_follower_arm", use_degrees=True
|
||||
)
|
||||
|
||||
# Initialize the robot
|
||||
robot = SO100Follower(robot_config)
|
||||
|
||||
# NOTE: It is highly recommended to use the urdf in the SO-ARM100 repo: https://github.com/TheRobotStudio/SO-ARM100/blob/main/Simulation/SO101/so101_new_calib.urdf
|
||||
kinematics_solver = RobotKinematics(
|
||||
urdf_path="./SO101/so101_new_calib.urdf",
|
||||
target_frame_name="gripper_frame_link",
|
||||
joint_names=list(robot.bus.motors.keys()),
|
||||
)
|
||||
|
||||
# Build pipeline to convert EE action to joints action
|
||||
robot_ee_to_joints_processor = RobotProcessorPipeline[tuple[RobotAction, RobotObservation], RobotAction](
|
||||
steps=[
|
||||
InverseKinematicsEEToJoints(
|
||||
kinematics=kinematics_solver,
|
||||
motor_names=list(robot.bus.motors.keys()),
|
||||
initial_guess_current_joints=False, # Because replay is open loop
|
||||
),
|
||||
],
|
||||
to_transition=robot_action_observation_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
|
||||
# Fetch the dataset to replay
|
||||
dataset = LeRobotDataset(HF_REPO_ID, episodes=[EPISODE_IDX])
|
||||
# Filter dataset to only include frames from the specified episode since episodes are chunked in dataset V3.0
|
||||
episode_frames = dataset.hf_dataset.filter(lambda x: x["episode_index"] == EPISODE_IDX)
|
||||
actions = episode_frames.select_columns("action")
|
||||
|
||||
# Connect to the robot
|
||||
robot.connect()
|
||||
|
||||
if not robot.is_connected:
|
||||
raise ValueError("Robot is not connected!")
|
||||
|
||||
print("Starting replay loop...")
|
||||
log_say(f"Replaying episode {EPISODE_IDX}")
|
||||
for idx in range(len(episode_frames)):
|
||||
t0 = time.perf_counter()
|
||||
|
||||
# Get recorded action from dataset
|
||||
ee_action = {
|
||||
name: float(actions[idx]["action"][i]) for i, name in enumerate(dataset.features["action"]["names"])
|
||||
}
|
||||
|
||||
# Get robot observation
|
||||
robot_obs = robot.get_observation()
|
||||
|
||||
# Dataset EE -> robot joints
|
||||
joint_action = robot_ee_to_joints_processor((ee_action, robot_obs))
|
||||
|
||||
# Send action to robot
|
||||
_ = robot.send_action(joint_action)
|
||||
|
||||
busy_wait(1.0 / dataset.fps - (time.perf_counter() - t0))
|
||||
|
||||
# Clean up
|
||||
robot.disconnect()
|
||||
@@ -0,0 +1,114 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specif
|
||||
|
||||
import time
|
||||
|
||||
from lerobot.model.kinematics import RobotKinematics
|
||||
from lerobot.processor import RobotAction, RobotObservation, RobotProcessorPipeline
|
||||
from lerobot.processor.converters import (
|
||||
robot_action_observation_to_transition,
|
||||
transition_to_robot_action,
|
||||
)
|
||||
from lerobot.robots.so100_follower.config_so100_follower import SO100FollowerConfig
|
||||
from lerobot.robots.so100_follower.robot_kinematic_processor import (
|
||||
EEBoundsAndSafety,
|
||||
EEReferenceAndDelta,
|
||||
GripperVelocityToJoint,
|
||||
InverseKinematicsEEToJoints,
|
||||
)
|
||||
from lerobot.robots.so100_follower.so100_follower import SO100Follower
|
||||
from lerobot.teleoperators.phone.config_phone import PhoneConfig, PhoneOS
|
||||
from lerobot.teleoperators.phone.phone_processor import MapPhoneActionToRobotAction
|
||||
from lerobot.teleoperators.phone.teleop_phone import Phone
|
||||
from lerobot.utils.robot_utils import busy_wait
|
||||
from lerobot.utils.visualization_utils import _init_rerun, log_rerun_data
|
||||
|
||||
FPS = 30
|
||||
|
||||
# Initialize the robot and teleoperator
|
||||
robot_config = SO100FollowerConfig(
|
||||
port="/dev/tty.usbmodem5A460814411", id="my_awesome_follower_arm", use_degrees=True
|
||||
)
|
||||
teleop_config = PhoneConfig(phone_os=PhoneOS.IOS) # or PhoneOS.ANDROID
|
||||
|
||||
# Initialize the robot and teleoperator
|
||||
robot = SO100Follower(robot_config)
|
||||
teleop_device = Phone(teleop_config)
|
||||
|
||||
# NOTE: It is highly recommended to use the urdf in the SO-ARM100 repo: https://github.com/TheRobotStudio/SO-ARM100/blob/main/Simulation/SO101/so101_new_calib.urdf
|
||||
kinematics_solver = RobotKinematics(
|
||||
urdf_path="./SO101/so101_new_calib.urdf",
|
||||
target_frame_name="gripper_frame_link",
|
||||
joint_names=list(robot.bus.motors.keys()),
|
||||
)
|
||||
|
||||
# Build pipeline to convert phone action to ee pose action to joint action
|
||||
phone_to_robot_joints_processor = RobotProcessorPipeline[tuple[RobotAction, RobotObservation], RobotAction](
|
||||
steps=[
|
||||
MapPhoneActionToRobotAction(platform=teleop_config.phone_os),
|
||||
EEReferenceAndDelta(
|
||||
kinematics=kinematics_solver,
|
||||
end_effector_step_sizes={"x": 0.5, "y": 0.5, "z": 0.5},
|
||||
motor_names=list(robot.bus.motors.keys()),
|
||||
use_latched_reference=True,
|
||||
),
|
||||
EEBoundsAndSafety(
|
||||
end_effector_bounds={"min": [-1.0, -1.0, -1.0], "max": [1.0, 1.0, 1.0]},
|
||||
max_ee_step_m=0.10,
|
||||
max_ee_twist_step_rad=0.50,
|
||||
),
|
||||
GripperVelocityToJoint(
|
||||
speed_factor=20.0,
|
||||
),
|
||||
InverseKinematicsEEToJoints(
|
||||
kinematics=kinematics_solver,
|
||||
motor_names=list(robot.bus.motors.keys()),
|
||||
initial_guess_current_joints=True,
|
||||
),
|
||||
],
|
||||
to_transition=robot_action_observation_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
|
||||
# Connect to the robot and teleoperator
|
||||
robot.connect()
|
||||
teleop_device.connect()
|
||||
|
||||
# Init rerun viewer
|
||||
_init_rerun(session_name="phone_so100_teleop")
|
||||
|
||||
if not robot.is_connected or not teleop_device.is_connected:
|
||||
raise ValueError("Robot or teleop is not connected!")
|
||||
|
||||
print("Starting teleop loop. Move your phone to teleoperate the robot...")
|
||||
while True:
|
||||
t0 = time.perf_counter()
|
||||
|
||||
# Get robot observation
|
||||
robot_obs = robot.get_observation()
|
||||
|
||||
# Get teleop action
|
||||
phone_obs = teleop_device.get_action()
|
||||
|
||||
# Phone -> EE pose -> Joints transition
|
||||
joint_action = phone_to_robot_joints_processor((phone_obs, robot_obs))
|
||||
|
||||
# Send action to robot
|
||||
_ = robot.send_action(joint_action)
|
||||
|
||||
# Visualize
|
||||
log_rerun_data(observation=phone_obs, action=joint_action)
|
||||
|
||||
busy_wait(max(1.0 / FPS - (time.perf_counter() - t0), 0.0))
|
||||
@@ -0,0 +1,85 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import argparse
|
||||
import json
|
||||
from pathlib import Path
|
||||
|
||||
|
||||
def find_missing_workers(completions_dir, world_size):
|
||||
"""Find workers that are not completed and returns their indices."""
|
||||
full = list(range(world_size))
|
||||
|
||||
completed = []
|
||||
for path in completions_dir.glob("*"):
|
||||
if path.name in [".", ".."]:
|
||||
continue
|
||||
index = path.name.lstrip("0")
|
||||
index = 0 if index == "" else int(index)
|
||||
completed.append(index)
|
||||
|
||||
missing_workers = set(full) - set(completed)
|
||||
return missing_workers
|
||||
|
||||
|
||||
def find_output_files(slurm_dir, worker_indices):
|
||||
"""Find output files associated to worker indices, and return tuples
|
||||
of (worker index, output file path)
|
||||
"""
|
||||
out_files = []
|
||||
for path in slurm_dir.glob("*.out"):
|
||||
_, worker_id = path.name.replace(".out", "").split("_")
|
||||
worker_id = int(worker_id)
|
||||
if worker_id in worker_indices:
|
||||
out_files.append((worker_id, path))
|
||||
return out_files
|
||||
|
||||
|
||||
def display_error_files(logs_dir, job_name):
|
||||
executor_path = Path(logs_dir) / job_name / "executor.json"
|
||||
completions_dir = Path(logs_dir) / job_name / "completions"
|
||||
|
||||
with open(executor_path) as f:
|
||||
executor = json.load(f)
|
||||
|
||||
missing_workers = find_missing_workers(completions_dir, executor["world_size"])
|
||||
|
||||
for missing in sorted(missing_workers)[::-1]:
|
||||
print(missing)
|
||||
|
||||
|
||||
def main():
|
||||
parser = argparse.ArgumentParser()
|
||||
|
||||
parser.add_argument(
|
||||
"--logs-dir",
|
||||
type=str,
|
||||
help="Path to logs directory for `datatrove`.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--job-name",
|
||||
type=str,
|
||||
default="port_droid",
|
||||
help="Job name used in slurm, and name of the directory created inside the provided logs directory.",
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
|
||||
display_error_files(**vars(args))
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
main()
|
||||
@@ -0,0 +1,430 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import argparse
|
||||
import logging
|
||||
import time
|
||||
from pathlib import Path
|
||||
|
||||
import numpy as np
|
||||
import tensorflow_datasets as tfds
|
||||
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset, LeRobotDatasetMetadata
|
||||
from lerobot.utils.utils import get_elapsed_time_in_days_hours_minutes_seconds
|
||||
|
||||
DROID_SHARDS = 2048
|
||||
DROID_FPS = 15
|
||||
DROID_ROBOT_TYPE = "Franka"
|
||||
|
||||
# Dataset schema slightly adapted from: https://droid-dataset.github.io/droid/the-droid-dataset.html#-dataset-schema
|
||||
DROID_FEATURES = {
|
||||
# true on first step of the episode
|
||||
"is_first": {
|
||||
"dtype": "bool",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
},
|
||||
# true on last step of the episode
|
||||
"is_last": {
|
||||
"dtype": "bool",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
},
|
||||
# true on last step of the episode if it is a terminal step, True for demos
|
||||
"is_terminal": {
|
||||
"dtype": "bool",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
},
|
||||
# language_instruction is also stored as "task" to follow LeRobot standard
|
||||
"language_instruction": {
|
||||
"dtype": "string",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
},
|
||||
"language_instruction_2": {
|
||||
"dtype": "string",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
},
|
||||
"language_instruction_3": {
|
||||
"dtype": "string",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
},
|
||||
"observation.state.gripper_position": {
|
||||
"dtype": "float32",
|
||||
"shape": (1,),
|
||||
"names": {
|
||||
"axes": ["gripper"],
|
||||
},
|
||||
},
|
||||
"observation.state.cartesian_position": {
|
||||
"dtype": "float32",
|
||||
"shape": (6,),
|
||||
"names": {
|
||||
"axes": ["x", "y", "z", "roll", "pitch", "yaw"],
|
||||
},
|
||||
},
|
||||
"observation.state.joint_position": {
|
||||
"dtype": "float32",
|
||||
"shape": (7,),
|
||||
"names": {
|
||||
"axes": ["joint_0", "joint_1", "joint_2", "joint_3", "joint_4", "joint_5", "joint_6"],
|
||||
},
|
||||
},
|
||||
# Add this new feature to follow LeRobot standard of using joint position + gripper
|
||||
"observation.state": {
|
||||
"dtype": "float32",
|
||||
"shape": (8,),
|
||||
"names": {
|
||||
"axes": ["joint_0", "joint_1", "joint_2", "joint_3", "joint_4", "joint_5", "joint_6", "gripper"],
|
||||
},
|
||||
},
|
||||
# Initially called wrist_image_left
|
||||
"observation.images.wrist_left": {
|
||||
"dtype": "video",
|
||||
"shape": (180, 320, 3),
|
||||
"names": [
|
||||
"height",
|
||||
"width",
|
||||
"channels",
|
||||
],
|
||||
},
|
||||
# Initially called exterior_image_1_left
|
||||
"observation.images.exterior_1_left": {
|
||||
"dtype": "video",
|
||||
"shape": (180, 320, 3),
|
||||
"names": [
|
||||
"height",
|
||||
"width",
|
||||
"channels",
|
||||
],
|
||||
},
|
||||
# Initially called exterior_image_2_left
|
||||
"observation.images.exterior_2_left": {
|
||||
"dtype": "video",
|
||||
"shape": (180, 320, 3),
|
||||
"names": [
|
||||
"height",
|
||||
"width",
|
||||
"channels",
|
||||
],
|
||||
},
|
||||
"action.gripper_position": {
|
||||
"dtype": "float32",
|
||||
"shape": (1,),
|
||||
"names": {
|
||||
"axes": ["gripper"],
|
||||
},
|
||||
},
|
||||
"action.gripper_velocity": {
|
||||
"dtype": "float32",
|
||||
"shape": (1,),
|
||||
"names": {
|
||||
"axes": ["gripper"],
|
||||
},
|
||||
},
|
||||
"action.cartesian_position": {
|
||||
"dtype": "float32",
|
||||
"shape": (6,),
|
||||
"names": {
|
||||
"axes": ["x", "y", "z", "roll", "pitch", "yaw"],
|
||||
},
|
||||
},
|
||||
"action.cartesian_velocity": {
|
||||
"dtype": "float32",
|
||||
"shape": (6,),
|
||||
"names": {
|
||||
"axes": ["x", "y", "z", "roll", "pitch", "yaw"],
|
||||
},
|
||||
},
|
||||
"action.joint_position": {
|
||||
"dtype": "float32",
|
||||
"shape": (7,),
|
||||
"names": {
|
||||
"axes": ["joint_0", "joint_1", "joint_2", "joint_3", "joint_4", "joint_5", "joint_6"],
|
||||
},
|
||||
},
|
||||
"action.joint_velocity": {
|
||||
"dtype": "float32",
|
||||
"shape": (7,),
|
||||
"names": {
|
||||
"axes": ["joint_0", "joint_1", "joint_2", "joint_3", "joint_4", "joint_5", "joint_6"],
|
||||
},
|
||||
},
|
||||
# This feature was called "action" in RLDS dataset and consists of [6x joint velocities, 1x gripper position]
|
||||
"action.original": {
|
||||
"dtype": "float32",
|
||||
"shape": (7,),
|
||||
"names": {
|
||||
"axes": ["x", "y", "z", "roll", "pitch", "yaw", "gripper"],
|
||||
},
|
||||
},
|
||||
# Add this new feature to follow LeRobot standard of using joint position + gripper
|
||||
"action": {
|
||||
"dtype": "float32",
|
||||
"shape": (8,),
|
||||
"names": {
|
||||
"axes": ["joint_0", "joint_1", "joint_2", "joint_3", "joint_4", "joint_5", "joint_6", "gripper"],
|
||||
},
|
||||
},
|
||||
"discount": {
|
||||
"dtype": "float32",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
},
|
||||
"reward": {
|
||||
"dtype": "float32",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
},
|
||||
# Meta data that are the same for all frames in the episode
|
||||
"task_category": {
|
||||
"dtype": "string",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
},
|
||||
"building": {
|
||||
"dtype": "string",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
},
|
||||
"collector_id": {
|
||||
"dtype": "string",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
},
|
||||
"date": {
|
||||
"dtype": "string",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
},
|
||||
"camera_extrinsics.wrist_left": {
|
||||
"dtype": "float32",
|
||||
"shape": (6,),
|
||||
"names": {
|
||||
"axes": ["x", "y", "z", "roll", "pitch", "yaw"],
|
||||
},
|
||||
},
|
||||
"camera_extrinsics.exterior_1_left": {
|
||||
"dtype": "float32",
|
||||
"shape": (6,),
|
||||
"names": {
|
||||
"axes": ["x", "y", "z", "roll", "pitch", "yaw"],
|
||||
},
|
||||
},
|
||||
"camera_extrinsics.exterior_2_left": {
|
||||
"dtype": "float32",
|
||||
"shape": (6,),
|
||||
"names": {
|
||||
"axes": ["x", "y", "z", "roll", "pitch", "yaw"],
|
||||
},
|
||||
},
|
||||
"is_episode_successful": {
|
||||
"dtype": "bool",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
},
|
||||
}
|
||||
|
||||
|
||||
def is_episode_successful(tf_episode_metadata):
|
||||
# Adapted from: https://github.com/droid-dataset/droid_policy_learning/blob/dd1020eb20d981f90b5ff07dc80d80d5c0cb108b/robomimic/utils/rlds_utils.py#L8
|
||||
return "/success/" in tf_episode_metadata["file_path"].numpy().decode()
|
||||
|
||||
|
||||
def generate_lerobot_frames(tf_episode):
|
||||
m = tf_episode["episode_metadata"]
|
||||
frame_meta = {
|
||||
"task_category": m["building"].numpy().decode(),
|
||||
"building": m["building"].numpy().decode(),
|
||||
"collector_id": m["collector_id"].numpy().decode(),
|
||||
"date": m["date"].numpy().decode(),
|
||||
"camera_extrinsics.wrist_left": m["extrinsics_wrist_cam"].numpy(),
|
||||
"camera_extrinsics.exterior_1_left": m["extrinsics_exterior_cam_1"].numpy(),
|
||||
"camera_extrinsics.exterior_2_left": m["extrinsics_exterior_cam_2"].numpy(),
|
||||
"is_episode_successful": np.array([is_episode_successful(m)]),
|
||||
}
|
||||
for f in tf_episode["steps"]:
|
||||
# Dataset schema slightly adapted from: https://droid-dataset.github.io/droid/the-droid-dataset.html#-dataset-schema
|
||||
frame = {
|
||||
"is_first": np.array([f["is_first"].numpy()]),
|
||||
"is_last": np.array([f["is_last"].numpy()]),
|
||||
"is_terminal": np.array([f["is_terminal"].numpy()]),
|
||||
"language_instruction": f["language_instruction"].numpy().decode(),
|
||||
"language_instruction_2": f["language_instruction_2"].numpy().decode(),
|
||||
"language_instruction_3": f["language_instruction_3"].numpy().decode(),
|
||||
"observation.state.gripper_position": f["observation"]["gripper_position"].numpy(),
|
||||
"observation.state.cartesian_position": f["observation"]["cartesian_position"].numpy(),
|
||||
"observation.state.joint_position": f["observation"]["joint_position"].numpy(),
|
||||
"observation.images.wrist_left": f["observation"]["wrist_image_left"].numpy(),
|
||||
"observation.images.exterior_1_left": f["observation"]["exterior_image_1_left"].numpy(),
|
||||
"observation.images.exterior_2_left": f["observation"]["exterior_image_2_left"].numpy(),
|
||||
"action.gripper_position": f["action_dict"]["gripper_position"].numpy(),
|
||||
"action.gripper_velocity": f["action_dict"]["gripper_velocity"].numpy(),
|
||||
"action.cartesian_position": f["action_dict"]["cartesian_position"].numpy(),
|
||||
"action.cartesian_velocity": f["action_dict"]["cartesian_velocity"].numpy(),
|
||||
"action.joint_position": f["action_dict"]["joint_position"].numpy(),
|
||||
"action.joint_velocity": f["action_dict"]["joint_velocity"].numpy(),
|
||||
"discount": np.array([f["discount"].numpy()]),
|
||||
"reward": np.array([f["reward"].numpy()]),
|
||||
"action.original": f["action"].numpy(),
|
||||
}
|
||||
|
||||
# language_instruction is also stored as "task" to follow LeRobot standard
|
||||
frame["task"] = frame["language_instruction"]
|
||||
|
||||
# Add this new feature to follow LeRobot standard of using joint position + gripper
|
||||
frame["observation.state"] = np.concatenate(
|
||||
[frame["observation.state.joint_position"], frame["observation.state.gripper_position"]]
|
||||
)
|
||||
frame["action"] = np.concatenate([frame["action.joint_position"], frame["action.gripper_position"]])
|
||||
|
||||
# Meta data that are the same for all frames in the episode
|
||||
frame.update(frame_meta)
|
||||
|
||||
# Cast fp64 to fp32
|
||||
for key in frame:
|
||||
if isinstance(frame[key], np.ndarray) and frame[key].dtype == np.float64:
|
||||
frame[key] = frame[key].astype(np.float32)
|
||||
|
||||
yield frame
|
||||
|
||||
|
||||
def port_droid(
|
||||
raw_dir: Path,
|
||||
repo_id: str,
|
||||
push_to_hub: bool = False,
|
||||
num_shards: int | None = None,
|
||||
shard_index: int | None = None,
|
||||
):
|
||||
dataset_name = raw_dir.parent.name
|
||||
version = raw_dir.name
|
||||
data_dir = raw_dir.parent.parent
|
||||
|
||||
builder = tfds.builder(f"{dataset_name}/{version}", data_dir=data_dir, version="")
|
||||
|
||||
if num_shards is not None:
|
||||
tfds_num_shards = builder.info.splits["train"].num_shards
|
||||
if tfds_num_shards != DROID_SHARDS:
|
||||
raise ValueError(
|
||||
f"Number of shards of Droid dataset is expected to be {DROID_SHARDS} but is {tfds_num_shards}."
|
||||
)
|
||||
if num_shards != tfds_num_shards:
|
||||
raise ValueError(
|
||||
f"We only shard over the fixed number of shards provided by tensorflow dataset ({tfds_num_shards}), but {num_shards} shards provided instead."
|
||||
)
|
||||
if shard_index >= tfds_num_shards:
|
||||
raise ValueError(
|
||||
f"Shard index is greater than the num of shards ({shard_index} >= {num_shards})."
|
||||
)
|
||||
|
||||
raw_dataset = builder.as_dataset(split=f"train[{shard_index}shard]")
|
||||
else:
|
||||
raw_dataset = builder.as_dataset(split="train")
|
||||
|
||||
lerobot_dataset = LeRobotDataset.create(
|
||||
repo_id=repo_id,
|
||||
robot_type=DROID_ROBOT_TYPE,
|
||||
fps=DROID_FPS,
|
||||
features=DROID_FEATURES,
|
||||
)
|
||||
|
||||
start_time = time.time()
|
||||
num_episodes = raw_dataset.cardinality().numpy().item()
|
||||
logging.info(f"Number of episodes {num_episodes}")
|
||||
|
||||
for episode_index, episode in enumerate(raw_dataset):
|
||||
elapsed_time = time.time() - start_time
|
||||
d, h, m, s = get_elapsed_time_in_days_hours_minutes_seconds(elapsed_time)
|
||||
|
||||
logging.info(
|
||||
f"{episode_index} / {num_episodes} episodes processed (after {d} days, {h} hours, {m} minutes, {s:.3f} seconds)"
|
||||
)
|
||||
|
||||
for frame in generate_lerobot_frames(episode):
|
||||
lerobot_dataset.add_frame(frame)
|
||||
|
||||
lerobot_dataset.save_episode()
|
||||
logging.info("Save_episode")
|
||||
|
||||
if push_to_hub:
|
||||
lerobot_dataset.push_to_hub(
|
||||
# Add openx tag, since it belongs to the openx collection of datasets
|
||||
tags=["openx"],
|
||||
private=False,
|
||||
)
|
||||
|
||||
|
||||
def validate_dataset(repo_id):
|
||||
"""Sanity check that ensure meta data can be loaded and all files are present."""
|
||||
meta = LeRobotDatasetMetadata(repo_id)
|
||||
|
||||
if meta.total_episodes == 0:
|
||||
raise ValueError("Number of episodes is 0.")
|
||||
|
||||
for ep_idx in range(meta.total_episodes):
|
||||
data_path = meta.root / meta.get_data_file_path(ep_idx)
|
||||
|
||||
if not data_path.exists():
|
||||
raise ValueError(f"Parquet file is missing in: {data_path}")
|
||||
|
||||
for vid_key in meta.video_keys:
|
||||
vid_path = meta.root / meta.get_video_file_path(ep_idx, vid_key)
|
||||
if not vid_path.exists():
|
||||
raise ValueError(f"Video file is missing in: {vid_path}")
|
||||
|
||||
|
||||
def main():
|
||||
parser = argparse.ArgumentParser()
|
||||
|
||||
parser.add_argument(
|
||||
"--raw-dir",
|
||||
type=Path,
|
||||
required=True,
|
||||
help="Directory containing input raw datasets (e.g. `path/to/dataset` or `path/to/dataset/version).",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--repo-id",
|
||||
type=str,
|
||||
help="Repositery identifier on Hugging Face: a community or a user name `/` the name of the dataset, required when push-to-hub is True",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--push-to-hub",
|
||||
action="store_true",
|
||||
help="Upload to hub.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--num-shards",
|
||||
type=int,
|
||||
default=None,
|
||||
help="Number of shards. Can be either None to load the full dataset, or 2048 to load one of the 2048 tensorflow dataset files.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--shard-index",
|
||||
type=int,
|
||||
default=None,
|
||||
help="Index of the shard. Can be either None to load the full dataset, or in [0,2047] to load one of the 2048 tensorflow dataset files.",
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
|
||||
port_droid(**vars(args))
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
main()
|
||||
@@ -0,0 +1,148 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import argparse
|
||||
import logging
|
||||
from pathlib import Path
|
||||
|
||||
from datatrove.executor import LocalPipelineExecutor
|
||||
from datatrove.executor.slurm import SlurmPipelineExecutor
|
||||
from datatrove.pipeline.base import PipelineStep
|
||||
from port_datasets.droid_rlds.port_droid import DROID_SHARDS
|
||||
|
||||
from lerobot.datasets.aggregate import aggregate_datasets
|
||||
from lerobot.utils.utils import init_logging
|
||||
|
||||
|
||||
class AggregateDatasets(PipelineStep):
|
||||
def __init__(
|
||||
self,
|
||||
repo_ids: list[str],
|
||||
aggregated_repo_id: str,
|
||||
):
|
||||
super().__init__()
|
||||
self.repo_ids = repo_ids
|
||||
self.aggr_repo_id = aggregated_repo_id
|
||||
|
||||
def run(self, data=None, rank: int = 0, world_size: int = 1):
|
||||
init_logging()
|
||||
|
||||
# Since aggregate_datasets already handles parallel processing internally,
|
||||
# we only need one worker to run the entire aggregation
|
||||
if rank == 0:
|
||||
logging.info(f"Starting aggregation of {len(self.repo_ids)} datasets into {self.aggr_repo_id}")
|
||||
aggregate_datasets(self.repo_ids, self.aggr_repo_id)
|
||||
logging.info("Aggregation complete!")
|
||||
else:
|
||||
logging.info(f"Worker {rank} skipping - only worker 0 performs aggregation")
|
||||
|
||||
|
||||
def make_aggregate_executor(
|
||||
repo_ids, repo_id, job_name, logs_dir, workers, partition, cpus_per_task, mem_per_cpu, slurm=True
|
||||
):
|
||||
kwargs = {
|
||||
"pipeline": [
|
||||
AggregateDatasets(repo_ids, repo_id),
|
||||
],
|
||||
"logging_dir": str(logs_dir / job_name),
|
||||
}
|
||||
|
||||
if slurm:
|
||||
# For aggregation, we only need 1 task since aggregate_datasets handles everything
|
||||
kwargs.update(
|
||||
{
|
||||
"job_name": job_name,
|
||||
"tasks": 1, # Only need 1 task for aggregation
|
||||
"workers": 1, # Only need 1 worker
|
||||
"time": "08:00:00",
|
||||
"partition": partition,
|
||||
"cpus_per_task": cpus_per_task,
|
||||
"sbatch_args": {"mem-per-cpu": mem_per_cpu},
|
||||
}
|
||||
)
|
||||
executor = SlurmPipelineExecutor(**kwargs)
|
||||
else:
|
||||
kwargs.update(
|
||||
{
|
||||
"tasks": 1,
|
||||
"workers": 1,
|
||||
}
|
||||
)
|
||||
executor = LocalPipelineExecutor(**kwargs)
|
||||
|
||||
return executor
|
||||
|
||||
|
||||
def main():
|
||||
parser = argparse.ArgumentParser()
|
||||
|
||||
parser.add_argument(
|
||||
"--repo-id",
|
||||
type=str,
|
||||
help="Repository identifier on Hugging Face: a community or a user name `/` the name of the dataset, required when push-to-hub is True.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--logs-dir",
|
||||
type=Path,
|
||||
help="Path to logs directory for `datatrove`.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--job-name",
|
||||
type=str,
|
||||
default="aggr_droid",
|
||||
help="Job name used in slurm, and name of the directory created inside the provided logs directory.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--slurm",
|
||||
type=int,
|
||||
default=1,
|
||||
help="Launch over slurm. Use `--slurm 0` to launch sequentially (useful to debug).",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--workers",
|
||||
type=int,
|
||||
default=1, # Changed default to 1 since aggregation doesn't need multiple workers
|
||||
help="Number of slurm workers. For aggregation, this should be 1.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--partition",
|
||||
type=str,
|
||||
help="Slurm partition. Ideally a CPU partition. No need for GPU partition.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--cpus-per-task",
|
||||
type=int,
|
||||
default=8,
|
||||
help="Number of cpus that each slurm worker will use.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--mem-per-cpu",
|
||||
type=str,
|
||||
default="1950M",
|
||||
help="Memory per cpu that each worker will use.",
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
kwargs = vars(args)
|
||||
kwargs["slurm"] = kwargs.pop("slurm") == 1
|
||||
|
||||
repo_ids = [f"{args.repo_id}_world_{DROID_SHARDS}_rank_{rank}" for rank in range(DROID_SHARDS)]
|
||||
aggregate_executor = make_aggregate_executor(repo_ids, **kwargs)
|
||||
aggregate_executor.run()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
main()
|
||||
@@ -0,0 +1,162 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import argparse
|
||||
from pathlib import Path
|
||||
|
||||
from datatrove.executor import LocalPipelineExecutor
|
||||
from datatrove.executor.slurm import SlurmPipelineExecutor
|
||||
from datatrove.pipeline.base import PipelineStep
|
||||
from port_datasets.droid_rlds.port_droid import DROID_SHARDS
|
||||
|
||||
|
||||
class PortDroidShards(PipelineStep):
|
||||
def __init__(
|
||||
self,
|
||||
raw_dir: Path | str,
|
||||
repo_id: str = None,
|
||||
):
|
||||
super().__init__()
|
||||
self.raw_dir = Path(raw_dir)
|
||||
self.repo_id = repo_id
|
||||
|
||||
def run(self, data=None, rank: int = 0, world_size: int = 1):
|
||||
from datasets.utils.tqdm import disable_progress_bars
|
||||
from port_datasets.droid_rlds.port_droid import port_droid, validate_dataset
|
||||
|
||||
from lerobot.utils.utils import init_logging
|
||||
|
||||
init_logging()
|
||||
disable_progress_bars()
|
||||
|
||||
shard_repo_id = f"{self.repo_id}_world_{world_size}_rank_{rank}"
|
||||
|
||||
try:
|
||||
validate_dataset(shard_repo_id)
|
||||
return
|
||||
except Exception:
|
||||
pass # nosec B110 - Dataset doesn't exist yet, continue with porting
|
||||
|
||||
port_droid(
|
||||
self.raw_dir,
|
||||
shard_repo_id,
|
||||
push_to_hub=False,
|
||||
num_shards=world_size,
|
||||
shard_index=rank,
|
||||
)
|
||||
|
||||
validate_dataset(shard_repo_id)
|
||||
|
||||
|
||||
def make_port_executor(
|
||||
raw_dir, repo_id, job_name, logs_dir, workers, partition, cpus_per_task, mem_per_cpu, slurm=True
|
||||
):
|
||||
kwargs = {
|
||||
"pipeline": [
|
||||
PortDroidShards(raw_dir, repo_id),
|
||||
],
|
||||
"logging_dir": str(logs_dir / job_name),
|
||||
}
|
||||
|
||||
if slurm:
|
||||
kwargs.update(
|
||||
{
|
||||
"job_name": job_name,
|
||||
"tasks": DROID_SHARDS,
|
||||
"workers": workers,
|
||||
"time": "08:00:00",
|
||||
"partition": partition,
|
||||
"cpus_per_task": cpus_per_task,
|
||||
"sbatch_args": {"mem-per-cpu": mem_per_cpu},
|
||||
}
|
||||
)
|
||||
executor = SlurmPipelineExecutor(**kwargs)
|
||||
else:
|
||||
kwargs.update(
|
||||
{
|
||||
"tasks": 1,
|
||||
"workers": 1,
|
||||
}
|
||||
)
|
||||
executor = LocalPipelineExecutor(**kwargs)
|
||||
|
||||
return executor
|
||||
|
||||
|
||||
def main():
|
||||
parser = argparse.ArgumentParser()
|
||||
|
||||
parser.add_argument(
|
||||
"--raw-dir",
|
||||
type=Path,
|
||||
required=True,
|
||||
help="Directory containing input raw datasets (e.g. `path/to/dataset` or `path/to/dataset/version).",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--repo-id",
|
||||
type=str,
|
||||
help="Repositery identifier on Hugging Face: a community or a user name `/` the name of the dataset, required when push-to-hub is True.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--logs-dir",
|
||||
type=Path,
|
||||
help="Path to logs directory for `datatrove`.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--job-name",
|
||||
type=str,
|
||||
default="port_droid",
|
||||
help="Job name used in slurm, and name of the directory created inside the provided logs directory.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--slurm",
|
||||
type=int,
|
||||
default=1,
|
||||
help="Launch over slurm. Use `--slurm 0` to launch sequentially (useful to debug).",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--workers",
|
||||
type=int,
|
||||
default=2048,
|
||||
help="Number of slurm workers. It should be less than the maximum number of shards.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--partition",
|
||||
type=str,
|
||||
help="Slurm partition. Ideally a CPU partition. No need for GPU partition.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--cpus-per-task",
|
||||
type=int,
|
||||
default=8,
|
||||
help="Number of cpus that each slurm worker will use.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--mem-per-cpu",
|
||||
type=str,
|
||||
default="1950M",
|
||||
help="Memory per cpu that each worker will use.",
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
kwargs = vars(args)
|
||||
kwargs["slurm"] = kwargs.pop("slurm") == 1
|
||||
port_executor = make_port_executor(**kwargs)
|
||||
port_executor.run()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
main()
|
||||
@@ -0,0 +1,281 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import argparse
|
||||
import logging
|
||||
import os
|
||||
from pathlib import Path
|
||||
|
||||
from datatrove.executor import LocalPipelineExecutor
|
||||
from datatrove.executor.slurm import SlurmPipelineExecutor
|
||||
from datatrove.pipeline.base import PipelineStep
|
||||
from huggingface_hub import HfApi
|
||||
from huggingface_hub.constants import REPOCARD_NAME
|
||||
from port_datasets.droid_rlds.port_droid import DROID_SHARDS
|
||||
|
||||
from lerobot.datasets.lerobot_dataset import CODEBASE_VERSION, LeRobotDatasetMetadata
|
||||
from lerobot.datasets.utils import create_lerobot_dataset_card
|
||||
from lerobot.utils.utils import init_logging
|
||||
|
||||
|
||||
class UploadDataset(PipelineStep):
|
||||
def __init__(
|
||||
self,
|
||||
repo_id: str,
|
||||
branch: str | None = None,
|
||||
revision: str | None = None,
|
||||
tags: list | None = None,
|
||||
license: str | None = "apache-2.0",
|
||||
private: bool = False,
|
||||
distant_repo_id: str | None = None,
|
||||
**card_kwargs,
|
||||
):
|
||||
super().__init__()
|
||||
self.repo_id = repo_id
|
||||
self.distant_repo_id = self.repo_id if distant_repo_id is None else distant_repo_id
|
||||
self.branch = branch
|
||||
self.tags = tags
|
||||
self.license = license
|
||||
self.private = private
|
||||
self.card_kwargs = card_kwargs
|
||||
self.revision = revision if revision else CODEBASE_VERSION
|
||||
|
||||
if os.environ.get("HF_HUB_ENABLE_HF_TRANSFER", "0") != "1":
|
||||
logging.warning(
|
||||
'HF_HUB_ENABLE_HF_TRANSFER is not set to "1". Install hf_transfer and set the env '
|
||||
"variable for faster uploads:\npip install hf-transfer\nexport HF_HUB_ENABLE_HF_TRANSFER=1"
|
||||
)
|
||||
|
||||
self.create_repo()
|
||||
|
||||
def create_repo(self):
|
||||
logging.info(f"Loading meta data from {self.repo_id}...")
|
||||
meta = LeRobotDatasetMetadata(self.repo_id)
|
||||
|
||||
logging.info(f"Creating repo {self.distant_repo_id}...")
|
||||
hub_api = HfApi()
|
||||
hub_api.create_repo(
|
||||
repo_id=self.distant_repo_id,
|
||||
private=self.private,
|
||||
repo_type="dataset",
|
||||
exist_ok=True,
|
||||
)
|
||||
if self.branch:
|
||||
hub_api.create_branch(
|
||||
repo_id=self.distant_repo_id,
|
||||
branch=self.branch,
|
||||
revision=self.revision,
|
||||
repo_type="dataset",
|
||||
exist_ok=True,
|
||||
)
|
||||
|
||||
if not hub_api.file_exists(
|
||||
self.distant_repo_id, REPOCARD_NAME, repo_type="dataset", revision=self.branch
|
||||
):
|
||||
card = create_lerobot_dataset_card(
|
||||
tags=self.tags, dataset_info=meta.info, license=self.license, **self.card_kwargs
|
||||
)
|
||||
card.push_to_hub(repo_id=self.distant_repo_id, repo_type="dataset", revision=self.branch)
|
||||
|
||||
hub_api.create_tag(self.distant_repo_id, tag=CODEBASE_VERSION, repo_type="dataset")
|
||||
|
||||
def list_files_recursively(directory):
|
||||
base_path = Path(directory)
|
||||
return [str(file.relative_to(base_path)) for file in base_path.rglob("*") if file.is_file()]
|
||||
|
||||
logging.info(f"Listing all local files from {self.repo_id}...")
|
||||
self.file_paths = list_files_recursively(meta.root)
|
||||
self.file_paths = sorted(self.file_paths)
|
||||
|
||||
def create_chunks(self, lst, n):
|
||||
from itertools import islice
|
||||
|
||||
it = iter(lst)
|
||||
return [list(islice(it, size)) for size in [len(lst) // n + (i < len(lst) % n) for i in range(n)]]
|
||||
|
||||
def create_commits(self, additions):
|
||||
import logging
|
||||
import math
|
||||
import random
|
||||
import time
|
||||
|
||||
from huggingface_hub import create_commit
|
||||
from huggingface_hub.utils import HfHubHTTPError
|
||||
|
||||
FILES_BETWEEN_COMMITS = 10 # noqa: N806
|
||||
BASE_DELAY = 0.1 # noqa: N806
|
||||
MAX_RETRIES = 12 # noqa: N806
|
||||
|
||||
# Split the files into smaller chunks for faster commit
|
||||
# and avoiding "A commit has happened since" error
|
||||
num_chunks = math.ceil(len(additions) / FILES_BETWEEN_COMMITS)
|
||||
chunks = self.create_chunks(additions, num_chunks)
|
||||
|
||||
for chunk in chunks:
|
||||
retries = 0
|
||||
while True:
|
||||
try:
|
||||
create_commit(
|
||||
self.distant_repo_id,
|
||||
repo_type="dataset",
|
||||
operations=chunk,
|
||||
commit_message=f"DataTrove upload ({len(chunk)} files)",
|
||||
revision=self.branch,
|
||||
)
|
||||
# TODO: every 100 chunks super_squach_commits()
|
||||
logging.info("create_commit completed!")
|
||||
break
|
||||
except HfHubHTTPError as e:
|
||||
if "A commit has happened since" in e.server_message:
|
||||
if retries >= MAX_RETRIES:
|
||||
logging.error(f"Failed to create commit after {MAX_RETRIES=}. Giving up.")
|
||||
raise e
|
||||
logging.info("Commit creation race condition issue. Waiting...")
|
||||
time.sleep(BASE_DELAY * 2**retries + random.uniform(0, 2))
|
||||
retries += 1
|
||||
else:
|
||||
raise e
|
||||
|
||||
def run(self, data=None, rank: int = 0, world_size: int = 1):
|
||||
import logging
|
||||
|
||||
from datasets.utils.tqdm import disable_progress_bars
|
||||
from huggingface_hub import CommitOperationAdd, preupload_lfs_files
|
||||
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDatasetMetadata
|
||||
from lerobot.utils.utils import init_logging
|
||||
|
||||
init_logging()
|
||||
disable_progress_bars()
|
||||
|
||||
chunks = self.create_chunks(self.file_paths, world_size)
|
||||
file_paths = chunks[rank]
|
||||
|
||||
if len(file_paths) == 0:
|
||||
raise ValueError(file_paths)
|
||||
|
||||
logging.info("Pre-uploading LFS files...")
|
||||
for i, path in enumerate(file_paths):
|
||||
logging.info(f"{i}: {path}")
|
||||
|
||||
meta = LeRobotDatasetMetadata(self.repo_id)
|
||||
additions = [
|
||||
CommitOperationAdd(path_in_repo=path, path_or_fileobj=meta.root / path) for path in file_paths
|
||||
]
|
||||
preupload_lfs_files(
|
||||
repo_id=self.distant_repo_id, repo_type="dataset", additions=additions, revision=self.branch
|
||||
)
|
||||
|
||||
logging.info("Creating commits...")
|
||||
self.create_commits(additions)
|
||||
logging.info("Done!")
|
||||
|
||||
|
||||
def make_upload_executor(
|
||||
repo_id, job_name, logs_dir, workers, partition, cpus_per_task, mem_per_cpu, slurm=True
|
||||
):
|
||||
kwargs = {
|
||||
"pipeline": [
|
||||
UploadDataset(repo_id),
|
||||
],
|
||||
"logging_dir": str(logs_dir / job_name),
|
||||
}
|
||||
|
||||
if slurm:
|
||||
kwargs.update(
|
||||
{
|
||||
"job_name": job_name,
|
||||
"tasks": DROID_SHARDS,
|
||||
"workers": workers,
|
||||
"time": "08:00:00",
|
||||
"partition": partition,
|
||||
"cpus_per_task": cpus_per_task,
|
||||
"sbatch_args": {"mem-per-cpu": mem_per_cpu},
|
||||
}
|
||||
)
|
||||
executor = SlurmPipelineExecutor(**kwargs)
|
||||
else:
|
||||
kwargs.update(
|
||||
{
|
||||
"tasks": DROID_SHARDS,
|
||||
"workers": 1,
|
||||
}
|
||||
)
|
||||
executor = LocalPipelineExecutor(**kwargs)
|
||||
|
||||
return executor
|
||||
|
||||
|
||||
def main():
|
||||
parser = argparse.ArgumentParser()
|
||||
|
||||
parser.add_argument(
|
||||
"--repo-id",
|
||||
type=str,
|
||||
help="Repositery identifier on Hugging Face: a community or a user name `/` the name of the dataset, required when push-to-hub is True.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--logs-dir",
|
||||
type=Path,
|
||||
help="Path to logs directory for `datatrove`.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--job-name",
|
||||
type=str,
|
||||
default="upload_droid",
|
||||
help="Job name used in slurm, and name of the directory created inside the provided logs directory.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--slurm",
|
||||
type=int,
|
||||
default=1,
|
||||
help="Launch over slurm. Use `--slurm 0` to launch sequentially (useful to debug).",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--workers",
|
||||
type=int,
|
||||
default=50,
|
||||
help="Number of slurm workers. It should be less than the maximum number of shards.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--partition",
|
||||
type=str,
|
||||
help="Slurm partition. Ideally a CPU partition. No need for GPU partition.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--cpus-per-task",
|
||||
type=int,
|
||||
default=8,
|
||||
help="Number of cpus that each slurm worker will use.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--mem-per-cpu",
|
||||
type=str,
|
||||
default="1950M",
|
||||
help="Memory per cpu that each worker will use.",
|
||||
)
|
||||
|
||||
init_logging()
|
||||
|
||||
args = parser.parse_args()
|
||||
kwargs = vars(args)
|
||||
kwargs["slurm"] = kwargs.pop("slurm") == 1
|
||||
upload_executor = make_upload_executor(**kwargs)
|
||||
upload_executor.run()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
main()
|
||||
@@ -0,0 +1,198 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from lerobot.cameras.opencv.configuration_opencv import OpenCVCameraConfig
|
||||
from lerobot.configs.types import FeatureType, PolicyFeature
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
from lerobot.datasets.pipeline_features import aggregate_pipeline_dataset_features, create_initial_features
|
||||
from lerobot.datasets.utils import combine_feature_dicts
|
||||
from lerobot.model.kinematics import RobotKinematics
|
||||
from lerobot.policies.act.modeling_act import ACTPolicy
|
||||
from lerobot.policies.factory import make_pre_post_processors
|
||||
from lerobot.processor import (
|
||||
RobotAction,
|
||||
RobotObservation,
|
||||
RobotProcessorPipeline,
|
||||
make_default_teleop_action_processor,
|
||||
)
|
||||
from lerobot.processor.converters import (
|
||||
observation_to_transition,
|
||||
robot_action_observation_to_transition,
|
||||
transition_to_observation,
|
||||
transition_to_robot_action,
|
||||
)
|
||||
from lerobot.record import record_loop
|
||||
from lerobot.robots.so100_follower.config_so100_follower import SO100FollowerConfig
|
||||
from lerobot.robots.so100_follower.robot_kinematic_processor import (
|
||||
ForwardKinematicsJointsToEE,
|
||||
InverseKinematicsEEToJoints,
|
||||
)
|
||||
from lerobot.robots.so100_follower.so100_follower import SO100Follower
|
||||
from lerobot.utils.control_utils import init_keyboard_listener
|
||||
from lerobot.utils.utils import log_say
|
||||
from lerobot.utils.visualization_utils import _init_rerun
|
||||
|
||||
NUM_EPISODES = 5
|
||||
FPS = 30
|
||||
EPISODE_TIME_SEC = 60
|
||||
TASK_DESCRIPTION = "My task description"
|
||||
HF_MODEL_ID = "<hf_username>/<model_repo_id>"
|
||||
HF_DATASET_ID = "<hf_username>/<dataset_repo_id>"
|
||||
|
||||
# Create the robot configuration & robot
|
||||
camera_config = {"front": OpenCVCameraConfig(index_or_path=0, width=640, height=480, fps=FPS)}
|
||||
robot_config = SO100FollowerConfig(
|
||||
port="/dev/tty.usbmodem5A460814411",
|
||||
id="my_awesome_follower_arm",
|
||||
cameras=camera_config,
|
||||
use_degrees=True,
|
||||
)
|
||||
|
||||
robot = SO100Follower(robot_config)
|
||||
|
||||
# Create policy
|
||||
policy = ACTPolicy.from_pretrained(HF_MODEL_ID)
|
||||
|
||||
# NOTE: It is highly recommended to use the urdf in the SO-ARM100 repo: https://github.com/TheRobotStudio/SO-ARM100/blob/main/Simulation/SO101/so101_new_calib.urdf
|
||||
kinematics_solver = RobotKinematics(
|
||||
urdf_path="./SO101/so101_new_calib.urdf",
|
||||
target_frame_name="gripper_frame_link",
|
||||
joint_names=list(robot.bus.motors.keys()),
|
||||
)
|
||||
|
||||
# Build pipeline to convert EE action to joints action
|
||||
robot_ee_to_joints_processor = RobotProcessorPipeline[tuple[RobotAction, RobotObservation], RobotAction](
|
||||
steps=[
|
||||
InverseKinematicsEEToJoints(
|
||||
kinematics=kinematics_solver,
|
||||
motor_names=list(robot.bus.motors.keys()),
|
||||
initial_guess_current_joints=True,
|
||||
),
|
||||
],
|
||||
to_transition=robot_action_observation_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
|
||||
# Build pipeline to convert joints observation to EE observation
|
||||
robot_joints_to_ee_pose_processor = RobotProcessorPipeline[RobotObservation, RobotObservation](
|
||||
steps=[
|
||||
ForwardKinematicsJointsToEE(kinematics=kinematics_solver, motor_names=list(robot.bus.motors.keys()))
|
||||
],
|
||||
to_transition=observation_to_transition,
|
||||
to_output=transition_to_observation,
|
||||
)
|
||||
|
||||
|
||||
# Create the dataset
|
||||
dataset = LeRobotDataset.create(
|
||||
repo_id=HF_DATASET_ID,
|
||||
fps=FPS,
|
||||
features=combine_feature_dicts(
|
||||
aggregate_pipeline_dataset_features(
|
||||
pipeline=robot_joints_to_ee_pose_processor,
|
||||
initial_features=create_initial_features(observation=robot.observation_features),
|
||||
use_videos=True,
|
||||
),
|
||||
# User for now should be explicit on the feature keys that were used for record
|
||||
# Alternatively, the user can pass the processor step that has the right features
|
||||
aggregate_pipeline_dataset_features(
|
||||
pipeline=make_default_teleop_action_processor(),
|
||||
initial_features=create_initial_features(
|
||||
action={
|
||||
f"ee.{k}": PolicyFeature(type=FeatureType.ACTION, shape=(1,))
|
||||
for k in ["x", "y", "z", "wx", "wy", "wz", "gripper_pos"]
|
||||
}
|
||||
),
|
||||
use_videos=True,
|
||||
),
|
||||
),
|
||||
robot_type=robot.name,
|
||||
use_videos=True,
|
||||
image_writer_threads=4,
|
||||
)
|
||||
|
||||
# Build Policy Processors
|
||||
preprocessor, postprocessor = make_pre_post_processors(
|
||||
policy_cfg=policy,
|
||||
pretrained_path=HF_MODEL_ID,
|
||||
dataset_stats=dataset.meta.stats,
|
||||
# The inference device is automatically set to match the detected hardware, overriding any previous device settings from training to ensure compatibility.
|
||||
preprocessor_overrides={"device_processor": {"device": str(policy.config.device)}},
|
||||
)
|
||||
|
||||
# Connect the robot and teleoperator
|
||||
robot.connect()
|
||||
|
||||
# Initialize the keyboard listener and rerun visualization
|
||||
listener, events = init_keyboard_listener()
|
||||
_init_rerun(session_name="so100_so100_evaluate")
|
||||
|
||||
if not robot.is_connected:
|
||||
raise ValueError("Robot is not connected!")
|
||||
|
||||
print("Starting evaluate loop...")
|
||||
episode_idx = 0
|
||||
for episode_idx in range(NUM_EPISODES):
|
||||
log_say(f"Running inference, recording eval episode {episode_idx + 1} of {NUM_EPISODES}")
|
||||
|
||||
# Main record loop
|
||||
record_loop(
|
||||
robot=robot,
|
||||
events=events,
|
||||
fps=FPS,
|
||||
policy=policy,
|
||||
preprocessor=preprocessor, # Pass the pre and post policy processors
|
||||
postprocessor=postprocessor,
|
||||
dataset=dataset,
|
||||
control_time_s=EPISODE_TIME_SEC,
|
||||
single_task=TASK_DESCRIPTION,
|
||||
display_data=True,
|
||||
teleop_action_processor=make_default_teleop_action_processor(),
|
||||
robot_action_processor=robot_ee_to_joints_processor,
|
||||
robot_observation_processor=robot_joints_to_ee_pose_processor,
|
||||
)
|
||||
|
||||
# Reset the environment if not stopping or re-recording
|
||||
if not events["stop_recording"] and ((episode_idx < NUM_EPISODES - 1) or events["rerecord_episode"]):
|
||||
log_say("Reset the environment")
|
||||
record_loop(
|
||||
robot=robot,
|
||||
events=events,
|
||||
fps=FPS,
|
||||
control_time_s=EPISODE_TIME_SEC,
|
||||
single_task=TASK_DESCRIPTION,
|
||||
display_data=True,
|
||||
teleop_action_processor=make_default_teleop_action_processor(),
|
||||
robot_action_processor=robot_ee_to_joints_processor,
|
||||
robot_observation_processor=robot_joints_to_ee_pose_processor,
|
||||
)
|
||||
|
||||
if events["rerecord_episode"]:
|
||||
log_say("Re-record episode")
|
||||
events["rerecord_episode"] = False
|
||||
events["exit_early"] = False
|
||||
dataset.clear_episode_buffer()
|
||||
continue
|
||||
|
||||
# Save episode
|
||||
dataset.save_episode()
|
||||
episode_idx += 1
|
||||
|
||||
# Clean up
|
||||
log_say("Stop recording")
|
||||
robot.disconnect()
|
||||
listener.stop()
|
||||
dataset.push_to_hub()
|
||||
@@ -0,0 +1,203 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
|
||||
from lerobot.cameras.opencv.configuration_opencv import OpenCVCameraConfig
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
from lerobot.datasets.pipeline_features import aggregate_pipeline_dataset_features, create_initial_features
|
||||
from lerobot.datasets.utils import combine_feature_dicts
|
||||
from lerobot.model.kinematics import RobotKinematics
|
||||
from lerobot.processor import RobotAction, RobotObservation, RobotProcessorPipeline
|
||||
from lerobot.processor.converters import (
|
||||
observation_to_transition,
|
||||
robot_action_observation_to_transition,
|
||||
transition_to_observation,
|
||||
transition_to_robot_action,
|
||||
)
|
||||
from lerobot.record import record_loop
|
||||
from lerobot.robots.so100_follower.config_so100_follower import SO100FollowerConfig
|
||||
from lerobot.robots.so100_follower.robot_kinematic_processor import (
|
||||
EEBoundsAndSafety,
|
||||
ForwardKinematicsJointsToEE,
|
||||
InverseKinematicsEEToJoints,
|
||||
)
|
||||
from lerobot.robots.so100_follower.so100_follower import SO100Follower
|
||||
from lerobot.teleoperators.so100_leader.config_so100_leader import SO100LeaderConfig
|
||||
from lerobot.teleoperators.so100_leader.so100_leader import SO100Leader
|
||||
from lerobot.utils.control_utils import init_keyboard_listener
|
||||
from lerobot.utils.utils import log_say
|
||||
from lerobot.utils.visualization_utils import _init_rerun
|
||||
|
||||
NUM_EPISODES = 2
|
||||
FPS = 30
|
||||
EPISODE_TIME_SEC = 60
|
||||
RESET_TIME_SEC = 30
|
||||
TASK_DESCRIPTION = "My task description"
|
||||
HF_REPO_ID = "<hf_username>/<dataset_repo_id>"
|
||||
|
||||
# Create the robot and teleoperator configurations
|
||||
camera_config = {"front": OpenCVCameraConfig(index_or_path=0, width=640, height=480, fps=FPS)}
|
||||
follower_config = SO100FollowerConfig(
|
||||
port="/dev/tty.usbmodem5A460814411", id="my_awesome_follower_arm", cameras=camera_config, use_degrees=True
|
||||
)
|
||||
leader_config = SO100LeaderConfig(port="/dev/tty.usbmodem5A460819811", id="my_awesome_leader_arm")
|
||||
|
||||
# Initialize the robot and teleoperator
|
||||
follower = SO100Follower(follower_config)
|
||||
leader = SO100Leader(leader_config)
|
||||
|
||||
# NOTE: It is highly recommended to use the urdf in the SO-ARM100 repo: https://github.com/TheRobotStudio/SO-ARM100/blob/main/Simulation/SO101/so101_new_calib.urdf
|
||||
follower_kinematics_solver = RobotKinematics(
|
||||
urdf_path="./SO101/so101_new_calib.urdf",
|
||||
target_frame_name="gripper_frame_link",
|
||||
joint_names=list(follower.bus.motors.keys()),
|
||||
)
|
||||
|
||||
# NOTE: It is highly recommended to use the urdf in the SO-ARM100 repo: https://github.com/TheRobotStudio/SO-ARM100/blob/main/Simulation/SO101/so101_new_calib.urdf
|
||||
leader_kinematics_solver = RobotKinematics(
|
||||
urdf_path="./SO101/so101_new_calib.urdf",
|
||||
target_frame_name="gripper_frame_link",
|
||||
joint_names=list(leader.bus.motors.keys()),
|
||||
)
|
||||
|
||||
# Build pipeline to convert follower joints to EE observation
|
||||
follower_joints_to_ee = RobotProcessorPipeline[RobotObservation, RobotObservation](
|
||||
steps=[
|
||||
ForwardKinematicsJointsToEE(
|
||||
kinematics=follower_kinematics_solver, motor_names=list(follower.bus.motors.keys())
|
||||
),
|
||||
],
|
||||
to_transition=observation_to_transition,
|
||||
to_output=transition_to_observation,
|
||||
)
|
||||
|
||||
# Build pipeline to convert leader joints to EE action
|
||||
leader_joints_to_ee = RobotProcessorPipeline[tuple[RobotAction, RobotObservation], RobotAction](
|
||||
steps=[
|
||||
ForwardKinematicsJointsToEE(
|
||||
kinematics=leader_kinematics_solver, motor_names=list(leader.bus.motors.keys())
|
||||
),
|
||||
],
|
||||
to_transition=robot_action_observation_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
|
||||
# Build pipeline to convert EE action to follower joints
|
||||
ee_to_follower_joints = RobotProcessorPipeline[tuple[RobotAction, RobotObservation], RobotAction](
|
||||
[
|
||||
EEBoundsAndSafety(
|
||||
end_effector_bounds={"min": [-1.0, -1.0, -1.0], "max": [1.0, 1.0, 1.0]},
|
||||
max_ee_step_m=0.10,
|
||||
max_ee_twist_step_rad=0.50,
|
||||
),
|
||||
InverseKinematicsEEToJoints(
|
||||
kinematics=follower_kinematics_solver,
|
||||
motor_names=list(follower.bus.motors.keys()),
|
||||
initial_guess_current_joints=True,
|
||||
),
|
||||
],
|
||||
to_transition=robot_action_observation_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
|
||||
# Create the dataset
|
||||
dataset = LeRobotDataset.create(
|
||||
repo_id=HF_REPO_ID,
|
||||
fps=FPS,
|
||||
features=combine_feature_dicts(
|
||||
# Run the feature contract of the pipelines
|
||||
# This tells you how the features would look like after the pipeline steps
|
||||
aggregate_pipeline_dataset_features(
|
||||
pipeline=leader_joints_to_ee,
|
||||
initial_features=create_initial_features(action=leader.action_features),
|
||||
use_videos=True,
|
||||
),
|
||||
aggregate_pipeline_dataset_features(
|
||||
pipeline=follower_joints_to_ee,
|
||||
initial_features=create_initial_features(observation=follower.observation_features),
|
||||
use_videos=True,
|
||||
),
|
||||
),
|
||||
robot_type=follower.name,
|
||||
use_videos=True,
|
||||
image_writer_threads=4,
|
||||
)
|
||||
|
||||
|
||||
# Connect the robot and teleoperator
|
||||
leader.connect()
|
||||
follower.connect()
|
||||
|
||||
# Initialize the keyboard listener and rerun visualization
|
||||
listener, events = init_keyboard_listener()
|
||||
_init_rerun(session_name="recording_phone")
|
||||
|
||||
if not leader.is_connected or not follower.is_connected:
|
||||
raise ValueError("Robot or teleop is not connected!")
|
||||
|
||||
print("Starting record loop...")
|
||||
episode_idx = 0
|
||||
while episode_idx < NUM_EPISODES and not events["stop_recording"]:
|
||||
log_say(f"Recording episode {episode_idx + 1} of {NUM_EPISODES}")
|
||||
|
||||
# Main record loop
|
||||
record_loop(
|
||||
robot=follower,
|
||||
events=events,
|
||||
fps=FPS,
|
||||
teleop=leader,
|
||||
dataset=dataset,
|
||||
control_time_s=EPISODE_TIME_SEC,
|
||||
single_task=TASK_DESCRIPTION,
|
||||
display_data=True,
|
||||
teleop_action_processor=leader_joints_to_ee,
|
||||
robot_action_processor=ee_to_follower_joints,
|
||||
robot_observation_processor=follower_joints_to_ee,
|
||||
)
|
||||
|
||||
# Reset the environment if not stopping or re-recording
|
||||
if not events["stop_recording"] and (episode_idx < NUM_EPISODES - 1 or events["rerecord_episode"]):
|
||||
log_say("Reset the environment")
|
||||
record_loop(
|
||||
robot=follower,
|
||||
events=events,
|
||||
fps=FPS,
|
||||
teleop=leader,
|
||||
control_time_s=RESET_TIME_SEC,
|
||||
single_task=TASK_DESCRIPTION,
|
||||
display_data=True,
|
||||
teleop_action_processor=leader_joints_to_ee,
|
||||
robot_action_processor=ee_to_follower_joints,
|
||||
robot_observation_processor=follower_joints_to_ee,
|
||||
)
|
||||
|
||||
if events["rerecord_episode"]:
|
||||
log_say("Re-recording episode")
|
||||
events["rerecord_episode"] = False
|
||||
events["exit_early"] = False
|
||||
dataset.clear_episode_buffer()
|
||||
continue
|
||||
|
||||
# Save episode
|
||||
dataset.save_episode()
|
||||
episode_idx += 1
|
||||
|
||||
# Clean up
|
||||
log_say("Stop recording")
|
||||
leader.disconnect()
|
||||
follower.disconnect()
|
||||
listener.stop()
|
||||
dataset.push_to_hub()
|
||||
@@ -0,0 +1,100 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
|
||||
import time
|
||||
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
from lerobot.model.kinematics import RobotKinematics
|
||||
from lerobot.processor import RobotAction, RobotObservation, RobotProcessorPipeline
|
||||
from lerobot.processor.converters import (
|
||||
robot_action_observation_to_transition,
|
||||
transition_to_robot_action,
|
||||
)
|
||||
from lerobot.robots.so100_follower.config_so100_follower import SO100FollowerConfig
|
||||
from lerobot.robots.so100_follower.robot_kinematic_processor import (
|
||||
InverseKinematicsEEToJoints,
|
||||
)
|
||||
from lerobot.robots.so100_follower.so100_follower import SO100Follower
|
||||
from lerobot.utils.robot_utils import busy_wait
|
||||
from lerobot.utils.utils import log_say
|
||||
|
||||
EPISODE_IDX = 0
|
||||
HF_REPO_ID = "<hf_username>/<dataset_repo_id>"
|
||||
|
||||
# Initialize the robot config
|
||||
robot_config = SO100FollowerConfig(
|
||||
port="/dev/tty.usbmodem5A460814411", id="my_awesome_follower_arm", use_degrees=True
|
||||
)
|
||||
|
||||
# Initialize the robot
|
||||
robot = SO100Follower(robot_config)
|
||||
|
||||
# NOTE: It is highly recommended to use the urdf in the SO-ARM100 repo: https://github.com/TheRobotStudio/SO-ARM100/blob/main/Simulation/SO101/so101_new_calib.urdf
|
||||
kinematics_solver = RobotKinematics(
|
||||
urdf_path="./SO101/so101_new_calib.urdf",
|
||||
target_frame_name="gripper_frame_link",
|
||||
joint_names=list(robot.bus.motors.keys()),
|
||||
)
|
||||
|
||||
# Build pipeline to convert EE action to joints action
|
||||
robot_ee_to_joints_processor = RobotProcessorPipeline[tuple[RobotAction, RobotObservation], RobotAction](
|
||||
steps=[
|
||||
InverseKinematicsEEToJoints(
|
||||
kinematics=kinematics_solver,
|
||||
motor_names=list(robot.bus.motors.keys()),
|
||||
initial_guess_current_joints=False, # Because replay is open loop
|
||||
),
|
||||
],
|
||||
to_transition=robot_action_observation_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
|
||||
# Fetch the dataset to replay
|
||||
dataset = LeRobotDataset(HF_REPO_ID, episodes=[EPISODE_IDX])
|
||||
# Filter dataset to only include frames from the specified episode since episodes are chunked in dataset V3.0
|
||||
episode_frames = dataset.hf_dataset.filter(lambda x: x["episode_index"] == EPISODE_IDX)
|
||||
actions = episode_frames.select_columns("action")
|
||||
|
||||
# Connect to the robot
|
||||
robot.connect()
|
||||
|
||||
if not robot.is_connected:
|
||||
raise ValueError("Robot is not connected!")
|
||||
|
||||
print("Starting replay loop...")
|
||||
log_say(f"Replaying episode {EPISODE_IDX}")
|
||||
for idx in range(len(episode_frames)):
|
||||
t0 = time.perf_counter()
|
||||
|
||||
# Get recorded action from dataset
|
||||
ee_action = {
|
||||
name: float(actions[idx]["action"][i]) for i, name in enumerate(dataset.features["action"]["names"])
|
||||
}
|
||||
|
||||
# Get robot observation
|
||||
robot_obs = robot.get_observation()
|
||||
|
||||
# Dataset EE -> robot joints
|
||||
joint_action = robot_ee_to_joints_processor((ee_action, robot_obs))
|
||||
|
||||
# Send action to robot
|
||||
_ = robot.send_action(joint_action)
|
||||
|
||||
busy_wait(1.0 / dataset.fps - (time.perf_counter() - t0))
|
||||
|
||||
# Clean up
|
||||
robot.disconnect()
|
||||
@@ -0,0 +1,122 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import time
|
||||
|
||||
from lerobot.model.kinematics import RobotKinematics
|
||||
from lerobot.processor import RobotAction, RobotObservation, RobotProcessorPipeline
|
||||
from lerobot.processor.converters import (
|
||||
robot_action_observation_to_transition,
|
||||
robot_action_to_transition,
|
||||
transition_to_robot_action,
|
||||
)
|
||||
from lerobot.robots.so100_follower.config_so100_follower import SO100FollowerConfig
|
||||
from lerobot.robots.so100_follower.robot_kinematic_processor import (
|
||||
EEBoundsAndSafety,
|
||||
ForwardKinematicsJointsToEE,
|
||||
InverseKinematicsEEToJoints,
|
||||
)
|
||||
from lerobot.robots.so100_follower.so100_follower import SO100Follower
|
||||
from lerobot.teleoperators.so100_leader.config_so100_leader import SO100LeaderConfig
|
||||
from lerobot.teleoperators.so100_leader.so100_leader import SO100Leader
|
||||
from lerobot.utils.robot_utils import busy_wait
|
||||
from lerobot.utils.visualization_utils import _init_rerun, log_rerun_data
|
||||
|
||||
FPS = 30
|
||||
|
||||
# Initialize the robot and teleoperator config
|
||||
follower_config = SO100FollowerConfig(
|
||||
port="/dev/tty.usbmodem5A460814411", id="my_awesome_follower_arm", use_degrees=True
|
||||
)
|
||||
leader_config = SO100LeaderConfig(port="/dev/tty.usbmodem5A460819811", id="my_awesome_leader_arm")
|
||||
|
||||
# Initialize the robot and teleoperator
|
||||
follower = SO100Follower(follower_config)
|
||||
leader = SO100Leader(leader_config)
|
||||
|
||||
# NOTE: It is highly recommended to use the urdf in the SO-ARM100 repo: https://github.com/TheRobotStudio/SO-ARM100/blob/main/Simulation/SO101/so101_new_calib.urdf
|
||||
follower_kinematics_solver = RobotKinematics(
|
||||
urdf_path="./SO101/so101_new_calib.urdf",
|
||||
target_frame_name="gripper_frame_link",
|
||||
joint_names=list(follower.bus.motors.keys()),
|
||||
)
|
||||
|
||||
# NOTE: It is highly recommended to use the urdf in the SO-ARM100 repo: https://github.com/TheRobotStudio/SO-ARM100/blob/main/Simulation/SO101/so101_new_calib.urdf
|
||||
leader_kinematics_solver = RobotKinematics(
|
||||
urdf_path="./SO101/so101_new_calib.urdf",
|
||||
target_frame_name="gripper_frame_link",
|
||||
joint_names=list(leader.bus.motors.keys()),
|
||||
)
|
||||
|
||||
# Build pipeline to convert teleop joints to EE action
|
||||
leader_to_ee = RobotProcessorPipeline[RobotAction, RobotAction](
|
||||
steps=[
|
||||
ForwardKinematicsJointsToEE(
|
||||
kinematics=leader_kinematics_solver, motor_names=list(leader.bus.motors.keys())
|
||||
),
|
||||
],
|
||||
to_transition=robot_action_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
|
||||
# build pipeline to convert EE action to robot joints
|
||||
ee_to_follower_joints = RobotProcessorPipeline[tuple[RobotAction, RobotObservation], RobotAction](
|
||||
[
|
||||
EEBoundsAndSafety(
|
||||
end_effector_bounds={"min": [-1.0, -1.0, -1.0], "max": [1.0, 1.0, 1.0]},
|
||||
max_ee_step_m=0.10,
|
||||
max_ee_twist_step_rad=0.50,
|
||||
),
|
||||
InverseKinematicsEEToJoints(
|
||||
kinematics=follower_kinematics_solver,
|
||||
motor_names=list(follower.bus.motors.keys()),
|
||||
initial_guess_current_joints=False,
|
||||
),
|
||||
],
|
||||
to_transition=robot_action_observation_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
|
||||
# Connect to the robot and teleoperator
|
||||
follower.connect()
|
||||
leader.connect()
|
||||
|
||||
# Init rerun viewer
|
||||
_init_rerun(session_name="so100_so100_EE_teleop")
|
||||
|
||||
print("Starting teleop loop...")
|
||||
while True:
|
||||
t0 = time.perf_counter()
|
||||
|
||||
# Get robot observation
|
||||
robot_obs = follower.get_observation()
|
||||
|
||||
# Get teleop observation
|
||||
leader_joints_obs = leader.get_action()
|
||||
|
||||
# teleop joints -> teleop EE action
|
||||
leader_ee_act = leader_to_ee(leader_joints_obs)
|
||||
|
||||
# teleop EE -> robot joints
|
||||
follower_joints_act = ee_to_follower_joints((leader_ee_act, robot_obs))
|
||||
|
||||
# Send action to robot
|
||||
_ = follower.send_action(follower_joints_act)
|
||||
|
||||
# Visualize
|
||||
log_rerun_data(observation=leader_ee_act, action=follower_joints_act)
|
||||
|
||||
busy_wait(max(1.0 / FPS - (time.perf_counter() - t0), 0.0))
|
||||
@@ -12,11 +12,7 @@
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
"""This script demonstrates how to train Diffusion Policy on the PushT environment.
|
||||
|
||||
Once you have trained a model with this script, you can try to evaluate it on
|
||||
examples/2_evaluate_pretrained_policy.py
|
||||
"""
|
||||
"""This script demonstrates how to train Diffusion Policy on the PushT environment."""
|
||||
|
||||
from pathlib import Path
|
||||
|
||||
@@ -27,6 +23,7 @@ from lerobot.datasets.lerobot_dataset import LeRobotDataset, LeRobotDatasetMetad
|
||||
from lerobot.datasets.utils import dataset_to_policy_features
|
||||
from lerobot.policies.diffusion.configuration_diffusion import DiffusionConfig
|
||||
from lerobot.policies.diffusion.modeling_diffusion import DiffusionPolicy
|
||||
from lerobot.policies.factory import make_pre_post_processors
|
||||
|
||||
|
||||
def main():
|
||||
@@ -56,9 +53,10 @@ def main():
|
||||
cfg = DiffusionConfig(input_features=input_features, output_features=output_features)
|
||||
|
||||
# We can now instantiate our policy with this config and the dataset stats.
|
||||
policy = DiffusionPolicy(cfg, dataset_stats=dataset_metadata.stats)
|
||||
policy = DiffusionPolicy(cfg)
|
||||
policy.train()
|
||||
policy.to(device)
|
||||
preprocessor, postprocessor = make_pre_post_processors(cfg, dataset_stats=dataset_metadata.stats)
|
||||
|
||||
# Another policy-dataset interaction is with the delta_timestamps. Each policy expects a given number frames
|
||||
# which can differ for inputs, outputs and rewards (if there are some).
|
||||
@@ -99,7 +97,7 @@ def main():
|
||||
done = False
|
||||
while not done:
|
||||
for batch in dataloader:
|
||||
batch = {k: (v.to(device) if isinstance(v, torch.Tensor) else v) for k, v in batch.items()}
|
||||
batch = preprocessor(batch)
|
||||
loss, _ = policy.forward(batch)
|
||||
loss.backward()
|
||||
optimizer.step()
|
||||
@@ -114,6 +112,8 @@ def main():
|
||||
|
||||
# Save a policy checkpoint.
|
||||
policy.save_pretrained(output_directory)
|
||||
preprocessor.save_pretrained(output_directory)
|
||||
postprocessor.save_pretrained(output_directory)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
@@ -0,0 +1,108 @@
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
"""This script demonstrates how to train a Diffusion Policy on the PushT environment,
|
||||
using a dataset processed in streaming mode."""
|
||||
|
||||
from pathlib import Path
|
||||
|
||||
import torch
|
||||
|
||||
from lerobot.configs.types import FeatureType
|
||||
from lerobot.constants import ACTION
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDatasetMetadata
|
||||
from lerobot.datasets.streaming_dataset import StreamingLeRobotDataset
|
||||
from lerobot.datasets.utils import dataset_to_policy_features
|
||||
from lerobot.policies.act.configuration_act import ACTConfig
|
||||
from lerobot.policies.act.modeling_act import ACTPolicy
|
||||
from lerobot.policies.factory import make_pre_post_processors
|
||||
|
||||
|
||||
def main():
|
||||
# Create a directory to store the training checkpoint.
|
||||
output_directory = Path("outputs/train/example_streaming_dataset")
|
||||
output_directory.mkdir(parents=True, exist_ok=True)
|
||||
|
||||
# Selects the "best" device available
|
||||
device = (
|
||||
torch.device("cuda")
|
||||
if torch.cuda.is_available()
|
||||
else torch.device("mps")
|
||||
if torch.backends.mps.is_available()
|
||||
else torch.device("cpu")
|
||||
)
|
||||
print(f"Using device: {device}")
|
||||
|
||||
training_steps = 10
|
||||
log_freq = 1
|
||||
|
||||
dataset_id = "lerobot/droid_1.0.1" # 26M frames! Would require 4TB of disk space if installed locally (:
|
||||
dataset_metadata = LeRobotDatasetMetadata(dataset_id)
|
||||
features = dataset_to_policy_features(dataset_metadata.features)
|
||||
output_features = {key: ft for key, ft in features.items() if ft.type is FeatureType.ACTION}
|
||||
input_features = {key: ft for key, ft in features.items() if key not in output_features}
|
||||
|
||||
# We can now instantiate our policy with this config and the dataset stats.
|
||||
cfg = ACTConfig(input_features=input_features, output_features=output_features)
|
||||
policy = ACTPolicy(cfg)
|
||||
policy.train()
|
||||
policy.to(device)
|
||||
preprocessor, postprocessor = make_pre_post_processors(cfg, dataset_stats=dataset_metadata.stats)
|
||||
|
||||
# Delta timestamps are used to (1) augment frames used during training and (2) supervise the policy.
|
||||
# Here, we use delta-timestamps to only provide ground truth actions for supervision
|
||||
delta_timestamps = {
|
||||
ACTION: [t / dataset_metadata.fps for t in range(cfg.n_action_steps)],
|
||||
}
|
||||
|
||||
# Instantiating the training dataset in streaming mode allows to not consume up memory as the data is fetched
|
||||
# iteratively rather than being load into memory all at once. Retrieved frames are shuffled across epochs
|
||||
dataset = StreamingLeRobotDataset(dataset_id, delta_timestamps=delta_timestamps, tolerance_s=1e-3)
|
||||
|
||||
optimizer = torch.optim.Adam(policy.parameters(), lr=1e-4)
|
||||
dataloader = torch.utils.data.DataLoader(
|
||||
dataset,
|
||||
num_workers=4,
|
||||
batch_size=16,
|
||||
pin_memory=device.type != "cpu",
|
||||
drop_last=True,
|
||||
prefetch_factor=2, # loads batches with multiprocessing while policy trains
|
||||
)
|
||||
|
||||
# Run training loop.
|
||||
step = 0
|
||||
done = False
|
||||
while not done:
|
||||
for batch in dataloader:
|
||||
batch = preprocessor(batch)
|
||||
loss, _ = policy.forward(batch)
|
||||
loss.backward()
|
||||
optimizer.step()
|
||||
optimizer.zero_grad()
|
||||
|
||||
if step % log_freq == 0:
|
||||
print(f"step: {step} loss: {loss.item():.3f}")
|
||||
step += 1
|
||||
if step >= training_steps:
|
||||
done = True
|
||||
break
|
||||
|
||||
# Save a policy checkpoint.
|
||||
policy.save_pretrained(output_directory)
|
||||
preprocessor.save_pretrained(output_directory)
|
||||
postprocessor.save_pretrained(output_directory)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
main()
|
||||
+12
-5
@@ -59,7 +59,7 @@ keywords = ["lerobot", "huggingface", "robotics", "machine learning", "artifici
|
||||
dependencies = [
|
||||
|
||||
# Hugging Face dependencies
|
||||
"datasets>=2.19.0,<=3.6.0", # TODO: Bumb dependency
|
||||
"datasets>=4.0.0",
|
||||
"diffusers>=0.27.2",
|
||||
"huggingface-hub[hf-transfer,cli]>=0.34.2",
|
||||
|
||||
@@ -84,7 +84,6 @@ dependencies = [
|
||||
|
||||
# Support dependencies
|
||||
"deepdiff>=7.0.1,<9.0.0",
|
||||
"flask>=3.0.3,<4.0.0",
|
||||
"imageio[ffmpeg]>=2.34.0,<3.0.0",
|
||||
"termcolor>=2.4.0,<4.0.0",
|
||||
]
|
||||
@@ -95,7 +94,7 @@ dependencies = [
|
||||
# Common
|
||||
pygame-dep = ["pygame>=2.5.1"]
|
||||
placo-dep = ["placo>=0.9.6"]
|
||||
transformers-dep = ["transformers>=4.50.3,<4.52.0"] # TODO: Bumb dependency
|
||||
transformers-dep = ["transformers>=4.52.0"]
|
||||
grpcio-dep = ["grpcio==1.73.1", "protobuf==6.31.0"]
|
||||
|
||||
# Motors
|
||||
@@ -112,6 +111,7 @@ intelrealsense = [
|
||||
"pyrealsense2>=2.55.1.6486 ; sys_platform != 'darwin'",
|
||||
"pyrealsense2-macosx>=2.54 ; sys_platform == 'darwin'",
|
||||
]
|
||||
phone = ["hebi-py>=2.8.0", "teleop>=0.1.0"]
|
||||
# stretch = [
|
||||
# "hello-robot-stretch-body>=0.7.27 ; sys_platform == 'linux'",
|
||||
# "pyrender @ git+https://github.com/mmatl/pyrender.git ; sys_platform == 'linux'",
|
||||
@@ -121,7 +121,7 @@ intelrealsense = [
|
||||
# Policies
|
||||
pi0 = ["lerobot[transformers-dep]"]
|
||||
smolvla = ["lerobot[transformers-dep]", "num2words>=0.5.14", "accelerate>=1.7.0", "safetensors>=0.4.3"]
|
||||
hilserl = ["lerobot[transformers-dep]", "gym-hil>=0.1.9", "lerobot[grpcio-dep]", "lerobot[placo-dep]"]
|
||||
hilserl = ["lerobot[transformers-dep]", "gym-hil>=0.1.11", "lerobot[grpcio-dep]", "lerobot[placo-dep]"]
|
||||
|
||||
# Features
|
||||
async = ["lerobot[grpcio-dep]", "matplotlib>=3.10.3"]
|
||||
@@ -135,6 +135,8 @@ video_benchmark = ["scikit-image>=0.23.2", "pandas>=2.2.2"]
|
||||
aloha = ["gym-aloha>=0.1.1"]
|
||||
pusht = ["gym-pusht>=0.1.5", "pymunk>=6.6.0,<7.0.0"] # TODO: Fix pymunk version in gym-pusht instead
|
||||
xarm = ["gym-xarm>=0.1.1"]
|
||||
libero = ["lerobot[transformers-dep]", "libero @ git+https://github.com/huggingface/lerobot-libero.git@main#egg=libero"]
|
||||
|
||||
|
||||
# All
|
||||
all = [
|
||||
@@ -154,7 +156,9 @@ all = [
|
||||
"lerobot[video_benchmark]",
|
||||
"lerobot[aloha]",
|
||||
"lerobot[pusht]",
|
||||
"lerobot[xarm]"
|
||||
"lerobot[xarm]",
|
||||
"lerobot[phone]",
|
||||
"lerobot[libero]",
|
||||
]
|
||||
|
||||
[project.scripts]
|
||||
@@ -167,6 +171,9 @@ lerobot-setup-motors="lerobot.setup_motors:main"
|
||||
lerobot-teleoperate="lerobot.teleoperate:main"
|
||||
lerobot-eval="lerobot.scripts.eval:main"
|
||||
lerobot-train="lerobot.scripts.train:main"
|
||||
lerobot-dataset-viz="lerobot.scripts.lerobot_dataset_viz:main"
|
||||
lerobot-info="lerobot.scripts.lerobot_info:main"
|
||||
lerobot-imgtransform-viz="lerobot.scripts.lerobot_imgtransform_viz:main"
|
||||
|
||||
# ---------------- Tool Configurations ----------------
|
||||
[tool.setuptools.packages.find]
|
||||
|
||||
@@ -37,6 +37,7 @@ class DatasetConfig:
|
||||
revision: str | None = None
|
||||
use_imagenet_stats: bool = True
|
||||
video_backend: str = field(default_factory=get_safe_default_codec)
|
||||
streaming: bool = False
|
||||
|
||||
|
||||
@dataclass
|
||||
|
||||
@@ -26,7 +26,7 @@ from huggingface_hub import hf_hub_download
|
||||
from huggingface_hub.constants import CONFIG_NAME
|
||||
from huggingface_hub.errors import HfHubHTTPError
|
||||
|
||||
from lerobot.configs.types import FeatureType, NormalizationMode, PolicyFeature
|
||||
from lerobot.configs.types import FeatureType, PolicyFeature
|
||||
from lerobot.constants import ACTION, OBS_STATE
|
||||
from lerobot.optim.optimizers import OptimizerConfig
|
||||
from lerobot.optim.schedulers import LRSchedulerConfig
|
||||
@@ -53,7 +53,6 @@ class PreTrainedConfig(draccus.ChoiceRegistry, HubMixin, abc.ABC):
|
||||
"""
|
||||
|
||||
n_obs_steps: int = 1
|
||||
normalization_mapping: dict[str, NormalizationMode] = field(default_factory=dict)
|
||||
|
||||
input_features: dict[str, PolicyFeature] = field(default_factory=dict)
|
||||
output_features: dict[str, PolicyFeature] = field(default_factory=dict)
|
||||
@@ -197,11 +196,10 @@ class PreTrainedConfig(draccus.ChoiceRegistry, HubMixin, abc.ABC):
|
||||
config = json.load(f)
|
||||
|
||||
config.pop("type")
|
||||
with tempfile.NamedTemporaryFile("w+") as f:
|
||||
with tempfile.NamedTemporaryFile("w+", delete=False, suffix=".json") as f:
|
||||
json.dump(config, f)
|
||||
config_file = f.name
|
||||
f.flush()
|
||||
|
||||
cli_overrides = policy_kwargs.pop("cli_overrides", [])
|
||||
with draccus.config_type("json"):
|
||||
return draccus.parse(orig_config.__class__, config_file, args=cli_overrides)
|
||||
cli_overrides = policy_kwargs.pop("cli_overrides", [])
|
||||
with draccus.config_type("json"):
|
||||
return draccus.parse(orig_config.__class__, config_file, args=cli_overrides)
|
||||
|
||||
@@ -24,6 +24,12 @@ class FeatureType(str, Enum):
|
||||
ENV = "ENV"
|
||||
ACTION = "ACTION"
|
||||
REWARD = "REWARD"
|
||||
LANGUAGE = "LANGUAGE"
|
||||
|
||||
|
||||
class PipelineFeatureType(str, Enum):
|
||||
ACTION = "ACTION"
|
||||
OBSERVATION = "OBSERVATION"
|
||||
|
||||
|
||||
class NormalizationMode(str, Enum):
|
||||
|
||||
@@ -21,8 +21,14 @@ OBS_ENV_STATE = "observation.environment_state"
|
||||
OBS_STATE = "observation.state"
|
||||
OBS_IMAGE = "observation.image"
|
||||
OBS_IMAGES = "observation.images"
|
||||
OBS_LANGUAGE = "observation.language"
|
||||
ACTION = "action"
|
||||
REWARD = "next.reward"
|
||||
TRUNCATED = "next.truncated"
|
||||
DONE = "next.done"
|
||||
|
||||
OBS_LANGUAGE_TOKENS = OBS_LANGUAGE + ".tokens"
|
||||
OBS_LANGUAGE_ATTENTION_MASK = OBS_LANGUAGE + ".attention_mask"
|
||||
|
||||
ROBOTS = "robots"
|
||||
ROBOT_TYPE = "robot_type"
|
||||
@@ -39,6 +45,9 @@ OPTIMIZER_STATE = "optimizer_state.safetensors"
|
||||
OPTIMIZER_PARAM_GROUPS = "optimizer_param_groups.json"
|
||||
SCHEDULER_STATE = "scheduler_state.json"
|
||||
|
||||
POLICY_PREPROCESSOR_DEFAULT_NAME = "policy_preprocessor"
|
||||
POLICY_POSTPROCESSOR_DEFAULT_NAME = "policy_postprocessor"
|
||||
|
||||
if "LEROBOT_HOME" in os.environ:
|
||||
raise ValueError(
|
||||
f"You have a 'LEROBOT_HOME' environment variable set to '{os.getenv('LEROBOT_HOME')}'.\n"
|
||||
@@ -52,3 +61,8 @@ HF_LEROBOT_HOME = Path(os.getenv("HF_LEROBOT_HOME", default_cache_path)).expandu
|
||||
# calibration dir
|
||||
default_calibration_path = HF_LEROBOT_HOME / "calibration"
|
||||
HF_LEROBOT_CALIBRATION = Path(os.getenv("HF_LEROBOT_CALIBRATION", default_calibration_path)).expanduser()
|
||||
|
||||
|
||||
# streaming datasets
|
||||
LOOKBACK_BACKTRACKTABLE = 100
|
||||
LOOKAHEAD_BACKTRACKTABLE = 100
|
||||
|
||||
@@ -0,0 +1,502 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team.
|
||||
# All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import logging
|
||||
import shutil
|
||||
from pathlib import Path
|
||||
|
||||
import pandas as pd
|
||||
import tqdm
|
||||
|
||||
from lerobot.datasets.compute_stats import aggregate_stats
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDatasetMetadata
|
||||
from lerobot.datasets.utils import (
|
||||
DEFAULT_CHUNK_SIZE,
|
||||
DEFAULT_DATA_FILE_SIZE_IN_MB,
|
||||
DEFAULT_DATA_PATH,
|
||||
DEFAULT_EPISODES_PATH,
|
||||
DEFAULT_VIDEO_FILE_SIZE_IN_MB,
|
||||
DEFAULT_VIDEO_PATH,
|
||||
get_parquet_file_size_in_mb,
|
||||
get_video_size_in_mb,
|
||||
to_parquet_with_hf_images,
|
||||
update_chunk_file_indices,
|
||||
write_info,
|
||||
write_stats,
|
||||
write_tasks,
|
||||
)
|
||||
from lerobot.datasets.video_utils import concatenate_video_files
|
||||
|
||||
|
||||
def validate_all_metadata(all_metadata: list[LeRobotDatasetMetadata]):
|
||||
"""Validates that all dataset metadata have consistent properties.
|
||||
|
||||
Ensures all datasets have the same fps, robot_type, and features to guarantee
|
||||
compatibility when aggregating them into a single dataset.
|
||||
|
||||
Args:
|
||||
all_metadata: List of LeRobotDatasetMetadata objects to validate.
|
||||
|
||||
Returns:
|
||||
tuple: A tuple containing (fps, robot_type, features) from the first metadata.
|
||||
|
||||
Raises:
|
||||
ValueError: If any metadata has different fps, robot_type, or features
|
||||
than the first metadata in the list.
|
||||
"""
|
||||
|
||||
fps = all_metadata[0].fps
|
||||
robot_type = all_metadata[0].robot_type
|
||||
features = all_metadata[0].features
|
||||
|
||||
for meta in tqdm.tqdm(all_metadata, desc="Validate all meta data"):
|
||||
if fps != meta.fps:
|
||||
raise ValueError(f"Same fps is expected, but got fps={meta.fps} instead of {fps}.")
|
||||
if robot_type != meta.robot_type:
|
||||
raise ValueError(
|
||||
f"Same robot_type is expected, but got robot_type={meta.robot_type} instead of {robot_type}."
|
||||
)
|
||||
if features != meta.features:
|
||||
raise ValueError(
|
||||
f"Same features is expected, but got features={meta.features} instead of {features}."
|
||||
)
|
||||
|
||||
return fps, robot_type, features
|
||||
|
||||
|
||||
def update_data_df(df, src_meta, dst_meta):
|
||||
"""Updates a data DataFrame with new indices and task mappings for aggregation.
|
||||
|
||||
Adjusts episode indices, frame indices, and task indices to account for
|
||||
previously aggregated data in the destination dataset.
|
||||
|
||||
Args:
|
||||
df: DataFrame containing the data to be updated.
|
||||
src_meta: Source dataset metadata.
|
||||
dst_meta: Destination dataset metadata.
|
||||
|
||||
Returns:
|
||||
pd.DataFrame: Updated DataFrame with adjusted indices.
|
||||
"""
|
||||
|
||||
def _update(row):
|
||||
row["episode_index"] = row["episode_index"] + dst_meta.info["total_episodes"]
|
||||
row["index"] = row["index"] + dst_meta.info["total_frames"]
|
||||
task = src_meta.tasks.iloc[row["task_index"]].name
|
||||
row["task_index"] = dst_meta.tasks.loc[task].task_index.item()
|
||||
return row
|
||||
|
||||
return df.apply(_update, axis=1)
|
||||
|
||||
|
||||
def update_meta_data(
|
||||
df,
|
||||
dst_meta,
|
||||
meta_idx,
|
||||
data_idx,
|
||||
videos_idx,
|
||||
):
|
||||
"""Updates metadata DataFrame with new chunk, file, and timestamp indices.
|
||||
|
||||
Adjusts all indices and timestamps to account for previously aggregated
|
||||
data and videos in the destination dataset.
|
||||
|
||||
Args:
|
||||
df: DataFrame containing the metadata to be updated.
|
||||
dst_meta: Destination dataset metadata.
|
||||
meta_idx: Dictionary containing current metadata chunk and file indices.
|
||||
data_idx: Dictionary containing current data chunk and file indices.
|
||||
videos_idx: Dictionary containing current video indices and timestamps.
|
||||
|
||||
Returns:
|
||||
pd.DataFrame: Updated DataFrame with adjusted indices and timestamps.
|
||||
"""
|
||||
|
||||
def _update(row):
|
||||
row["meta/episodes/chunk_index"] = row["meta/episodes/chunk_index"] + meta_idx["chunk"]
|
||||
row["meta/episodes/file_index"] = row["meta/episodes/file_index"] + meta_idx["file"]
|
||||
row["data/chunk_index"] = row["data/chunk_index"] + data_idx["chunk"]
|
||||
row["data/file_index"] = row["data/file_index"] + data_idx["file"]
|
||||
for key, video_idx in videos_idx.items():
|
||||
row[f"videos/{key}/chunk_index"] = row[f"videos/{key}/chunk_index"] + video_idx["chunk"]
|
||||
row[f"videos/{key}/file_index"] = row[f"videos/{key}/file_index"] + video_idx["file"]
|
||||
row[f"videos/{key}/from_timestamp"] = (
|
||||
row[f"videos/{key}/from_timestamp"] + video_idx["latest_duration"]
|
||||
)
|
||||
row[f"videos/{key}/to_timestamp"] = (
|
||||
row[f"videos/{key}/to_timestamp"] + video_idx["latest_duration"]
|
||||
)
|
||||
|
||||
row["dataset_from_index"] = row["dataset_from_index"] + dst_meta.info["total_frames"]
|
||||
row["dataset_to_index"] = row["dataset_to_index"] + dst_meta.info["total_frames"]
|
||||
row["episode_index"] = row["episode_index"] + dst_meta.info["total_episodes"]
|
||||
return row
|
||||
|
||||
return df.apply(_update, axis=1)
|
||||
|
||||
|
||||
def aggregate_datasets(
|
||||
repo_ids: list[str],
|
||||
aggr_repo_id: str,
|
||||
roots: list[Path] | None = None,
|
||||
aggr_root: Path | None = None,
|
||||
data_files_size_in_mb: float | None = None,
|
||||
video_files_size_in_mb: float | None = None,
|
||||
chunk_size: int | None = None,
|
||||
):
|
||||
"""Aggregates multiple LeRobot datasets into a single unified dataset.
|
||||
|
||||
This is the main function that orchestrates the aggregation process by:
|
||||
1. Loading and validating all source dataset metadata
|
||||
2. Creating a new destination dataset with unified tasks
|
||||
3. Aggregating videos, data, and metadata from all source datasets
|
||||
4. Finalizing the aggregated dataset with proper statistics
|
||||
|
||||
Args:
|
||||
repo_ids: List of repository IDs for the datasets to aggregate.
|
||||
aggr_repo_id: Repository ID for the aggregated output dataset.
|
||||
roots: Optional list of root paths for the source datasets.
|
||||
aggr_root: Optional root path for the aggregated dataset.
|
||||
data_files_size_in_mb: Maximum size for data files in MB (defaults to DEFAULT_DATA_FILE_SIZE_IN_MB)
|
||||
video_files_size_in_mb: Maximum size for video files in MB (defaults to DEFAULT_VIDEO_FILE_SIZE_IN_MB)
|
||||
chunk_size: Maximum number of files per chunk (defaults to DEFAULT_CHUNK_SIZE)
|
||||
"""
|
||||
logging.info("Start aggregate_datasets")
|
||||
|
||||
if data_files_size_in_mb is None:
|
||||
data_files_size_in_mb = DEFAULT_DATA_FILE_SIZE_IN_MB
|
||||
if video_files_size_in_mb is None:
|
||||
video_files_size_in_mb = DEFAULT_VIDEO_FILE_SIZE_IN_MB
|
||||
if chunk_size is None:
|
||||
chunk_size = DEFAULT_CHUNK_SIZE
|
||||
|
||||
all_metadata = (
|
||||
[LeRobotDatasetMetadata(repo_id) for repo_id in repo_ids]
|
||||
if roots is None
|
||||
else [
|
||||
LeRobotDatasetMetadata(repo_id, root=root) for repo_id, root in zip(repo_ids, roots, strict=False)
|
||||
]
|
||||
)
|
||||
fps, robot_type, features = validate_all_metadata(all_metadata)
|
||||
video_keys = [key for key in features if features[key]["dtype"] == "video"]
|
||||
|
||||
dst_meta = LeRobotDatasetMetadata.create(
|
||||
repo_id=aggr_repo_id,
|
||||
fps=fps,
|
||||
robot_type=robot_type,
|
||||
features=features,
|
||||
root=aggr_root,
|
||||
)
|
||||
|
||||
logging.info("Find all tasks")
|
||||
unique_tasks = pd.concat([m.tasks for m in all_metadata]).index.unique()
|
||||
dst_meta.tasks = pd.DataFrame({"task_index": range(len(unique_tasks))}, index=unique_tasks)
|
||||
|
||||
meta_idx = {"chunk": 0, "file": 0}
|
||||
data_idx = {"chunk": 0, "file": 0}
|
||||
videos_idx = {
|
||||
key: {"chunk": 0, "file": 0, "latest_duration": 0, "episode_duration": 0} for key in video_keys
|
||||
}
|
||||
|
||||
dst_meta.episodes = {}
|
||||
|
||||
for src_meta in tqdm.tqdm(all_metadata, desc="Copy data and videos"):
|
||||
videos_idx = aggregate_videos(src_meta, dst_meta, videos_idx, video_files_size_in_mb, chunk_size)
|
||||
data_idx = aggregate_data(src_meta, dst_meta, data_idx, data_files_size_in_mb, chunk_size)
|
||||
|
||||
meta_idx = aggregate_metadata(src_meta, dst_meta, meta_idx, data_idx, videos_idx)
|
||||
|
||||
dst_meta.info["total_episodes"] += src_meta.total_episodes
|
||||
dst_meta.info["total_frames"] += src_meta.total_frames
|
||||
|
||||
finalize_aggregation(dst_meta, all_metadata)
|
||||
logging.info("Aggregation complete.")
|
||||
|
||||
|
||||
def aggregate_videos(src_meta, dst_meta, videos_idx, video_files_size_in_mb, chunk_size):
|
||||
"""Aggregates video chunks from a source dataset into the destination dataset.
|
||||
|
||||
Handles video file concatenation and rotation based on file size limits.
|
||||
Creates new video files when size limits are exceeded.
|
||||
|
||||
Args:
|
||||
src_meta: Source dataset metadata.
|
||||
dst_meta: Destination dataset metadata.
|
||||
videos_idx: Dictionary tracking video chunk and file indices.
|
||||
video_files_size_in_mb: Maximum size for video files in MB (defaults to DEFAULT_VIDEO_FILE_SIZE_IN_MB)
|
||||
chunk_size: Maximum number of files per chunk (defaults to DEFAULT_CHUNK_SIZE)
|
||||
|
||||
Returns:
|
||||
dict: Updated videos_idx with current chunk and file indices.
|
||||
"""
|
||||
for key, video_idx in videos_idx.items():
|
||||
unique_chunk_file_pairs = {
|
||||
(chunk, file)
|
||||
for chunk, file in zip(
|
||||
src_meta.episodes[f"videos/{key}/chunk_index"],
|
||||
src_meta.episodes[f"videos/{key}/file_index"],
|
||||
strict=False,
|
||||
)
|
||||
}
|
||||
unique_chunk_file_pairs = sorted(unique_chunk_file_pairs)
|
||||
|
||||
chunk_idx = video_idx["chunk"]
|
||||
file_idx = video_idx["file"]
|
||||
|
||||
for src_chunk_idx, src_file_idx in unique_chunk_file_pairs:
|
||||
src_path = src_meta.root / DEFAULT_VIDEO_PATH.format(
|
||||
video_key=key,
|
||||
chunk_index=src_chunk_idx,
|
||||
file_index=src_file_idx,
|
||||
)
|
||||
|
||||
dst_path = dst_meta.root / DEFAULT_VIDEO_PATH.format(
|
||||
video_key=key,
|
||||
chunk_index=chunk_idx,
|
||||
file_index=file_idx,
|
||||
)
|
||||
|
||||
# If a new file is created, we don't want to increment the latest_duration
|
||||
update_latest_duration = False
|
||||
|
||||
if not dst_path.exists():
|
||||
# First write to this destination file
|
||||
dst_path.parent.mkdir(parents=True, exist_ok=True)
|
||||
shutil.copy(str(src_path), str(dst_path))
|
||||
continue # not accumulating further, already copied the file in place
|
||||
|
||||
# Check file sizes before appending
|
||||
src_size = get_video_size_in_mb(src_path)
|
||||
dst_size = get_video_size_in_mb(dst_path)
|
||||
|
||||
if dst_size + src_size >= video_files_size_in_mb:
|
||||
# Rotate to a new chunk/file
|
||||
chunk_idx, file_idx = update_chunk_file_indices(chunk_idx, file_idx, chunk_size)
|
||||
dst_path = dst_meta.root / DEFAULT_VIDEO_PATH.format(
|
||||
video_key=key,
|
||||
chunk_index=chunk_idx,
|
||||
file_index=file_idx,
|
||||
)
|
||||
dst_path.parent.mkdir(parents=True, exist_ok=True)
|
||||
shutil.copy(str(src_path), str(dst_path))
|
||||
else:
|
||||
# Get the timestamps shift for this video
|
||||
timestamps_shift_s = dst_meta.info["total_frames"] / dst_meta.info["fps"]
|
||||
|
||||
# Append to existing video file
|
||||
concatenate_video_files(
|
||||
[dst_path, src_path],
|
||||
dst_path,
|
||||
)
|
||||
# Update the latest_duration when appending (shifts timestamps!)
|
||||
update_latest_duration = not update_latest_duration
|
||||
|
||||
# Update the videos_idx with the final chunk and file indices for this key
|
||||
videos_idx[key]["chunk"] = chunk_idx
|
||||
videos_idx[key]["file"] = file_idx
|
||||
|
||||
if update_latest_duration:
|
||||
videos_idx[key]["latest_duration"] += timestamps_shift_s
|
||||
|
||||
return videos_idx
|
||||
|
||||
|
||||
def aggregate_data(src_meta, dst_meta, data_idx, data_files_size_in_mb, chunk_size):
|
||||
"""Aggregates data chunks from a source dataset into the destination dataset.
|
||||
|
||||
Reads source data files, updates indices to match the aggregated dataset,
|
||||
and writes them to the destination with proper file rotation.
|
||||
|
||||
Args:
|
||||
src_meta: Source dataset metadata.
|
||||
dst_meta: Destination dataset metadata.
|
||||
data_idx: Dictionary tracking data chunk and file indices.
|
||||
|
||||
Returns:
|
||||
dict: Updated data_idx with current chunk and file indices.
|
||||
"""
|
||||
unique_chunk_file_ids = {
|
||||
(c, f)
|
||||
for c, f in zip(
|
||||
src_meta.episodes["data/chunk_index"], src_meta.episodes["data/file_index"], strict=False
|
||||
)
|
||||
}
|
||||
|
||||
unique_chunk_file_ids = sorted(unique_chunk_file_ids)
|
||||
|
||||
for src_chunk_idx, src_file_idx in unique_chunk_file_ids:
|
||||
src_path = src_meta.root / DEFAULT_DATA_PATH.format(
|
||||
chunk_index=src_chunk_idx, file_index=src_file_idx
|
||||
)
|
||||
df = pd.read_parquet(src_path)
|
||||
df = update_data_df(df, src_meta, dst_meta)
|
||||
|
||||
data_idx = append_or_create_parquet_file(
|
||||
df,
|
||||
src_path,
|
||||
data_idx,
|
||||
data_files_size_in_mb,
|
||||
chunk_size,
|
||||
DEFAULT_DATA_PATH,
|
||||
contains_images=len(dst_meta.image_keys) > 0,
|
||||
aggr_root=dst_meta.root,
|
||||
)
|
||||
|
||||
return data_idx
|
||||
|
||||
|
||||
def aggregate_metadata(src_meta, dst_meta, meta_idx, data_idx, videos_idx):
|
||||
"""Aggregates metadata from a source dataset into the destination dataset.
|
||||
|
||||
Reads source metadata files, updates all indices and timestamps,
|
||||
and writes them to the destination with proper file rotation.
|
||||
|
||||
Args:
|
||||
src_meta: Source dataset metadata.
|
||||
dst_meta: Destination dataset metadata.
|
||||
meta_idx: Dictionary tracking metadata chunk and file indices.
|
||||
data_idx: Dictionary tracking data chunk and file indices.
|
||||
videos_idx: Dictionary tracking video indices and timestamps.
|
||||
|
||||
Returns:
|
||||
dict: Updated meta_idx with current chunk and file indices.
|
||||
"""
|
||||
chunk_file_ids = {
|
||||
(c, f)
|
||||
for c, f in zip(
|
||||
src_meta.episodes["meta/episodes/chunk_index"],
|
||||
src_meta.episodes["meta/episodes/file_index"],
|
||||
strict=False,
|
||||
)
|
||||
}
|
||||
|
||||
chunk_file_ids = sorted(chunk_file_ids)
|
||||
for chunk_idx, file_idx in chunk_file_ids:
|
||||
src_path = src_meta.root / DEFAULT_EPISODES_PATH.format(chunk_index=chunk_idx, file_index=file_idx)
|
||||
df = pd.read_parquet(src_path)
|
||||
df = update_meta_data(
|
||||
df,
|
||||
dst_meta,
|
||||
meta_idx,
|
||||
data_idx,
|
||||
videos_idx,
|
||||
)
|
||||
|
||||
for k in videos_idx:
|
||||
videos_idx[k]["latest_duration"] += videos_idx[k]["episode_duration"]
|
||||
|
||||
meta_idx = append_or_create_parquet_file(
|
||||
df,
|
||||
src_path,
|
||||
meta_idx,
|
||||
DEFAULT_DATA_FILE_SIZE_IN_MB,
|
||||
DEFAULT_CHUNK_SIZE,
|
||||
DEFAULT_EPISODES_PATH,
|
||||
contains_images=False,
|
||||
aggr_root=dst_meta.root,
|
||||
)
|
||||
|
||||
return meta_idx
|
||||
|
||||
|
||||
def append_or_create_parquet_file(
|
||||
df: pd.DataFrame,
|
||||
src_path: Path,
|
||||
idx: dict[str, int],
|
||||
max_mb: float,
|
||||
chunk_size: int,
|
||||
default_path: str,
|
||||
contains_images: bool = False,
|
||||
aggr_root: Path = None,
|
||||
):
|
||||
"""Appends data to an existing parquet file or creates a new one based on size constraints.
|
||||
|
||||
Manages file rotation when size limits are exceeded to prevent individual files
|
||||
from becoming too large. Handles both regular parquet files and those containing images.
|
||||
|
||||
Args:
|
||||
df: DataFrame to write to the parquet file.
|
||||
src_path: Path to the source file (used for size estimation).
|
||||
idx: Dictionary containing current 'chunk' and 'file' indices.
|
||||
max_mb: Maximum allowed file size in MB before rotation.
|
||||
chunk_size: Maximum number of files per chunk before incrementing chunk index.
|
||||
default_path: Format string for generating file paths.
|
||||
contains_images: Whether the data contains images requiring special handling.
|
||||
aggr_root: Root path for the aggregated dataset.
|
||||
|
||||
Returns:
|
||||
dict: Updated index dictionary with current chunk and file indices.
|
||||
"""
|
||||
dst_path = aggr_root / default_path.format(chunk_index=idx["chunk"], file_index=idx["file"])
|
||||
|
||||
if not dst_path.exists():
|
||||
dst_path.parent.mkdir(parents=True, exist_ok=True)
|
||||
if contains_images:
|
||||
to_parquet_with_hf_images(df, dst_path)
|
||||
else:
|
||||
df.to_parquet(dst_path)
|
||||
return idx
|
||||
|
||||
src_size = get_parquet_file_size_in_mb(src_path)
|
||||
dst_size = get_parquet_file_size_in_mb(dst_path)
|
||||
|
||||
if dst_size + src_size >= max_mb:
|
||||
idx["chunk"], idx["file"] = update_chunk_file_indices(idx["chunk"], idx["file"], chunk_size)
|
||||
new_path = aggr_root / default_path.format(chunk_index=idx["chunk"], file_index=idx["file"])
|
||||
new_path.parent.mkdir(parents=True, exist_ok=True)
|
||||
final_df = df
|
||||
target_path = new_path
|
||||
else:
|
||||
existing_df = pd.read_parquet(dst_path)
|
||||
final_df = pd.concat([existing_df, df], ignore_index=True)
|
||||
target_path = dst_path
|
||||
|
||||
if contains_images:
|
||||
to_parquet_with_hf_images(final_df, target_path)
|
||||
else:
|
||||
final_df.to_parquet(target_path)
|
||||
|
||||
return idx
|
||||
|
||||
|
||||
def finalize_aggregation(aggr_meta, all_metadata):
|
||||
"""Finalizes the dataset aggregation by writing summary files and statistics.
|
||||
|
||||
Writes the tasks file, info file with total counts and splits, and
|
||||
aggregated statistics from all source datasets.
|
||||
|
||||
Args:
|
||||
aggr_meta: Aggregated dataset metadata.
|
||||
all_metadata: List of all source dataset metadata objects.
|
||||
"""
|
||||
logging.info("write tasks")
|
||||
write_tasks(aggr_meta.tasks, aggr_meta.root)
|
||||
|
||||
logging.info("write info")
|
||||
aggr_meta.info.update(
|
||||
{
|
||||
"total_tasks": len(aggr_meta.tasks),
|
||||
"total_episodes": sum(m.total_episodes for m in all_metadata),
|
||||
"total_frames": sum(m.total_frames for m in all_metadata),
|
||||
"splits": {"train": f"0:{sum(m.total_episodes for m in all_metadata)}"},
|
||||
}
|
||||
)
|
||||
write_info(aggr_meta.info, aggr_meta.root)
|
||||
|
||||
logging.info("write stats")
|
||||
aggr_meta.stats = aggregate_stats([m.stats for m in all_metadata])
|
||||
write_stats(aggr_meta.stats, aggr_meta.root)
|
||||
@@ -14,33 +14,13 @@
|
||||
|
||||
import packaging.version
|
||||
|
||||
V2_MESSAGE = """
|
||||
V30_MESSAGE = """
|
||||
The dataset you requested ({repo_id}) is in {version} format.
|
||||
|
||||
We introduced a new format since v2.0 which is not backward compatible with v1.x.
|
||||
Please, use our conversion script. Modify the following command with your own task description:
|
||||
We introduced a new format since v3.0 which is not backward compatible with v2.1.
|
||||
Please, update your dataset to the new format using this command:
|
||||
```
|
||||
python -m lerobot.datasets.v2.convert_dataset_v1_to_v2 \\
|
||||
--repo-id {repo_id} \\
|
||||
--single-task "TASK DESCRIPTION." # <---- /!\\ Replace TASK DESCRIPTION /!\\
|
||||
```
|
||||
|
||||
A few examples to replace TASK DESCRIPTION: "Pick up the blue cube and place it into the bin.", "Insert the
|
||||
peg into the socket.", "Slide open the ziploc bag.", "Take the elevator to the 1st floor.", "Open the top
|
||||
cabinet, store the pot inside it then close the cabinet.", "Push the T-shaped block onto the T-shaped
|
||||
target.", "Grab the spray paint on the shelf and place it in the bin on top of the robot dog.", "Fold the
|
||||
sweatshirt.", ...
|
||||
|
||||
If you encounter a problem, contact LeRobot maintainers on [Discord](https://discord.com/invite/s3KuuzsPFb)
|
||||
or open an [issue on GitHub](https://github.com/huggingface/lerobot/issues/new/choose).
|
||||
"""
|
||||
|
||||
V21_MESSAGE = """
|
||||
The dataset you requested ({repo_id}) is in {version} format.
|
||||
While current version of LeRobot is backward-compatible with it, the version of your dataset still uses global
|
||||
stats instead of per-episode stats. Update your dataset stats to the new format using this command:
|
||||
```
|
||||
python -m lerobot.datasets.v21.convert_dataset_v20_to_v21 --repo-id={repo_id}
|
||||
python -m lerobot.datasets.v30.convert_dataset_v21_to_v30 --repo-id={repo_id}
|
||||
```
|
||||
|
||||
If you encounter a problem, contact LeRobot maintainers on [Discord](https://discord.com/invite/s3KuuzsPFb)
|
||||
@@ -58,7 +38,12 @@ class CompatibilityError(Exception): ...
|
||||
|
||||
class BackwardCompatibilityError(CompatibilityError):
|
||||
def __init__(self, repo_id: str, version: packaging.version.Version):
|
||||
message = V2_MESSAGE.format(repo_id=repo_id, version=version)
|
||||
if version.major == 2 and version.minor == 1:
|
||||
message = V30_MESSAGE.format(repo_id=repo_id, version=version)
|
||||
else:
|
||||
raise NotImplementedError(
|
||||
"Contact the maintainer on [Discord](https://discord.com/invite/s3KuuzsPFb)."
|
||||
)
|
||||
super().__init__(message)
|
||||
|
||||
|
||||
|
||||
@@ -25,6 +25,7 @@ from lerobot.datasets.lerobot_dataset import (
|
||||
LeRobotDatasetMetadata,
|
||||
MultiLeRobotDataset,
|
||||
)
|
||||
from lerobot.datasets.streaming_dataset import StreamingLeRobotDataset
|
||||
from lerobot.datasets.transforms import ImageTransforms
|
||||
|
||||
IMAGENET_STATS = {
|
||||
@@ -87,15 +88,26 @@ def make_dataset(cfg: TrainPipelineConfig) -> LeRobotDataset | MultiLeRobotDatas
|
||||
cfg.dataset.repo_id, root=cfg.dataset.root, revision=cfg.dataset.revision
|
||||
)
|
||||
delta_timestamps = resolve_delta_timestamps(cfg.policy, ds_meta)
|
||||
dataset = LeRobotDataset(
|
||||
cfg.dataset.repo_id,
|
||||
root=cfg.dataset.root,
|
||||
episodes=cfg.dataset.episodes,
|
||||
delta_timestamps=delta_timestamps,
|
||||
image_transforms=image_transforms,
|
||||
revision=cfg.dataset.revision,
|
||||
video_backend=cfg.dataset.video_backend,
|
||||
)
|
||||
if not cfg.dataset.streaming:
|
||||
dataset = LeRobotDataset(
|
||||
cfg.dataset.repo_id,
|
||||
root=cfg.dataset.root,
|
||||
episodes=cfg.dataset.episodes,
|
||||
delta_timestamps=delta_timestamps,
|
||||
image_transforms=image_transforms,
|
||||
revision=cfg.dataset.revision,
|
||||
video_backend=cfg.dataset.video_backend,
|
||||
)
|
||||
else:
|
||||
dataset = StreamingLeRobotDataset(
|
||||
cfg.dataset.repo_id,
|
||||
root=cfg.dataset.root,
|
||||
episodes=cfg.dataset.episodes,
|
||||
delta_timestamps=delta_timestamps,
|
||||
image_transforms=image_transforms,
|
||||
revision=cfg.dataset.revision,
|
||||
max_num_shards=cfg.num_workers,
|
||||
)
|
||||
else:
|
||||
raise NotImplementedError("The MultiLeRobotDataset isn't supported for now.")
|
||||
dataset = MultiLeRobotDataset(
|
||||
|
||||
File diff suppressed because it is too large
Load Diff
@@ -337,13 +337,11 @@ def compute_sampler_weights(
|
||||
if len(offline_dataset) > 0:
|
||||
offline_data_mask_indices = []
|
||||
for start_index, end_index in zip(
|
||||
offline_dataset.episode_data_index["from"],
|
||||
offline_dataset.episode_data_index["to"],
|
||||
offline_dataset.meta.episodes["dataset_from_index"],
|
||||
offline_dataset.meta.episodes["dataset_to_index"],
|
||||
strict=True,
|
||||
):
|
||||
offline_data_mask_indices.extend(
|
||||
range(start_index.item(), end_index.item() - offline_drop_n_last_frames)
|
||||
)
|
||||
offline_data_mask_indices.extend(range(start_index, end_index - offline_drop_n_last_frames))
|
||||
offline_data_mask = torch.zeros(len(offline_dataset), dtype=torch.bool)
|
||||
offline_data_mask[torch.tensor(offline_data_mask_indices)] = True
|
||||
weights.append(
|
||||
|
||||
@@ -0,0 +1,141 @@
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import re
|
||||
from collections.abc import Sequence
|
||||
from typing import Any
|
||||
|
||||
from lerobot.configs.types import PipelineFeatureType
|
||||
from lerobot.constants import ACTION, OBS_IMAGES, OBS_STATE
|
||||
from lerobot.datasets.utils import hw_to_dataset_features
|
||||
from lerobot.processor import DataProcessorPipeline
|
||||
|
||||
|
||||
def create_initial_features(
|
||||
action: dict[str, Any] | None = None, observation: dict[str, Any] | None = None
|
||||
) -> dict[PipelineFeatureType, dict[str, Any]]:
|
||||
"""
|
||||
Creates the initial features dict for the dataset from action and observation specs.
|
||||
|
||||
Args:
|
||||
action: A dictionary of action feature names to their types/shapes.
|
||||
observation: A dictionary of observation feature names to their types/shapes.
|
||||
|
||||
Returns:
|
||||
The initial features dictionary structured by PipelineFeatureType.
|
||||
"""
|
||||
features = {PipelineFeatureType.ACTION: {}, PipelineFeatureType.OBSERVATION: {}}
|
||||
if action:
|
||||
features[PipelineFeatureType.ACTION] = action
|
||||
if observation:
|
||||
features[PipelineFeatureType.OBSERVATION] = observation
|
||||
return features
|
||||
|
||||
|
||||
# Helper to filter state/action keys based on regex patterns.
|
||||
def should_keep(key: str, patterns: tuple[str]) -> bool:
|
||||
if patterns is None:
|
||||
return True
|
||||
return any(re.search(pat, key) for pat in patterns)
|
||||
|
||||
|
||||
def strip_prefix(key: str, prefixes_to_strip: tuple[str]) -> str:
|
||||
for prefix in prefixes_to_strip:
|
||||
if key.startswith(prefix):
|
||||
return key[len(prefix) :]
|
||||
return key
|
||||
|
||||
|
||||
# Define prefixes to strip from feature keys for clean names.
|
||||
# Handles both fully qualified (e.g., "action.state") and short (e.g., "state") forms.
|
||||
PREFIXES_TO_STRIP = tuple(
|
||||
f"{token}." for const in (ACTION, OBS_STATE, OBS_IMAGES) for token in (const, const.split(".")[-1])
|
||||
)
|
||||
|
||||
|
||||
def aggregate_pipeline_dataset_features(
|
||||
pipeline: DataProcessorPipeline,
|
||||
initial_features: dict[PipelineFeatureType, dict[str, Any]],
|
||||
*,
|
||||
use_videos: bool = True,
|
||||
patterns: Sequence[str] | None = None,
|
||||
) -> dict[str, dict]:
|
||||
"""
|
||||
Aggregates and filters pipeline features to create a dataset-ready features dictionary.
|
||||
|
||||
This function transforms initial features using the pipeline, categorizes them as action or observations
|
||||
(image or state), filters them based on `use_videos` and `patterns`, and finally
|
||||
formats them for use with a Hugging Face LeRobot Dataset.
|
||||
|
||||
Args:
|
||||
pipeline: The DataProcessorPipeline to apply.
|
||||
initial_features: A dictionary of raw feature specs for actions and observations.
|
||||
use_videos: If False, image features are excluded.
|
||||
patterns: A sequence of regex patterns to filter action and state features.
|
||||
Image features are not affected by this filter.
|
||||
|
||||
Returns:
|
||||
A dictionary of features formatted for a Hugging Face LeRobot Dataset.
|
||||
"""
|
||||
all_features = pipeline.transform_features(initial_features)
|
||||
|
||||
# Intermediate storage for categorized and filtered features.
|
||||
processed_features: dict[str, dict[str, Any]] = {
|
||||
"action": {},
|
||||
"observation": {},
|
||||
}
|
||||
images_token = OBS_IMAGES.split(".")[-1]
|
||||
|
||||
# Iterate through all features transformed by the pipeline.
|
||||
for ptype, feats in all_features.items():
|
||||
if ptype not in [PipelineFeatureType.ACTION, PipelineFeatureType.OBSERVATION]:
|
||||
continue
|
||||
|
||||
for key, value in feats.items():
|
||||
# 1. Categorize the feature.
|
||||
is_action = ptype == PipelineFeatureType.ACTION
|
||||
# Observations are classified as images if their key matches image-related tokens or if the shape of the feature is 3.
|
||||
# All other observations are treated as state.
|
||||
is_image = not is_action and (
|
||||
(isinstance(value, tuple) and len(value) == 3)
|
||||
or (
|
||||
key.startswith(f"{OBS_IMAGES}.")
|
||||
or key.startswith(f"{images_token}.")
|
||||
or f".{images_token}." in key
|
||||
)
|
||||
)
|
||||
|
||||
# 2. Apply filtering rules.
|
||||
if is_image and not use_videos:
|
||||
continue
|
||||
if not is_image and not should_keep(key, patterns):
|
||||
continue
|
||||
|
||||
# 3. Add the feature to the appropriate group with a clean name.
|
||||
name = strip_prefix(key, PREFIXES_TO_STRIP)
|
||||
if is_action:
|
||||
processed_features["action"][name] = value
|
||||
else:
|
||||
processed_features["observation"][name] = value
|
||||
|
||||
# Convert the processed features into the final dataset format.
|
||||
dataset_features = {}
|
||||
if processed_features["action"]:
|
||||
dataset_features.update(hw_to_dataset_features(processed_features["action"], ACTION, use_videos))
|
||||
if processed_features["observation"]:
|
||||
dataset_features.update(
|
||||
hw_to_dataset_features(processed_features["observation"], "observation", use_videos)
|
||||
)
|
||||
|
||||
return dataset_features
|
||||
@@ -21,7 +21,8 @@ import torch
|
||||
class EpisodeAwareSampler:
|
||||
def __init__(
|
||||
self,
|
||||
episode_data_index: dict,
|
||||
dataset_from_indices: list[int],
|
||||
dataset_to_indices: list[int],
|
||||
episode_indices_to_use: list | None = None,
|
||||
drop_n_first_frames: int = 0,
|
||||
drop_n_last_frames: int = 0,
|
||||
@@ -30,7 +31,8 @@ class EpisodeAwareSampler:
|
||||
"""Sampler that optionally incorporates episode boundary information.
|
||||
|
||||
Args:
|
||||
episode_data_index: Dictionary with keys 'from' and 'to' containing the start and end indices of each episode.
|
||||
dataset_from_indices: List of indices containing the start of each episode in the dataset.
|
||||
dataset_to_indices: List of indices containing the end of each episode in the dataset.
|
||||
episode_indices_to_use: List of episode indices to use. If None, all episodes are used.
|
||||
Assumes that episodes are indexed from 0 to N-1.
|
||||
drop_n_first_frames: Number of frames to drop from the start of each episode.
|
||||
@@ -39,12 +41,10 @@ class EpisodeAwareSampler:
|
||||
"""
|
||||
indices = []
|
||||
for episode_idx, (start_index, end_index) in enumerate(
|
||||
zip(episode_data_index["from"], episode_data_index["to"], strict=True)
|
||||
zip(dataset_from_indices, dataset_to_indices, strict=True)
|
||||
):
|
||||
if episode_indices_to_use is None or episode_idx in episode_indices_to_use:
|
||||
indices.extend(
|
||||
range(start_index.item() + drop_n_first_frames, end_index.item() - drop_n_last_frames)
|
||||
)
|
||||
indices.extend(range(start_index + drop_n_first_frames, end_index - drop_n_last_frames))
|
||||
|
||||
self.indices = indices
|
||||
self.shuffle = shuffle
|
||||
|
||||
@@ -0,0 +1,535 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
from collections.abc import Callable, Generator, Iterator
|
||||
from pathlib import Path
|
||||
|
||||
import datasets
|
||||
import numpy as np
|
||||
import torch
|
||||
from datasets import load_dataset
|
||||
|
||||
from lerobot.constants import HF_LEROBOT_HOME, LOOKAHEAD_BACKTRACKTABLE, LOOKBACK_BACKTRACKTABLE
|
||||
from lerobot.datasets.lerobot_dataset import CODEBASE_VERSION, LeRobotDatasetMetadata
|
||||
from lerobot.datasets.utils import (
|
||||
Backtrackable,
|
||||
LookAheadError,
|
||||
LookBackError,
|
||||
check_version_compatibility,
|
||||
find_float_index,
|
||||
get_delta_indices,
|
||||
is_float_in_list,
|
||||
item_to_torch,
|
||||
safe_shard,
|
||||
)
|
||||
from lerobot.datasets.video_utils import (
|
||||
VideoDecoderCache,
|
||||
decode_video_frames_torchcodec,
|
||||
)
|
||||
|
||||
|
||||
class StreamingLeRobotDataset(torch.utils.data.IterableDataset):
|
||||
"""LeRobotDataset with streaming capabilities.
|
||||
|
||||
This class extends LeRobotDataset to add streaming functionality, allowing data to be streamed
|
||||
rather than loaded entirely into memory. This is especially useful for large datasets that may
|
||||
not fit in memory or when you want to quickly explore a dataset without downloading it completely.
|
||||
|
||||
The key innovation is using a Backtrackable iterator that maintains a bounded buffer of recent
|
||||
items, allowing us to access previous frames for delta timestamps without loading the entire
|
||||
dataset into memory.
|
||||
|
||||
Example:
|
||||
Basic usage:
|
||||
```python
|
||||
from lerobot.common.datasets.streaming_dataset import StreamingLeRobotDataset
|
||||
|
||||
# Create a streaming dataset with delta timestamps
|
||||
delta_timestamps = {
|
||||
"observation.image": [-1.0, -0.5, 0.0], # 1 sec ago, 0.5 sec ago, current
|
||||
"action": [0.0, 0.1, 0.2], # current, 0.1 sec future, 0.2 sec future
|
||||
}
|
||||
|
||||
dataset = StreamingLeRobotDataset(
|
||||
repo_id="your-dataset-repo-id",
|
||||
delta_timestamps=delta_timestamps,
|
||||
streaming=True,
|
||||
buffer_size=1000,
|
||||
)
|
||||
|
||||
# Iterate over the dataset
|
||||
for i, item in enumerate(dataset):
|
||||
print(f"Sample {i}: Episode {item['episode_index']} Frame {item['frame_index']}")
|
||||
# item will contain stacked frames according to delta_timestamps
|
||||
if i >= 10:
|
||||
break
|
||||
```
|
||||
"""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
repo_id: str,
|
||||
root: str | Path | None = None,
|
||||
episodes: list[int] | None = None,
|
||||
image_transforms: Callable | None = None,
|
||||
delta_timestamps: dict[list[float]] | None = None,
|
||||
tolerance_s: float = 1e-4,
|
||||
revision: str | None = None,
|
||||
force_cache_sync: bool = False,
|
||||
streaming: bool = True,
|
||||
buffer_size: int = 1000,
|
||||
max_num_shards: int = 16,
|
||||
seed: int = 42,
|
||||
rng: np.random.Generator | None = None,
|
||||
shuffle: bool = True,
|
||||
):
|
||||
"""Initialize a StreamingLeRobotDataset.
|
||||
|
||||
Args:
|
||||
repo_id (str): This is the repo id that will be used to fetch the dataset.
|
||||
root (Path | None, optional): Local directory to use for downloading/writing files.
|
||||
episodes (list[int] | None, optional): If specified, this will only load episodes specified by
|
||||
their episode_index in this list.
|
||||
image_transforms (Callable | None, optional): Transform to apply to image data.
|
||||
tolerance_s (float, optional): Tolerance in seconds for timestamp matching.
|
||||
revision (str, optional): Git revision id (branch name, tag, or commit hash).
|
||||
force_cache_sync (bool, optional): Flag to sync and refresh local files first.
|
||||
streaming (bool, optional): Whether to stream the dataset or load it all. Defaults to True.
|
||||
buffer_size (int, optional): Buffer size for shuffling when streaming. Defaults to 1000.
|
||||
max_num_shards (int, optional): Number of shards to re-shard the input dataset into. Defaults to 16.
|
||||
seed (int, optional): Reproducibility random seed.
|
||||
rng (np.random.Generator | None, optional): Random number generator.
|
||||
shuffle (bool, optional): Whether to shuffle the dataset across exhaustions. Defaults to True.
|
||||
"""
|
||||
super().__init__()
|
||||
self.repo_id = repo_id
|
||||
self.root = Path(root) if root else HF_LEROBOT_HOME / repo_id
|
||||
self.streaming_from_local = root is not None
|
||||
|
||||
self.image_transforms = image_transforms
|
||||
self.episodes = episodes
|
||||
self.tolerance_s = tolerance_s
|
||||
self.revision = revision if revision else CODEBASE_VERSION
|
||||
self.seed = seed
|
||||
self.rng = rng if rng is not None else np.random.default_rng(seed)
|
||||
self.shuffle = shuffle
|
||||
|
||||
self.streaming = streaming
|
||||
self.buffer_size = buffer_size
|
||||
|
||||
# We cache the video decoders to avoid re-initializing them at each frame (avoiding a ~10x slowdown)
|
||||
self.video_decoder_cache = None
|
||||
|
||||
self.root.mkdir(exist_ok=True, parents=True)
|
||||
|
||||
# Load metadata
|
||||
self.meta = LeRobotDatasetMetadata(
|
||||
self.repo_id, self.root, self.revision, force_cache_sync=force_cache_sync
|
||||
)
|
||||
# Check version
|
||||
check_version_compatibility(self.repo_id, self.meta._version, CODEBASE_VERSION)
|
||||
|
||||
self.delta_timestamps = None
|
||||
self.delta_indices = None
|
||||
|
||||
if delta_timestamps is not None:
|
||||
self._validate_delta_timestamp_keys(delta_timestamps) # raises ValueError if invalid
|
||||
self.delta_timestamps = delta_timestamps
|
||||
self.delta_indices = get_delta_indices(self.delta_timestamps, self.fps)
|
||||
|
||||
self.hf_dataset: datasets.IterableDataset = load_dataset(
|
||||
self.repo_id if not self.streaming_from_local else str(self.root),
|
||||
split="train",
|
||||
streaming=self.streaming,
|
||||
data_files="data/*/*.parquet",
|
||||
revision=self.revision,
|
||||
)
|
||||
|
||||
self.num_shards = min(self.hf_dataset.num_shards, max_num_shards)
|
||||
|
||||
@property
|
||||
def num_frames(self):
|
||||
return self.meta.total_frames
|
||||
|
||||
@property
|
||||
def num_episodes(self):
|
||||
return self.meta.total_episodes
|
||||
|
||||
@property
|
||||
def fps(self):
|
||||
return self.meta.fps
|
||||
|
||||
@staticmethod
|
||||
def _iter_random_indices(
|
||||
rng: np.random.Generator, buffer_size: int, random_batch_size=100
|
||||
) -> Iterator[int]:
|
||||
while True:
|
||||
yield from (int(i) for i in rng.integers(0, buffer_size, size=random_batch_size))
|
||||
|
||||
@staticmethod
|
||||
def _infinite_generator_over_elements(rng: np.random.Generator, elements: list[int]) -> Iterator[int]:
|
||||
while True:
|
||||
yield rng.choice(elements)
|
||||
|
||||
# TODO(fracapuano): Implement multi-threaded prefetching to accelerate data loading.
|
||||
# The current sequential iteration is a bottleneck. A producer-consumer pattern
|
||||
# could be used with a ThreadPoolExecutor to run `make_frame` (especially video decoding)
|
||||
# in parallel, feeding a queue from which this iterator will yield processed items.
|
||||
def __iter__(self) -> Iterator[dict[str, torch.Tensor]]:
|
||||
if self.video_decoder_cache is None:
|
||||
self.video_decoder_cache = VideoDecoderCache()
|
||||
|
||||
# keep the same seed across exhaustions if shuffle is False, otherwise shuffle data across exhaustions
|
||||
rng = np.random.default_rng(self.seed) if not self.shuffle else self.rng
|
||||
|
||||
buffer_indices_generator = self._iter_random_indices(rng, self.buffer_size)
|
||||
|
||||
idx_to_backtrack_dataset = {
|
||||
idx: self._make_backtrackable_dataset(safe_shard(self.hf_dataset, idx, self.num_shards))
|
||||
for idx in range(self.num_shards)
|
||||
}
|
||||
|
||||
# This buffer is populated while iterating on the dataset's shards
|
||||
# the logic is to add 2 levels of randomness:
|
||||
# (1) sample one shard at random from the ones available, and
|
||||
# (2) sample one frame from the shard sampled at (1)
|
||||
frames_buffer = []
|
||||
while available_shards := list(idx_to_backtrack_dataset.keys()):
|
||||
shard_key = next(self._infinite_generator_over_elements(rng, available_shards))
|
||||
backtrack_dataset = idx_to_backtrack_dataset[shard_key] # selects which shard to iterate on
|
||||
|
||||
try:
|
||||
for frame in self.make_frame(backtrack_dataset):
|
||||
if len(frames_buffer) == self.buffer_size:
|
||||
i = next(buffer_indices_generator) # samples a element from the buffer
|
||||
yield frames_buffer[i]
|
||||
frames_buffer[i] = frame
|
||||
else:
|
||||
frames_buffer.append(frame)
|
||||
break # random shard sampled, switch shard
|
||||
except (
|
||||
RuntimeError,
|
||||
StopIteration,
|
||||
): # NOTE: StopIteration inside a generator throws a RuntimeError since python 3.7
|
||||
del idx_to_backtrack_dataset[shard_key] # Remove exhausted shard, onto another shard
|
||||
|
||||
# Once shards are all exhausted, shuffle the buffer and yield the remaining frames
|
||||
rng.shuffle(frames_buffer)
|
||||
yield from frames_buffer
|
||||
|
||||
def _get_window_steps(
|
||||
self, delta_timestamps: dict[str, list[float]] | None = None, dynamic_bounds: bool = False
|
||||
) -> tuple[int, int]:
|
||||
if delta_timestamps is None:
|
||||
return 1, 1
|
||||
|
||||
if not dynamic_bounds:
|
||||
# Fix the windows
|
||||
lookback = LOOKBACK_BACKTRACKTABLE
|
||||
lookahead = LOOKAHEAD_BACKTRACKTABLE
|
||||
else:
|
||||
# Dynamically adjust the windows based on the given delta_timesteps
|
||||
all_timestamps = sum(delta_timestamps.values(), [])
|
||||
lookback = min(all_timestamps) * self.fps
|
||||
lookahead = max(all_timestamps) * self.fps
|
||||
|
||||
# When lookback is >=0 it means no negative timesteps have been provided
|
||||
lookback = 0 if lookback >= 0 else (lookback * -1)
|
||||
|
||||
return lookback, lookahead
|
||||
|
||||
def _make_backtrackable_dataset(self, dataset: datasets.IterableDataset) -> Backtrackable:
|
||||
lookback, lookahead = self._get_window_steps(self.delta_timestamps)
|
||||
return Backtrackable(dataset, history=lookback, lookahead=lookahead)
|
||||
|
||||
def _make_timestamps_from_indices(
|
||||
self, start_ts: float, indices: dict[str, list[int]] | None = None
|
||||
) -> dict[str, list[float]]:
|
||||
if indices is not None:
|
||||
return {
|
||||
key: (
|
||||
start_ts + torch.tensor(indices[key]) / self.fps
|
||||
).tolist() # NOTE: why not delta_timestamps directly?
|
||||
for key in self.delta_timestamps
|
||||
}
|
||||
else:
|
||||
return dict.fromkeys(self.meta.video_keys, [start_ts])
|
||||
|
||||
def _make_padding_camera_frame(self, camera_key: str):
|
||||
"""Variable-shape padding frame for given camera keys, given in (H, W, C)"""
|
||||
return torch.zeros(self.meta.info["features"][camera_key]["shape"]).permute(-1, 0, 1)
|
||||
|
||||
def _get_video_frame_padding_mask(
|
||||
self,
|
||||
video_frames: dict[str, torch.Tensor],
|
||||
query_timestamps: dict[str, list[float]],
|
||||
original_timestamps: dict[str, list[float]],
|
||||
) -> dict[str, torch.BoolTensor]:
|
||||
padding_mask = {}
|
||||
|
||||
for video_key, timestamps in original_timestamps.items():
|
||||
if video_key not in video_frames:
|
||||
continue # only padding on video keys that are available
|
||||
frames = []
|
||||
mask = []
|
||||
padding_frame = self._make_padding_camera_frame(video_key)
|
||||
for ts in timestamps:
|
||||
if is_float_in_list(ts, query_timestamps[video_key]):
|
||||
idx = find_float_index(ts, query_timestamps[video_key])
|
||||
frames.append(video_frames[video_key][idx, :])
|
||||
mask.append(False)
|
||||
else:
|
||||
frames.append(padding_frame)
|
||||
mask.append(True)
|
||||
|
||||
padding_mask[f"{video_key}_is_pad"] = torch.BoolTensor(mask)
|
||||
|
||||
return padding_mask
|
||||
|
||||
def make_frame(
|
||||
self, dataset_iterator: Backtrackable, previous_dataset_iterator: Backtrackable | None = None
|
||||
) -> Generator:
|
||||
"""Makes a frame starting from a dataset iterator"""
|
||||
item = next(dataset_iterator)
|
||||
item = item_to_torch(item)
|
||||
|
||||
updates = [] # list of "updates" to apply to the item retrieved from hf_dataset (w/o camera features)
|
||||
|
||||
# Get episode index from the item
|
||||
ep_idx = item["episode_index"]
|
||||
|
||||
# "timestamp" restarts from 0 for each episode, whereas we need a global timestep within the single .mp4 file (given by index/fps)
|
||||
current_ts = item["index"] / self.fps
|
||||
|
||||
episode_boundaries_ts = {
|
||||
key: (
|
||||
self.meta.episodes[ep_idx][f"videos/{key}/from_timestamp"],
|
||||
self.meta.episodes[ep_idx][f"videos/{key}/to_timestamp"],
|
||||
)
|
||||
for key in self.meta.video_keys
|
||||
}
|
||||
|
||||
# Apply delta querying logic if necessary
|
||||
if self.delta_indices is not None:
|
||||
query_result, padding = self._get_delta_frames(dataset_iterator, item)
|
||||
updates.append(query_result)
|
||||
updates.append(padding)
|
||||
|
||||
# Load video frames, when needed
|
||||
if len(self.meta.video_keys) > 0:
|
||||
original_timestamps = self._make_timestamps_from_indices(current_ts, self.delta_indices)
|
||||
|
||||
# Some timestamps might not result available considering the episode's boundaries
|
||||
query_timestamps = self._get_query_timestamps(
|
||||
current_ts, self.delta_indices, episode_boundaries_ts
|
||||
)
|
||||
video_frames = self._query_videos(query_timestamps, ep_idx)
|
||||
|
||||
if self.image_transforms is not None:
|
||||
image_keys = self.meta.camera_keys
|
||||
for cam in image_keys:
|
||||
video_frames[cam] = self.image_transforms(video_frames[cam])
|
||||
|
||||
updates.append(video_frames)
|
||||
|
||||
if self.delta_indices is not None:
|
||||
# We always return the same number of frames. Unavailable frames are padded.
|
||||
padding_mask = self._get_video_frame_padding_mask(
|
||||
video_frames, query_timestamps, original_timestamps
|
||||
)
|
||||
updates.append(padding_mask)
|
||||
|
||||
result = item.copy()
|
||||
for update in updates:
|
||||
result.update(update)
|
||||
|
||||
result["task"] = self.meta.tasks.iloc[item["task_index"]].name
|
||||
|
||||
yield result
|
||||
|
||||
def _get_query_timestamps(
|
||||
self,
|
||||
current_ts: float,
|
||||
query_indices: dict[str, list[int]] | None = None,
|
||||
episode_boundaries_ts: dict[str, tuple[float, float]] | None = None,
|
||||
) -> dict[str, list[float]]:
|
||||
query_timestamps = {}
|
||||
keys_to_timestamps = self._make_timestamps_from_indices(current_ts, query_indices)
|
||||
for key in self.meta.video_keys:
|
||||
if query_indices is not None and key in query_indices:
|
||||
timestamps = keys_to_timestamps[key]
|
||||
# Clamp out timesteps outside of episode boundaries
|
||||
query_timestamps[key] = torch.clamp(
|
||||
torch.tensor(timestamps), *episode_boundaries_ts[key]
|
||||
).tolist()
|
||||
|
||||
else:
|
||||
query_timestamps[key] = [current_ts]
|
||||
|
||||
return query_timestamps
|
||||
|
||||
def _query_videos(self, query_timestamps: dict[str, list[float]], ep_idx: int) -> dict:
|
||||
"""Note: When using data workers (e.g. DataLoader with num_workers>0), do not call this function
|
||||
in the main process (e.g. by using a second Dataloader with num_workers=0). It will result in a
|
||||
Segmentation Fault. This probably happens because a memory reference to the video loader is created in
|
||||
the main process and a subprocess fails to access it.
|
||||
"""
|
||||
|
||||
item = {}
|
||||
for video_key, query_ts in query_timestamps.items():
|
||||
root = self.meta.url_root if self.streaming and not self.streaming_from_local else self.root
|
||||
video_path = f"{root}/{self.meta.get_video_file_path(ep_idx, video_key)}"
|
||||
frames = decode_video_frames_torchcodec(
|
||||
video_path, query_ts, self.tolerance_s, decoder_cache=self.video_decoder_cache
|
||||
)
|
||||
|
||||
item[video_key] = frames.squeeze(0) if len(query_ts) == 1 else frames
|
||||
|
||||
return item
|
||||
|
||||
def _get_delta_frames(self, dataset_iterator: Backtrackable, current_item: dict):
|
||||
# TODO(fracapuano): Modularize this function, refactor the code
|
||||
"""Get frames with delta offsets using the backtrackable iterator.
|
||||
|
||||
Args:
|
||||
current_item (dict): Current item from the iterator.
|
||||
ep_idx (int): Episode index.
|
||||
|
||||
Returns:
|
||||
tuple: (query_result, padding) - frames at delta offsets and padding info.
|
||||
"""
|
||||
current_episode_idx = current_item["episode_index"]
|
||||
|
||||
# Prepare results
|
||||
query_result = {}
|
||||
padding = {}
|
||||
|
||||
for key, delta_indices in self.delta_indices.items():
|
||||
if key in self.meta.video_keys:
|
||||
continue # visual frames are decoded separately
|
||||
|
||||
target_frames = []
|
||||
is_pad = []
|
||||
|
||||
# Create a results dictionary to store frames in processing order, then reconstruct original order for stacking
|
||||
delta_results = {}
|
||||
|
||||
# Separate and sort deltas by difficulty (easier operations first)
|
||||
negative_deltas = sorted([d for d in delta_indices if d < 0], reverse=True) # [-1, -2, -3, ...]
|
||||
positive_deltas = sorted([d for d in delta_indices if d > 0]) # [1, 2, 3, ...]
|
||||
zero_deltas = [d for d in delta_indices if d == 0]
|
||||
|
||||
# Process zero deltas (current frame)
|
||||
for delta in zero_deltas:
|
||||
delta_results[delta] = (
|
||||
current_item[key],
|
||||
False,
|
||||
)
|
||||
|
||||
# Process negative deltas in order of increasing difficulty
|
||||
lookback_failed = False
|
||||
|
||||
last_successful_frame = current_item[key]
|
||||
|
||||
for delta in negative_deltas:
|
||||
if lookback_failed:
|
||||
delta_results[delta] = (last_successful_frame, True)
|
||||
continue
|
||||
|
||||
try:
|
||||
steps_back = abs(delta)
|
||||
if dataset_iterator.can_peek_back(steps_back):
|
||||
past_item = dataset_iterator.peek_back(steps_back)
|
||||
past_item = item_to_torch(past_item)
|
||||
|
||||
if past_item["episode_index"] == current_episode_idx:
|
||||
delta_results[delta] = (past_item[key], False)
|
||||
last_successful_frame = past_item[key]
|
||||
|
||||
else:
|
||||
raise LookBackError("Retrieved frame is from different episode!")
|
||||
else:
|
||||
raise LookBackError("Cannot go back further than the history buffer!")
|
||||
|
||||
except LookBackError:
|
||||
delta_results[delta] = (last_successful_frame, True)
|
||||
lookback_failed = True # All subsequent negative deltas will also fail
|
||||
|
||||
# Process positive deltas in order of increasing difficulty
|
||||
lookahead_failed = False
|
||||
last_successful_frame = current_item[key]
|
||||
|
||||
for delta in positive_deltas:
|
||||
if lookahead_failed:
|
||||
delta_results[delta] = (last_successful_frame, True)
|
||||
continue
|
||||
|
||||
try:
|
||||
if dataset_iterator.can_peek_ahead(delta):
|
||||
future_item = dataset_iterator.peek_ahead(delta)
|
||||
future_item = item_to_torch(future_item)
|
||||
|
||||
if future_item["episode_index"] == current_episode_idx:
|
||||
delta_results[delta] = (future_item[key], False)
|
||||
last_successful_frame = future_item[key]
|
||||
|
||||
else:
|
||||
raise LookAheadError("Retrieved frame is from different episode!")
|
||||
else:
|
||||
raise LookAheadError("Cannot go ahead further than the lookahead buffer!")
|
||||
|
||||
except LookAheadError:
|
||||
delta_results[delta] = (last_successful_frame, True)
|
||||
lookahead_failed = True # All subsequent positive deltas will also fail
|
||||
|
||||
# Reconstruct original order for stacking
|
||||
for delta in delta_indices:
|
||||
frame, is_padded = delta_results[delta]
|
||||
|
||||
# add batch dimension for stacking
|
||||
target_frames.append(frame) # frame.unsqueeze(0))
|
||||
is_pad.append(is_padded)
|
||||
|
||||
# Stack frames and add to results
|
||||
if target_frames:
|
||||
query_result[key] = torch.stack(target_frames)
|
||||
padding[f"{key}_is_pad"] = torch.BoolTensor(is_pad)
|
||||
|
||||
return query_result, padding
|
||||
|
||||
def _validate_delta_timestamp_keys(self, delta_timestamps: dict[list[float]]) -> None:
|
||||
"""
|
||||
Validate that all keys in delta_timestamps correspond to actual features in the dataset.
|
||||
|
||||
Raises:
|
||||
ValueError: If any delta timestamp key doesn't correspond to a dataset feature.
|
||||
"""
|
||||
if delta_timestamps is None:
|
||||
return
|
||||
|
||||
# Get all available feature keys from the dataset metadata
|
||||
available_features = set(self.meta.features.keys())
|
||||
|
||||
# Get all keys from delta_timestamps
|
||||
delta_keys = set(delta_timestamps.keys())
|
||||
|
||||
# Find any keys that don't correspond to features
|
||||
invalid_keys = delta_keys - available_features
|
||||
|
||||
if invalid_keys:
|
||||
raise ValueError(
|
||||
f"The following delta_timestamp keys do not correspond to dataset features: {invalid_keys}. "
|
||||
f"Available features are: {sorted(available_features)}"
|
||||
)
|
||||
+826
-264
File diff suppressed because it is too large
Load Diff
@@ -1,884 +0,0 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2024 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
"""
|
||||
This script is for internal use to convert all datasets under the 'lerobot' hub user account to v2.
|
||||
|
||||
Note: Since the original Aloha datasets don't use shadow motors, you need to comment those out in
|
||||
lerobot/configs/robot/aloha.yaml before running this script.
|
||||
"""
|
||||
|
||||
import traceback
|
||||
from pathlib import Path
|
||||
from textwrap import dedent
|
||||
|
||||
from lerobot import available_datasets
|
||||
from lerobot.datasets.v2.convert_dataset_v1_to_v2 import convert_dataset
|
||||
from lerobot.robots.aloha.configuration_aloha import AlohaRobotConfig
|
||||
|
||||
LOCAL_DIR = Path("data/")
|
||||
|
||||
# spellchecker:off
|
||||
ALOHA_MOBILE_INFO = {
|
||||
"robot_config": AlohaRobotConfig(),
|
||||
"license": "mit",
|
||||
"url": "https://mobile-aloha.github.io/",
|
||||
"paper": "https://huggingface.co/papers/2401.02117",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{fu2024mobile,
|
||||
author = {Fu, Zipeng and Zhao, Tony Z. and Finn, Chelsea},
|
||||
title = {Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation},
|
||||
booktitle = {arXiv},
|
||||
year = {2024},
|
||||
}""").lstrip(),
|
||||
}
|
||||
ALOHA_STATIC_INFO = {
|
||||
"robot_config": AlohaRobotConfig(),
|
||||
"license": "mit",
|
||||
"url": "https://tonyzhaozh.github.io/aloha/",
|
||||
"paper": "https://huggingface.co/papers/2304.13705",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{Zhao2023LearningFB,
|
||||
title={Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware},
|
||||
author={Tony Zhao and Vikash Kumar and Sergey Levine and Chelsea Finn},
|
||||
journal={RSS},
|
||||
year={2023},
|
||||
volume={abs/2304.13705},
|
||||
url={https://huggingface.co/papers/2304.13705}
|
||||
}""").lstrip(),
|
||||
}
|
||||
PUSHT_INFO = {
|
||||
"license": "mit",
|
||||
"url": "https://diffusion-policy.cs.columbia.edu/",
|
||||
"paper": "https://huggingface.co/papers/2303.04137",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{chi2024diffusionpolicy,
|
||||
author = {Cheng Chi and Zhenjia Xu and Siyuan Feng and Eric Cousineau and Yilun Du and Benjamin Burchfiel and Russ Tedrake and Shuran Song},
|
||||
title ={Diffusion Policy: Visuomotor Policy Learning via Action Diffusion},
|
||||
journal = {The International Journal of Robotics Research},
|
||||
year = {2024},
|
||||
}""").lstrip(),
|
||||
}
|
||||
XARM_INFO = {
|
||||
"license": "mit",
|
||||
"url": "https://www.nicklashansen.com/td-mpc/",
|
||||
"paper": "https://huggingface.co/papers/2203.04955",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{Hansen2022tdmpc,
|
||||
title={Temporal Difference Learning for Model Predictive Control},
|
||||
author={Nicklas Hansen and Xiaolong Wang and Hao Su},
|
||||
booktitle={ICML},
|
||||
year={2022}
|
||||
}
|
||||
"""),
|
||||
}
|
||||
UNITREEH_INFO = {
|
||||
"license": "apache-2.0",
|
||||
}
|
||||
|
||||
DATASETS = {
|
||||
"aloha_mobile_cabinet": {
|
||||
"single_task": "Open the top cabinet, store the pot inside it then close the cabinet.",
|
||||
**ALOHA_MOBILE_INFO,
|
||||
},
|
||||
"aloha_mobile_chair": {
|
||||
"single_task": "Push the chairs in front of the desk to place them against it.",
|
||||
**ALOHA_MOBILE_INFO,
|
||||
},
|
||||
"aloha_mobile_elevator": {
|
||||
"single_task": "Take the elevator to the 1st floor.",
|
||||
**ALOHA_MOBILE_INFO,
|
||||
},
|
||||
"aloha_mobile_shrimp": {
|
||||
"single_task": "Sauté the raw shrimp on both sides, then serve it in the bowl.",
|
||||
**ALOHA_MOBILE_INFO,
|
||||
},
|
||||
"aloha_mobile_wash_pan": {
|
||||
"single_task": "Pick up the pan, rinse it in the sink and then place it in the drying rack.",
|
||||
**ALOHA_MOBILE_INFO,
|
||||
},
|
||||
"aloha_mobile_wipe_wine": {
|
||||
"single_task": "Pick up the wet cloth on the faucet and use it to clean the spilled wine on the table and underneath the glass.",
|
||||
**ALOHA_MOBILE_INFO,
|
||||
},
|
||||
"aloha_static_battery": {
|
||||
"single_task": "Place the battery into the slot of the remote controller.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_static_candy": {"single_task": "Pick up the candy and unwrap it.", **ALOHA_STATIC_INFO},
|
||||
"aloha_static_coffee": {
|
||||
"single_task": "Place the coffee capsule inside the capsule container, then place the cup onto the center of the cup tray, then push the 'Hot Water' and 'Travel Mug' buttons.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_static_coffee_new": {
|
||||
"single_task": "Place the coffee capsule inside the capsule container, then place the cup onto the center of the cup tray.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_static_cups_open": {
|
||||
"single_task": "Pick up the plastic cup and open its lid.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_static_fork_pick_up": {
|
||||
"single_task": "Pick up the fork and place it on the plate.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_static_pingpong_test": {
|
||||
"single_task": "Transfer one of the two balls in the right glass into the left glass, then transfer it back to the right glass.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_static_pro_pencil": {
|
||||
"single_task": "Pick up the pencil with the right arm, hand it over to the left arm then place it back onto the table.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_static_screw_driver": {
|
||||
"single_task": "Pick up the screwdriver with the right arm, hand it over to the left arm then place it into the cup.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_static_tape": {
|
||||
"single_task": "Cut a small piece of tape from the tape dispenser then place it on the cardboard box's edge.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_static_thread_velcro": {
|
||||
"single_task": "Pick up the velcro cable tie with the left arm, then insert the end of the velcro tie into the other end's loop with the right arm.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_static_towel": {
|
||||
"single_task": "Pick up a piece of paper towel and place it on the spilled liquid.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_static_vinh_cup": {
|
||||
"single_task": "Pick up the plastic cup with the right arm, then pop its lid open with the left arm.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_static_vinh_cup_left": {
|
||||
"single_task": "Pick up the plastic cup with the left arm, then pop its lid open with the right arm.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_static_ziploc_slide": {"single_task": "Slide open the ziploc bag.", **ALOHA_STATIC_INFO},
|
||||
"aloha_sim_insertion_scripted": {"single_task": "Insert the peg into the socket.", **ALOHA_STATIC_INFO},
|
||||
"aloha_sim_insertion_scripted_image": {
|
||||
"single_task": "Insert the peg into the socket.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_sim_insertion_human": {"single_task": "Insert the peg into the socket.", **ALOHA_STATIC_INFO},
|
||||
"aloha_sim_insertion_human_image": {
|
||||
"single_task": "Insert the peg into the socket.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_sim_transfer_cube_scripted": {
|
||||
"single_task": "Pick up the cube with the right arm and transfer it to the left arm.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_sim_transfer_cube_scripted_image": {
|
||||
"single_task": "Pick up the cube with the right arm and transfer it to the left arm.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_sim_transfer_cube_human": {
|
||||
"single_task": "Pick up the cube with the right arm and transfer it to the left arm.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"aloha_sim_transfer_cube_human_image": {
|
||||
"single_task": "Pick up the cube with the right arm and transfer it to the left arm.",
|
||||
**ALOHA_STATIC_INFO,
|
||||
},
|
||||
"pusht": {"single_task": "Push the T-shaped block onto the T-shaped target.", **PUSHT_INFO},
|
||||
"pusht_image": {"single_task": "Push the T-shaped block onto the T-shaped target.", **PUSHT_INFO},
|
||||
"unitreeh1_fold_clothes": {"single_task": "Fold the sweatshirt.", **UNITREEH_INFO},
|
||||
"unitreeh1_rearrange_objects": {"single_task": "Put the object into the bin.", **UNITREEH_INFO},
|
||||
"unitreeh1_two_robot_greeting": {
|
||||
"single_task": "Greet the other robot with a high five.",
|
||||
**UNITREEH_INFO,
|
||||
},
|
||||
"unitreeh1_warehouse": {
|
||||
"single_task": "Grab the spray paint on the shelf and place it in the bin on top of the robot dog.",
|
||||
**UNITREEH_INFO,
|
||||
},
|
||||
"xarm_lift_medium": {"single_task": "Pick up the cube and lift it.", **XARM_INFO},
|
||||
"xarm_lift_medium_image": {"single_task": "Pick up the cube and lift it.", **XARM_INFO},
|
||||
"xarm_lift_medium_replay": {"single_task": "Pick up the cube and lift it.", **XARM_INFO},
|
||||
"xarm_lift_medium_replay_image": {"single_task": "Pick up the cube and lift it.", **XARM_INFO},
|
||||
"xarm_push_medium": {"single_task": "Push the cube onto the target.", **XARM_INFO},
|
||||
"xarm_push_medium_image": {"single_task": "Push the cube onto the target.", **XARM_INFO},
|
||||
"xarm_push_medium_replay": {"single_task": "Push the cube onto the target.", **XARM_INFO},
|
||||
"xarm_push_medium_replay_image": {"single_task": "Push the cube onto the target.", **XARM_INFO},
|
||||
"umi_cup_in_the_wild": {
|
||||
"single_task": "Put the cup on the plate.",
|
||||
"license": "apache-2.0",
|
||||
},
|
||||
"asu_table_top": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"paper": "https://link.springer.com/article/10.1007/s10514-023-10129-1",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{zhou2023modularity,
|
||||
title={Modularity through Attention: Efficient Training and Transfer of Language-Conditioned Policies for Robot Manipulation},
|
||||
author={Zhou, Yifan and Sonawani, Shubham and Phielipp, Mariano and Stepputtis, Simon and Amor, Heni},
|
||||
booktitle={Conference on Robot Learning},
|
||||
pages={1684--1695},
|
||||
year={2023},
|
||||
organization={PMLR}
|
||||
}
|
||||
@article{zhou2023learning,
|
||||
title={Learning modular language-conditioned robot policies through attention},
|
||||
author={Zhou, Yifan and Sonawani, Shubham and Phielipp, Mariano and Ben Amor, Heni and Stepputtis, Simon},
|
||||
journal={Autonomous Robots},
|
||||
pages={1--21},
|
||||
year={2023},
|
||||
publisher={Springer}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"austin_buds_dataset": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://ut-austin-rpl.github.io/BUDS-website/",
|
||||
"paper": "https://huggingface.co/papers/2109.13841",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{zhu2022bottom,
|
||||
title={Bottom-Up Skill Discovery From Unsegmented Demonstrations for Long-Horizon Robot Manipulation},
|
||||
author={Zhu, Yifeng and Stone, Peter and Zhu, Yuke},
|
||||
journal={IEEE Robotics and Automation Letters},
|
||||
volume={7},
|
||||
number={2},
|
||||
pages={4126--4133},
|
||||
year={2022},
|
||||
publisher={IEEE}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"austin_sailor_dataset": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://ut-austin-rpl.github.io/sailor/",
|
||||
"paper": "https://huggingface.co/papers/2210.11435",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{nasiriany2022sailor,
|
||||
title={Learning and Retrieval from Prior Data for Skill-based Imitation Learning},
|
||||
author={Soroush Nasiriany and Tian Gao and Ajay Mandlekar and Yuke Zhu},
|
||||
booktitle={Conference on Robot Learning (CoRL)},
|
||||
year={2022}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"austin_sirius_dataset": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://ut-austin-rpl.github.io/sirius/",
|
||||
"paper": "https://huggingface.co/papers/2211.08416",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{liu2022robot,
|
||||
title = {Robot Learning on the Job: Human-in-the-Loop Autonomy and Learning During Deployment},
|
||||
author = {Huihan Liu and Soroush Nasiriany and Lance Zhang and Zhiyao Bao and Yuke Zhu},
|
||||
booktitle = {Robotics: Science and Systems (RSS)},
|
||||
year = {2023}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"berkeley_autolab_ur5": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "cc-by-4.0",
|
||||
"url": "https://sites.google.com/view/berkeley-ur5/home",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@misc{BerkeleyUR5Website,
|
||||
title = {Berkeley {UR5} Demonstration Dataset},
|
||||
author = {Lawrence Yunliang Chen and Simeon Adebola and Ken Goldberg},
|
||||
howpublished = {https://sites.google.com/view/berkeley-ur5/home},
|
||||
}""").lstrip(),
|
||||
},
|
||||
"berkeley_cable_routing": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "cc-by-4.0",
|
||||
"url": "https://sites.google.com/view/cablerouting/home",
|
||||
"paper": "https://huggingface.co/papers/2307.08927",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{luo2023multistage,
|
||||
author = {Jianlan Luo and Charles Xu and Xinyang Geng and Gilbert Feng and Kuan Fang and Liam Tan and Stefan Schaal and Sergey Levine},
|
||||
title = {Multi-Stage Cable Routing through Hierarchical Imitation Learning},
|
||||
journal = {arXiv pre-print},
|
||||
year = {2023},
|
||||
url = {https://huggingface.co/papers/2307.08927},
|
||||
}""").lstrip(),
|
||||
},
|
||||
"berkeley_fanuc_manipulation": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://sites.google.com/berkeley.edu/fanuc-manipulation",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{fanuc_manipulation2023,
|
||||
title={Fanuc Manipulation: A Dataset for Learning-based Manipulation with FANUC Mate 200iD Robot},
|
||||
author={Zhu, Xinghao and Tian, Ran and Xu, Chenfeng and Ding, Mingyu and Zhan, Wei and Tomizuka, Masayoshi},
|
||||
year={2023},
|
||||
}""").lstrip(),
|
||||
},
|
||||
"berkeley_gnm_cory_hall": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"paper": "https://huggingface.co/papers/1709.10489",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{kahn2018self,
|
||||
title={Self-supervised deep reinforcement learning with generalized computation graphs for robot navigation},
|
||||
author={Kahn, Gregory and Villaflor, Adam and Ding, Bosen and Abbeel, Pieter and Levine, Sergey},
|
||||
booktitle={2018 IEEE international conference on robotics and automation (ICRA)},
|
||||
pages={5129--5136},
|
||||
year={2018},
|
||||
organization={IEEE}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"berkeley_gnm_recon": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://sites.google.com/view/recon-robot",
|
||||
"paper": "https://huggingface.co/papers/2104.05859",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{shah2021rapid,
|
||||
title={Rapid Exploration for Open-World Navigation with Latent Goal Models},
|
||||
author={Dhruv Shah and Benjamin Eysenbach and Nicholas Rhinehart and Sergey Levine},
|
||||
booktitle={5th Annual Conference on Robot Learning },
|
||||
year={2021},
|
||||
url={https://openreview.net/forum?id=d_SWJhyKfVw}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"berkeley_gnm_sac_son": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://sites.google.com/view/SACSoN-review",
|
||||
"paper": "https://huggingface.co/papers/2306.01874",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{hirose2023sacson,
|
||||
title={SACSoN: Scalable Autonomous Data Collection for Social Navigation},
|
||||
author={Hirose, Noriaki and Shah, Dhruv and Sridhar, Ajay and Levine, Sergey},
|
||||
journal={arXiv preprint arXiv:2306.01874},
|
||||
year={2023}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"berkeley_mvp": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"paper": "https://huggingface.co/papers/2203.06173",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@InProceedings{Radosavovic2022,
|
||||
title = {Real-World Robot Learning with Masked Visual Pre-training},
|
||||
author = {Ilija Radosavovic and Tete Xiao and Stephen James and Pieter Abbeel and Jitendra Malik and Trevor Darrell},
|
||||
booktitle = {CoRL},
|
||||
year = {2022}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"berkeley_rpt": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"paper": "https://huggingface.co/papers/2306.10007",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{Radosavovic2023,
|
||||
title={Robot Learning with Sensorimotor Pre-training},
|
||||
author={Ilija Radosavovic and Baifeng Shi and Letian Fu and Ken Goldberg and Trevor Darrell and Jitendra Malik},
|
||||
year={2023},
|
||||
journal={arXiv:2306.10007}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"cmu_franka_exploration_dataset": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://human-world-model.github.io/",
|
||||
"paper": "https://huggingface.co/papers/2308.10901",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{mendonca2023structured,
|
||||
title={Structured World Models from Human Videos},
|
||||
author={Mendonca, Russell and Bahl, Shikhar and Pathak, Deepak},
|
||||
journal={RSS},
|
||||
year={2023}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"cmu_play_fusion": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://play-fusion.github.io/",
|
||||
"paper": "https://huggingface.co/papers/2312.04549",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{chen2023playfusion,
|
||||
title={PlayFusion: Skill Acquisition via Diffusion from Language-Annotated Play},
|
||||
author={Chen, Lili and Bahl, Shikhar and Pathak, Deepak},
|
||||
booktitle={CoRL},
|
||||
year={2023}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"cmu_stretch": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://robo-affordances.github.io/",
|
||||
"paper": "https://huggingface.co/papers/2304.08488",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{bahl2023affordances,
|
||||
title={Affordances from Human Videos as a Versatile Representation for Robotics},
|
||||
author={Bahl, Shikhar and Mendonca, Russell and Chen, Lili and Jain, Unnat and Pathak, Deepak},
|
||||
booktitle={CVPR},
|
||||
year={2023}
|
||||
}
|
||||
@article{mendonca2023structured,
|
||||
title={Structured World Models from Human Videos},
|
||||
author={Mendonca, Russell and Bahl, Shikhar and Pathak, Deepak},
|
||||
journal={CoRL},
|
||||
year={2023}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"columbia_cairlab_pusht_real": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://diffusion-policy.cs.columbia.edu/",
|
||||
"paper": "https://huggingface.co/papers/2303.04137",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{chi2023diffusionpolicy,
|
||||
title={Diffusion Policy: Visuomotor Policy Learning via Action Diffusion},
|
||||
author={Chi, Cheng and Feng, Siyuan and Du, Yilun and Xu, Zhenjia and Cousineau, Eric and Burchfiel, Benjamin and Song, Shuran},
|
||||
booktitle={Proceedings of Robotics: Science and Systems (RSS)},
|
||||
year={2023}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"conq_hose_manipulation": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://sites.google.com/view/conq-hose-manipulation-dataset/home",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@misc{ConqHoseManipData,
|
||||
author={Peter Mitrano and Dmitry Berenson},
|
||||
title={Conq Hose Manipulation Dataset, v1.15.0},
|
||||
year={2024},
|
||||
howpublished={https://sites.google.com/view/conq-hose-manipulation-dataset}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"dlr_edan_shared_control": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"paper": "https://ieeexplore.ieee.org/document/9341156",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{vogel_edan_2020,
|
||||
title = {EDAN - an EMG-Controlled Daily Assistant to Help People with Physical Disabilities},
|
||||
language = {en},
|
||||
booktitle = {2020 {IEEE}/{RSJ} {International} {Conference} on {Intelligent} {Robots} and {Systems} ({IROS})},
|
||||
author = {Vogel, Jörn and Hagengruber, Annette and Iskandar, Maged and Quere, Gabriel and Leipscher, Ulrike and Bustamante, Samuel and Dietrich, Alexander and Hoeppner, Hannes and Leidner, Daniel and Albu-Schäffer, Alin},
|
||||
year = {2020}
|
||||
}
|
||||
@inproceedings{quere_shared_2020,
|
||||
address = {Paris, France},
|
||||
title = {Shared {Control} {Templates} for {Assistive} {Robotics}},
|
||||
language = {en},
|
||||
booktitle = {2020 {IEEE} {International} {Conference} on {Robotics} and {Automation} ({ICRA})},
|
||||
author = {Quere, Gabriel and Hagengruber, Annette and Iskandar, Maged and Bustamante, Samuel and Leidner, Daniel and Stulp, Freek and Vogel, Joern},
|
||||
year = {2020},
|
||||
pages = {7},
|
||||
}""").lstrip(),
|
||||
},
|
||||
"dlr_sara_grid_clamp": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"paper": "https://www.researchsquare.com/article/rs-3289569/v1",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{padalkar2023guided,
|
||||
title={A guided reinforcement learning approach using shared control templates for learning manipulation skills in the real world},
|
||||
author={Padalkar, Abhishek and Quere, Gabriel and Raffin, Antonin and Silv{\'e}rio, Jo{\~a}o and Stulp, Freek},
|
||||
journal={Research square preprint rs-3289569/v1},
|
||||
year={2023}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"dlr_sara_pour": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"paper": "https://elib.dlr.de/193739/1/padalkar2023rlsct.pdf",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{padalkar2023guiding,
|
||||
title={Guiding Reinforcement Learning with Shared Control Templates},
|
||||
author={Padalkar, Abhishek and Quere, Gabriel and Steinmetz, Franz and Raffin, Antonin and Nieuwenhuisen, Matthias and Silv{\'e}rio, Jo{\~a}o and Stulp, Freek},
|
||||
booktitle={40th IEEE International Conference on Robotics and Automation, ICRA 2023},
|
||||
year={2023},
|
||||
organization={IEEE}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"droid_100": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://droid-dataset.github.io/",
|
||||
"paper": "https://huggingface.co/papers/2403.12945",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{khazatsky2024droid,
|
||||
title = {DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset},
|
||||
author = {Alexander Khazatsky and Karl Pertsch and Suraj Nair and Ashwin Balakrishna and Sudeep Dasari and Siddharth Karamcheti and Soroush Nasiriany and Mohan Kumar Srirama and Lawrence Yunliang Chen and Kirsty Ellis and Peter David Fagan and Joey Hejna and Masha Itkina and Marion Lepert and Yecheng Jason Ma and Patrick Tree Miller and Jimmy Wu and Suneel Belkhale and Shivin Dass and Huy Ha and Arhan Jain and Abraham Lee and Youngwoon Lee and Marius Memmel and Sungjae Park and Ilija Radosavovic and Kaiyuan Wang and Albert Zhan and Kevin Black and Cheng Chi and Kyle Beltran Hatch and Shan Lin and Jingpei Lu and Jean Mercat and Abdul Rehman and Pannag R Sanketi and Archit Sharma and Cody Simpson and Quan Vuong and Homer Rich Walke and Blake Wulfe and Ted Xiao and Jonathan Heewon Yang and Arefeh Yavary and Tony Z. Zhao and Christopher Agia and Rohan Baijal and Mateo Guaman Castro and Daphne Chen and Qiuyu Chen and Trinity Chung and Jaimyn Drake and Ethan Paul Foster and Jensen Gao and David Antonio Herrera and Minho Heo and Kyle Hsu and Jiaheng Hu and Donovon Jackson and Charlotte Le and Yunshuang Li and Kevin Lin and Roy Lin and Zehan Ma and Abhiram Maddukuri and Suvir Mirchandani and Daniel Morton and Tony Nguyen and Abigail O'Neill and Rosario Scalise and Derick Seale and Victor Son and Stephen Tian and Emi Tran and Andrew E. Wang and Yilin Wu and Annie Xie and Jingyun Yang and Patrick Yin and Yunchu Zhang and Osbert Bastani and Glen Berseth and Jeannette Bohg and Ken Goldberg and Abhinav Gupta and Abhishek Gupta and Dinesh Jayaraman and Joseph J Lim and Jitendra Malik and Roberto Martín-Martín and Subramanian Ramamoorthy and Dorsa Sadigh and Shuran Song and Jiajun Wu and Michael C. Yip and Yuke Zhu and Thomas Kollar and Sergey Levine and Chelsea Finn},
|
||||
year = {2024},
|
||||
}""").lstrip(),
|
||||
},
|
||||
"fmb": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "cc-by-4.0",
|
||||
"url": "https://functional-manipulation-benchmark.github.io/",
|
||||
"paper": "https://huggingface.co/papers/2401.08553",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{luo2024fmb,
|
||||
title={FMB: a Functional Manipulation Benchmark for Generalizable Robotic Learning},
|
||||
author={Luo, Jianlan and Xu, Charles and Liu, Fangchen and Tan, Liam and Lin, Zipeng and Wu, Jeffrey and Abbeel, Pieter and Levine, Sergey},
|
||||
journal={arXiv preprint arXiv:2401.08553},
|
||||
year={2024}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"iamlab_cmu_pickup_insert": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://openreview.net/forum?id=WuBv9-IGDUA",
|
||||
"paper": "https://huggingface.co/papers/2401.14502",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{saxena2023multiresolution,
|
||||
title={Multi-Resolution Sensing for Real-Time Control with Vision-Language Models},
|
||||
author={Saumya Saxena and Mohit Sharma and Oliver Kroemer},
|
||||
booktitle={7th Annual Conference on Robot Learning},
|
||||
year={2023},
|
||||
url={https://openreview.net/forum?id=WuBv9-IGDUA}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"imperialcollege_sawyer_wrist_cam": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
},
|
||||
"jaco_play": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "cc-by-4.0",
|
||||
"url": "https://github.com/clvrai/clvr_jaco_play_dataset",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@software{dass2023jacoplay,
|
||||
author = {Dass, Shivin and Yapeter, Jullian and Zhang, Jesse and Zhang, Jiahui
|
||||
and Pertsch, Karl and Nikolaidis, Stefanos and Lim, Joseph J.},
|
||||
title = {CLVR Jaco Play Dataset},
|
||||
url = {https://github.com/clvrai/clvr_jaco_play_dataset},
|
||||
version = {1.0.0},
|
||||
year = {2023}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"kaist_nonprehensile": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "cc-by-4.0",
|
||||
"url": "https://github.com/JaeHyung-Kim/rlds_dataset_builder",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{kimpre,
|
||||
title={Pre-and post-contact policy decomposition for non-prehensile manipulation with zero-shot sim-to-real transfer},
|
||||
author={Kim, Minchan and Han, Junhyek and Kim, Jaehyung and Kim, Beomjoon},
|
||||
booktitle={2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
|
||||
year={2023},
|
||||
organization={IEEE}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"nyu_door_opening_surprising_effectiveness": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://jyopari.github.io/VINN/",
|
||||
"paper": "https://huggingface.co/papers/2112.01511",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@misc{pari2021surprising,
|
||||
title={The Surprising Effectiveness of Representation Learning for Visual Imitation},
|
||||
author={Jyothish Pari and Nur Muhammad Shafiullah and Sridhar Pandian Arunachalam and Lerrel Pinto},
|
||||
year={2021},
|
||||
eprint={2112.01511},
|
||||
archivePrefix={arXiv},
|
||||
primaryClass={cs.RO}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"nyu_franka_play_dataset": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://play-to-policy.github.io/",
|
||||
"paper": "https://huggingface.co/papers/2210.10047",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{cui2022play,
|
||||
title = {From Play to Policy: Conditional Behavior Generation from Uncurated Robot Data},
|
||||
author = {Cui, Zichen Jeff and Wang, Yibin and Shafiullah, Nur Muhammad Mahi and Pinto, Lerrel},
|
||||
journal = {arXiv preprint arXiv:2210.10047},
|
||||
year = {2022}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"nyu_rot_dataset": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://rot-robot.github.io/",
|
||||
"paper": "https://huggingface.co/papers/2206.15469",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{haldar2023watch,
|
||||
title={Watch and match: Supercharging imitation with regularized optimal transport},
|
||||
author={Haldar, Siddhant and Mathur, Vaibhav and Yarats, Denis and Pinto, Lerrel},
|
||||
booktitle={Conference on Robot Learning},
|
||||
pages={32--43},
|
||||
year={2023},
|
||||
organization={PMLR}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"roboturk": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://roboturk.stanford.edu/dataset_real.html",
|
||||
"paper": "PAPER",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{mandlekar2019scaling,
|
||||
title={Scaling robot supervision to hundreds of hours with roboturk: Robotic manipulation dataset through human reasoning and dexterity},
|
||||
author={Mandlekar, Ajay and Booher, Jonathan and Spero, Max and Tung, Albert and Gupta, Anchit and Zhu, Yuke and Garg, Animesh and Savarese, Silvio and Fei-Fei, Li},
|
||||
booktitle={2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
|
||||
pages={1048--1055},
|
||||
year={2019},
|
||||
organization={IEEE}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"stanford_hydra_dataset": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://sites.google.com/view/hydra-il-2023",
|
||||
"paper": "https://huggingface.co/papers/2306.17237",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{belkhale2023hydra,
|
||||
title={HYDRA: Hybrid Robot Actions for Imitation Learning},
|
||||
author={Belkhale, Suneel and Cui, Yuchen and Sadigh, Dorsa},
|
||||
journal={arxiv},
|
||||
year={2023}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"stanford_kuka_multimodal_dataset": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://sites.google.com/view/visionandtouch",
|
||||
"paper": "https://huggingface.co/papers/1810.10191",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{lee2019icra,
|
||||
title={Making sense of vision and touch: Self-supervised learning of multimodal representations for contact-rich tasks},
|
||||
author={Lee, Michelle A and Zhu, Yuke and Srinivasan, Krishnan and Shah, Parth and Savarese, Silvio and Fei-Fei, Li and Garg, Animesh and Bohg, Jeannette},
|
||||
booktitle={2019 IEEE International Conference on Robotics and Automation (ICRA)},
|
||||
year={2019},
|
||||
url={https://huggingface.co/papers/1810.10191}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"stanford_robocook": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://hshi74.github.io/robocook/",
|
||||
"paper": "https://huggingface.co/papers/2306.14447",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{shi2023robocook,
|
||||
title={RoboCook: Long-Horizon Elasto-Plastic Object Manipulation with Diverse Tools},
|
||||
author={Shi, Haochen and Xu, Huazhe and Clarke, Samuel and Li, Yunzhu and Wu, Jiajun},
|
||||
journal={arXiv preprint arXiv:2306.14447},
|
||||
year={2023}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"taco_play": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "cc-by-4.0",
|
||||
"url": "https://www.kaggle.com/datasets/oiermees/taco-robot",
|
||||
"paper": "https://huggingface.co/papers/2209.08959, https://huggingface.co/papers/2210.01911",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{rosete2022tacorl,
|
||||
author = {Erick Rosete-Beas and Oier Mees and Gabriel Kalweit and Joschka Boedecker and Wolfram Burgard},
|
||||
title = {Latent Plans for Task Agnostic Offline Reinforcement Learning},
|
||||
journal = {Proceedings of the 6th Conference on Robot Learning (CoRL)},
|
||||
year = {2022}
|
||||
}
|
||||
@inproceedings{mees23hulc2,
|
||||
title={Grounding Language with Visual Affordances over Unstructured Data},
|
||||
author={Oier Mees and Jessica Borja-Diaz and Wolfram Burgard},
|
||||
booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
|
||||
year={2023},
|
||||
address = {London, UK}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"tokyo_u_lsmo": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "URL",
|
||||
"paper": "https://huggingface.co/papers/2107.05842",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@Article{Osa22,
|
||||
author = {Takayuki Osa},
|
||||
journal = {The International Journal of Robotics Research},
|
||||
title = {Motion Planning by Learning the Solution Manifold in Trajectory Optimization},
|
||||
year = {2022},
|
||||
number = {3},
|
||||
pages = {291--311},
|
||||
volume = {41},
|
||||
}""").lstrip(),
|
||||
},
|
||||
"toto": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://toto-benchmark.org/",
|
||||
"paper": "https://huggingface.co/papers/2306.00942",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{zhou2023train,
|
||||
author={Zhou, Gaoyue and Dean, Victoria and Srirama, Mohan Kumar and Rajeswaran, Aravind and Pari, Jyothish and Hatch, Kyle and Jain, Aryan and Yu, Tianhe and Abbeel, Pieter and Pinto, Lerrel and Finn, Chelsea and Gupta, Abhinav},
|
||||
booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},
|
||||
title={Train Offline, Test Online: A Real Robot Learning Benchmark},
|
||||
year={2023},
|
||||
}""").lstrip(),
|
||||
},
|
||||
"ucsd_kitchen_dataset": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@ARTICLE{ucsd_kitchens,
|
||||
author = {Ge Yan, Kris Wu, and Xiaolong Wang},
|
||||
title = {{ucsd kitchens Dataset}},
|
||||
year = {2023},
|
||||
month = {August}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"ucsd_pick_and_place_dataset": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://owmcorl.github.io/#",
|
||||
"paper": "https://huggingface.co/papers/2310.16029",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@preprint{Feng2023Finetuning,
|
||||
title={Finetuning Offline World Models in the Real World},
|
||||
author={Yunhai Feng, Nicklas Hansen, Ziyan Xiong, Chandramouli Rajagopalan, Xiaolong Wang},
|
||||
year={2023}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"uiuc_d3field": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://robopil.github.io/d3fields/",
|
||||
"paper": "https://huggingface.co/papers/2309.16118",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{wang2023d3field,
|
||||
title={D^3Field: Dynamic 3D Descriptor Fields for Generalizable Robotic Manipulation},
|
||||
author={Wang, Yixuan and Li, Zhuoran and Zhang, Mingtong and Driggs-Campbell, Katherine and Wu, Jiajun and Fei-Fei, Li and Li, Yunzhu},
|
||||
journal={arXiv preprint arXiv:},
|
||||
year={2023},
|
||||
}""").lstrip(),
|
||||
},
|
||||
"usc_cloth_sim": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://uscresl.github.io/dmfd/",
|
||||
"paper": "https://huggingface.co/papers/2207.10148",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{salhotra2022dmfd,
|
||||
author={Salhotra, Gautam and Liu, I-Chun Arthur and Dominguez-Kuhne, Marcus and Sukhatme, Gaurav S.},
|
||||
journal={IEEE Robotics and Automation Letters},
|
||||
title={Learning Deformable Object Manipulation From Expert Demonstrations},
|
||||
year={2022},
|
||||
volume={7},
|
||||
number={4},
|
||||
pages={8775-8782},
|
||||
doi={10.1109/LRA.2022.3187843}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"utaustin_mutex": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://ut-austin-rpl.github.io/MUTEX/",
|
||||
"paper": "https://huggingface.co/papers/2309.14320",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@inproceedings{shah2023mutex,
|
||||
title={{MUTEX}: Learning Unified Policies from Multimodal Task Specifications},
|
||||
author={Rutav Shah and Roberto Mart{\'\i}n-Mart{\'\i}n and Yuke Zhu},
|
||||
booktitle={7th Annual Conference on Robot Learning},
|
||||
year={2023},
|
||||
url={https://openreview.net/forum?id=PwqiqaaEzJ}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"utokyo_pr2_opening_fridge": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@misc{oh2023pr2utokyodatasets,
|
||||
author={Jihoon Oh and Naoaki Kanazawa and Kento Kawaharazuka},
|
||||
title={X-Embodiment U-Tokyo PR2 Datasets},
|
||||
year={2023},
|
||||
url={https://github.com/ojh6404/rlds_dataset_builder},
|
||||
}""").lstrip(),
|
||||
},
|
||||
"utokyo_pr2_tabletop_manipulation": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@misc{oh2023pr2utokyodatasets,
|
||||
author={Jihoon Oh and Naoaki Kanazawa and Kento Kawaharazuka},
|
||||
title={X-Embodiment U-Tokyo PR2 Datasets},
|
||||
year={2023},
|
||||
url={https://github.com/ojh6404/rlds_dataset_builder},
|
||||
}""").lstrip(),
|
||||
},
|
||||
"utokyo_saytap": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://saytap.github.io/",
|
||||
"paper": "https://huggingface.co/papers/2306.07580",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{saytap2023,
|
||||
author = {Yujin Tang and Wenhao Yu and Jie Tan and Heiga Zen and Aleksandra Faust and
|
||||
Tatsuya Harada},
|
||||
title = {SayTap: Language to Quadrupedal Locomotion},
|
||||
eprint = {arXiv:2306.07580},
|
||||
url = {https://saytap.github.io},
|
||||
note = {https://saytap.github.io},
|
||||
year = {2023}
|
||||
}""").lstrip(),
|
||||
},
|
||||
"utokyo_xarm_bimanual": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "cc-by-4.0",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@misc{matsushima2023weblab,
|
||||
title={Weblab xArm Dataset},
|
||||
author={Tatsuya Matsushima and Hiroki Furuta and Yusuke Iwasawa and Yutaka Matsuo},
|
||||
year={2023},
|
||||
}""").lstrip(),
|
||||
},
|
||||
"utokyo_xarm_pick_and_place": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "cc-by-4.0",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@misc{matsushima2023weblab,
|
||||
title={Weblab xArm Dataset},
|
||||
author={Tatsuya Matsushima and Hiroki Furuta and Yusuke Iwasawa and Yutaka Matsuo},
|
||||
year={2023},
|
||||
}""").lstrip(),
|
||||
},
|
||||
"viola": {
|
||||
"tasks_col": "language_instruction",
|
||||
"license": "mit",
|
||||
"url": "https://ut-austin-rpl.github.io/VIOLA/",
|
||||
"paper": "https://huggingface.co/papers/2210.11339",
|
||||
"citation_bibtex": dedent(r"""
|
||||
@article{zhu2022viola,
|
||||
title={VIOLA: Imitation Learning for Vision-Based Manipulation with Object Proposal Priors},
|
||||
author={Zhu, Yifeng and Joshi, Abhishek and Stone, Peter and Zhu, Yuke},
|
||||
journal={6th Annual Conference on Robot Learning (CoRL)},
|
||||
year={2022}
|
||||
}""").lstrip(),
|
||||
},
|
||||
}
|
||||
# spellchecker:on
|
||||
|
||||
|
||||
def batch_convert():
|
||||
status = {}
|
||||
logfile = LOCAL_DIR / "conversion_log.txt"
|
||||
assert set(DATASETS) == {id_.split("/")[1] for id_ in available_datasets}
|
||||
for num, (name, kwargs) in enumerate(DATASETS.items()):
|
||||
repo_id = f"lerobot/{name}"
|
||||
print(f"\nConverting {repo_id} ({num}/{len(DATASETS)})")
|
||||
print("---------------------------------------------------------")
|
||||
try:
|
||||
convert_dataset(repo_id, LOCAL_DIR, **kwargs)
|
||||
status = f"{repo_id}: success."
|
||||
with open(logfile, "a") as file:
|
||||
file.write(status + "\n")
|
||||
except Exception:
|
||||
status = f"{repo_id}: failed\n {traceback.format_exc()}"
|
||||
with open(logfile, "a") as file:
|
||||
file.write(status + "\n")
|
||||
continue
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
batch_convert()
|
||||
@@ -1,687 +0,0 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2024 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
"""
|
||||
This script will help you convert any LeRobot dataset already pushed to the hub from codebase version 1.6 to
|
||||
2.0. You will be required to provide the 'tasks', which is a short but accurate description in plain English
|
||||
for each of the task performed in the dataset. This will allow to easily train models with task-conditioning.
|
||||
|
||||
We support 3 different scenarios for these tasks (see instructions below):
|
||||
1. Single task dataset: all episodes of your dataset have the same single task.
|
||||
2. Single task episodes: the episodes of your dataset each contain a single task but they can differ from
|
||||
one episode to the next.
|
||||
3. Multi task episodes: episodes of your dataset may each contain several different tasks.
|
||||
|
||||
|
||||
Can you can also provide a robot config .yaml file (not mandatory) to this script via the option
|
||||
'--robot-config' so that it writes information about the robot (robot type, motors names) this dataset was
|
||||
recorded with. For now, only Aloha/Koch type robots are supported with this option.
|
||||
|
||||
|
||||
# 1. Single task dataset
|
||||
If your dataset contains a single task, you can simply provide it directly via the CLI with the
|
||||
'--single-task' option.
|
||||
|
||||
Examples:
|
||||
|
||||
```bash
|
||||
python -m lerobot.datasets.v2.convert_dataset_v1_to_v2 \
|
||||
--repo-id lerobot/aloha_sim_insertion_human_image \
|
||||
--single-task "Insert the peg into the socket." \
|
||||
--robot-config lerobot/configs/robot/aloha.yaml \
|
||||
--local-dir data
|
||||
```
|
||||
|
||||
```bash
|
||||
python -m lerobot.datasets.v2.convert_dataset_v1_to_v2 \
|
||||
--repo-id aliberts/koch_tutorial \
|
||||
--single-task "Pick the Lego block and drop it in the box on the right." \
|
||||
--robot-config lerobot/configs/robot/koch.yaml \
|
||||
--local-dir data
|
||||
```
|
||||
|
||||
|
||||
# 2. Single task episodes
|
||||
If your dataset is a multi-task dataset, you have two options to provide the tasks to this script:
|
||||
|
||||
- If your dataset already contains a language instruction column in its parquet file, you can simply provide
|
||||
this column's name with the '--tasks-col' arg.
|
||||
|
||||
Example:
|
||||
|
||||
```bash
|
||||
python -m lerobot.datasets.v2.convert_dataset_v1_to_v2 \
|
||||
--repo-id lerobot/stanford_kuka_multimodal_dataset \
|
||||
--tasks-col "language_instruction" \
|
||||
--local-dir data
|
||||
```
|
||||
|
||||
- If your dataset doesn't contain a language instruction, you should provide the path to a .json file with the
|
||||
'--tasks-path' arg. This file should have the following structure where keys correspond to each
|
||||
episode_index in the dataset, and values are the language instruction for that episode.
|
||||
|
||||
Example:
|
||||
|
||||
```json
|
||||
{
|
||||
"0": "Do something",
|
||||
"1": "Do something else",
|
||||
"2": "Do something",
|
||||
"3": "Go there",
|
||||
...
|
||||
}
|
||||
```
|
||||
|
||||
# 3. Multi task episodes
|
||||
If you have multiple tasks per episodes, your dataset should contain a language instruction column in its
|
||||
parquet file, and you must provide this column's name with the '--tasks-col' arg.
|
||||
|
||||
Example:
|
||||
|
||||
```bash
|
||||
python -m lerobot.datasets.v2.convert_dataset_v1_to_v2 \
|
||||
--repo-id lerobot/stanford_kuka_multimodal_dataset \
|
||||
--tasks-col "language_instruction" \
|
||||
--local-dir data
|
||||
```
|
||||
"""
|
||||
|
||||
import argparse
|
||||
import contextlib
|
||||
import filecmp
|
||||
import json
|
||||
import logging
|
||||
import math
|
||||
import shutil
|
||||
import subprocess
|
||||
import tempfile
|
||||
from pathlib import Path
|
||||
|
||||
import datasets
|
||||
import pyarrow.compute as pc
|
||||
import pyarrow.parquet as pq
|
||||
import torch
|
||||
from datasets import Dataset
|
||||
from huggingface_hub import HfApi
|
||||
from huggingface_hub.errors import EntryNotFoundError, HfHubHTTPError
|
||||
from safetensors.torch import load_file
|
||||
|
||||
from lerobot.datasets.utils import (
|
||||
DEFAULT_CHUNK_SIZE,
|
||||
DEFAULT_PARQUET_PATH,
|
||||
DEFAULT_VIDEO_PATH,
|
||||
EPISODES_PATH,
|
||||
INFO_PATH,
|
||||
STATS_PATH,
|
||||
TASKS_PATH,
|
||||
create_branch,
|
||||
create_lerobot_dataset_card,
|
||||
flatten_dict,
|
||||
get_safe_version,
|
||||
load_json,
|
||||
unflatten_dict,
|
||||
write_json,
|
||||
write_jsonlines,
|
||||
)
|
||||
from lerobot.datasets.video_utils import (
|
||||
VideoFrame, # noqa: F401
|
||||
get_image_pixel_channels,
|
||||
get_video_info,
|
||||
)
|
||||
from lerobot.robots import RobotConfig
|
||||
|
||||
V16 = "v1.6"
|
||||
V20 = "v2.0"
|
||||
|
||||
GITATTRIBUTES_REF = "aliberts/gitattributes_reference"
|
||||
V1_VIDEO_FILE = "{video_key}_episode_{episode_index:06d}.mp4"
|
||||
V1_INFO_PATH = "meta_data/info.json"
|
||||
V1_STATS_PATH = "meta_data/stats.safetensors"
|
||||
|
||||
|
||||
def parse_robot_config(robot_cfg: RobotConfig) -> tuple[str, dict]:
|
||||
if robot_cfg.type in ["aloha", "koch"]:
|
||||
state_names = [
|
||||
f"{arm}_{motor}" if len(robot_cfg.follower_arms) > 1 else motor
|
||||
for arm in robot_cfg.follower_arms
|
||||
for motor in robot_cfg.follower_arms[arm].motors
|
||||
]
|
||||
action_names = [
|
||||
# f"{arm}_{motor}" for arm in ["left", "right"] for motor in robot_cfg["leader_arms"][arm]["motors"]
|
||||
f"{arm}_{motor}" if len(robot_cfg.leader_arms) > 1 else motor
|
||||
for arm in robot_cfg.leader_arms
|
||||
for motor in robot_cfg.leader_arms[arm].motors
|
||||
]
|
||||
# elif robot_cfg["robot_type"] == "stretch3": TODO
|
||||
else:
|
||||
raise NotImplementedError(
|
||||
"Please provide robot_config={'robot_type': ..., 'names': ...} directly to convert_dataset()."
|
||||
)
|
||||
|
||||
return {
|
||||
"robot_type": robot_cfg.type,
|
||||
"names": {
|
||||
"observation.state": state_names,
|
||||
"observation.effort": state_names,
|
||||
"action": action_names,
|
||||
},
|
||||
}
|
||||
|
||||
|
||||
def convert_stats_to_json(v1_dir: Path, v2_dir: Path) -> None:
|
||||
safetensor_path = v1_dir / V1_STATS_PATH
|
||||
stats = load_file(safetensor_path)
|
||||
serialized_stats = {key: value.tolist() for key, value in stats.items()}
|
||||
serialized_stats = unflatten_dict(serialized_stats)
|
||||
|
||||
json_path = v2_dir / STATS_PATH
|
||||
json_path.parent.mkdir(exist_ok=True, parents=True)
|
||||
with open(json_path, "w") as f:
|
||||
json.dump(serialized_stats, f, indent=4)
|
||||
|
||||
# Sanity check
|
||||
with open(json_path) as f:
|
||||
stats_json = json.load(f)
|
||||
|
||||
stats_json = flatten_dict(stats_json)
|
||||
stats_json = {key: torch.tensor(value) for key, value in stats_json.items()}
|
||||
for key in stats:
|
||||
torch.testing.assert_close(stats_json[key], stats[key])
|
||||
|
||||
|
||||
def get_features_from_hf_dataset(
|
||||
dataset: Dataset, robot_config: RobotConfig | None = None
|
||||
) -> dict[str, list]:
|
||||
robot_config = parse_robot_config(robot_config)
|
||||
features = {}
|
||||
for key, ft in dataset.features.items():
|
||||
if isinstance(ft, datasets.Value):
|
||||
dtype = ft.dtype
|
||||
shape = (1,)
|
||||
names = None
|
||||
if isinstance(ft, datasets.Sequence):
|
||||
assert isinstance(ft.feature, datasets.Value)
|
||||
dtype = ft.feature.dtype
|
||||
shape = (ft.length,)
|
||||
motor_names = (
|
||||
robot_config["names"][key] if robot_config else [f"motor_{i}" for i in range(ft.length)]
|
||||
)
|
||||
assert len(motor_names) == shape[0]
|
||||
names = {"motors": motor_names}
|
||||
elif isinstance(ft, datasets.Image):
|
||||
dtype = "image"
|
||||
image = dataset[0][key] # Assuming first row
|
||||
channels = get_image_pixel_channels(image)
|
||||
shape = (image.height, image.width, channels)
|
||||
names = ["height", "width", "channels"]
|
||||
elif ft._type == "VideoFrame":
|
||||
dtype = "video"
|
||||
shape = None # Add shape later
|
||||
names = ["height", "width", "channels"]
|
||||
|
||||
features[key] = {
|
||||
"dtype": dtype,
|
||||
"shape": shape,
|
||||
"names": names,
|
||||
}
|
||||
|
||||
return features
|
||||
|
||||
|
||||
def add_task_index_by_episodes(dataset: Dataset, tasks_by_episodes: dict) -> tuple[Dataset, list[str]]:
|
||||
df = dataset.to_pandas()
|
||||
tasks = list(set(tasks_by_episodes.values()))
|
||||
tasks_to_task_index = {task: task_idx for task_idx, task in enumerate(tasks)}
|
||||
episodes_to_task_index = {ep_idx: tasks_to_task_index[task] for ep_idx, task in tasks_by_episodes.items()}
|
||||
df["task_index"] = df["episode_index"].map(episodes_to_task_index).astype(int)
|
||||
|
||||
features = dataset.features
|
||||
features["task_index"] = datasets.Value(dtype="int64")
|
||||
dataset = Dataset.from_pandas(df, features=features, split="train")
|
||||
return dataset, tasks
|
||||
|
||||
|
||||
def add_task_index_from_tasks_col(
|
||||
dataset: Dataset, tasks_col: str
|
||||
) -> tuple[Dataset, dict[str, list[str]], list[str]]:
|
||||
df = dataset.to_pandas()
|
||||
|
||||
# HACK: This is to clean some of the instructions in our version of Open X datasets
|
||||
prefix_to_clean = "tf.Tensor(b'"
|
||||
suffix_to_clean = "', shape=(), dtype=string)"
|
||||
df[tasks_col] = df[tasks_col].str.removeprefix(prefix_to_clean).str.removesuffix(suffix_to_clean)
|
||||
|
||||
# Create task_index col
|
||||
tasks_by_episode = df.groupby("episode_index")[tasks_col].unique().apply(lambda x: x.tolist()).to_dict()
|
||||
tasks = df[tasks_col].unique().tolist()
|
||||
tasks_to_task_index = {task: idx for idx, task in enumerate(tasks)}
|
||||
df["task_index"] = df[tasks_col].map(tasks_to_task_index).astype(int)
|
||||
|
||||
# Build the dataset back from df
|
||||
features = dataset.features
|
||||
features["task_index"] = datasets.Value(dtype="int64")
|
||||
dataset = Dataset.from_pandas(df, features=features, split="train")
|
||||
dataset = dataset.remove_columns(tasks_col)
|
||||
|
||||
return dataset, tasks, tasks_by_episode
|
||||
|
||||
|
||||
def split_parquet_by_episodes(
|
||||
dataset: Dataset,
|
||||
total_episodes: int,
|
||||
total_chunks: int,
|
||||
output_dir: Path,
|
||||
) -> list:
|
||||
table = dataset.data.table
|
||||
episode_lengths = []
|
||||
for ep_chunk in range(total_chunks):
|
||||
ep_chunk_start = DEFAULT_CHUNK_SIZE * ep_chunk
|
||||
ep_chunk_end = min(DEFAULT_CHUNK_SIZE * (ep_chunk + 1), total_episodes)
|
||||
chunk_dir = "/".join(DEFAULT_PARQUET_PATH.split("/")[:-1]).format(episode_chunk=ep_chunk)
|
||||
(output_dir / chunk_dir).mkdir(parents=True, exist_ok=True)
|
||||
for ep_idx in range(ep_chunk_start, ep_chunk_end):
|
||||
ep_table = table.filter(pc.equal(table["episode_index"], ep_idx))
|
||||
episode_lengths.insert(ep_idx, len(ep_table))
|
||||
output_file = output_dir / DEFAULT_PARQUET_PATH.format(
|
||||
episode_chunk=ep_chunk, episode_index=ep_idx
|
||||
)
|
||||
pq.write_table(ep_table, output_file)
|
||||
|
||||
return episode_lengths
|
||||
|
||||
|
||||
def move_videos(
|
||||
repo_id: str,
|
||||
video_keys: list[str],
|
||||
total_episodes: int,
|
||||
total_chunks: int,
|
||||
work_dir: Path,
|
||||
clean_gittatributes: Path,
|
||||
branch: str = "main",
|
||||
) -> None:
|
||||
"""
|
||||
HACK: Since HfApi() doesn't provide a way to move files directly in a repo, this function will run git
|
||||
commands to fetch git lfs video files references to move them into subdirectories without having to
|
||||
actually download them.
|
||||
"""
|
||||
_lfs_clone(repo_id, work_dir, branch)
|
||||
|
||||
videos_moved = False
|
||||
video_files = [str(f.relative_to(work_dir)) for f in work_dir.glob("videos*/*.mp4")]
|
||||
if len(video_files) == 0:
|
||||
video_files = [str(f.relative_to(work_dir)) for f in work_dir.glob("videos*/*/*/*.mp4")]
|
||||
videos_moved = True # Videos have already been moved
|
||||
|
||||
assert len(video_files) == total_episodes * len(video_keys)
|
||||
|
||||
lfs_untracked_videos = _get_lfs_untracked_videos(work_dir, video_files)
|
||||
|
||||
current_gittatributes = work_dir / ".gitattributes"
|
||||
if not filecmp.cmp(current_gittatributes, clean_gittatributes, shallow=False):
|
||||
fix_gitattributes(work_dir, current_gittatributes, clean_gittatributes)
|
||||
|
||||
if lfs_untracked_videos:
|
||||
fix_lfs_video_files_tracking(work_dir, video_files)
|
||||
|
||||
if videos_moved:
|
||||
return
|
||||
|
||||
video_dirs = sorted(work_dir.glob("videos*/"))
|
||||
for ep_chunk in range(total_chunks):
|
||||
ep_chunk_start = DEFAULT_CHUNK_SIZE * ep_chunk
|
||||
ep_chunk_end = min(DEFAULT_CHUNK_SIZE * (ep_chunk + 1), total_episodes)
|
||||
for vid_key in video_keys:
|
||||
chunk_dir = "/".join(DEFAULT_VIDEO_PATH.split("/")[:-1]).format(
|
||||
episode_chunk=ep_chunk, video_key=vid_key
|
||||
)
|
||||
(work_dir / chunk_dir).mkdir(parents=True, exist_ok=True)
|
||||
|
||||
for ep_idx in range(ep_chunk_start, ep_chunk_end):
|
||||
target_path = DEFAULT_VIDEO_PATH.format(
|
||||
episode_chunk=ep_chunk, video_key=vid_key, episode_index=ep_idx
|
||||
)
|
||||
video_file = V1_VIDEO_FILE.format(video_key=vid_key, episode_index=ep_idx)
|
||||
if len(video_dirs) == 1:
|
||||
video_path = video_dirs[0] / video_file
|
||||
else:
|
||||
for dir in video_dirs:
|
||||
if (dir / video_file).is_file():
|
||||
video_path = dir / video_file
|
||||
break
|
||||
|
||||
video_path.rename(work_dir / target_path)
|
||||
|
||||
commit_message = "Move video files into chunk subdirectories"
|
||||
subprocess.run(["git", "add", "."], cwd=work_dir, check=True)
|
||||
subprocess.run(["git", "commit", "-m", commit_message], cwd=work_dir, check=True)
|
||||
subprocess.run(["git", "push"], cwd=work_dir, check=True)
|
||||
|
||||
|
||||
def fix_lfs_video_files_tracking(work_dir: Path, lfs_untracked_videos: list[str]) -> None:
|
||||
"""
|
||||
HACK: This function fixes the tracking by git lfs which was not properly set on some repos. In that case,
|
||||
there's no other option than to download the actual files and reupload them with lfs tracking.
|
||||
"""
|
||||
for i in range(0, len(lfs_untracked_videos), 100):
|
||||
files = lfs_untracked_videos[i : i + 100]
|
||||
try:
|
||||
subprocess.run(["git", "rm", "--cached", *files], cwd=work_dir, capture_output=True, check=True)
|
||||
except subprocess.CalledProcessError as e:
|
||||
print("git rm --cached ERROR:")
|
||||
print(e.stderr)
|
||||
subprocess.run(["git", "add", *files], cwd=work_dir, check=True)
|
||||
|
||||
commit_message = "Track video files with git lfs"
|
||||
subprocess.run(["git", "commit", "-m", commit_message], cwd=work_dir, check=True)
|
||||
subprocess.run(["git", "push"], cwd=work_dir, check=True)
|
||||
|
||||
|
||||
def fix_gitattributes(work_dir: Path, current_gittatributes: Path, clean_gittatributes: Path) -> None:
|
||||
shutil.copyfile(clean_gittatributes, current_gittatributes)
|
||||
subprocess.run(["git", "add", ".gitattributes"], cwd=work_dir, check=True)
|
||||
subprocess.run(["git", "commit", "-m", "Fix .gitattributes"], cwd=work_dir, check=True)
|
||||
subprocess.run(["git", "push"], cwd=work_dir, check=True)
|
||||
|
||||
|
||||
def _lfs_clone(repo_id: str, work_dir: Path, branch: str) -> None:
|
||||
subprocess.run(["git", "lfs", "install"], cwd=work_dir, check=True)
|
||||
repo_url = f"https://huggingface.co/datasets/{repo_id}"
|
||||
env = {"GIT_LFS_SKIP_SMUDGE": "1"} # Prevent downloading LFS files
|
||||
subprocess.run(
|
||||
["git", "clone", "--branch", branch, "--single-branch", "--depth", "1", repo_url, str(work_dir)],
|
||||
check=True,
|
||||
env=env,
|
||||
)
|
||||
|
||||
|
||||
def _get_lfs_untracked_videos(work_dir: Path, video_files: list[str]) -> list[str]:
|
||||
lfs_tracked_files = subprocess.run(
|
||||
["git", "lfs", "ls-files", "-n"], cwd=work_dir, capture_output=True, text=True, check=True
|
||||
)
|
||||
lfs_tracked_files = set(lfs_tracked_files.stdout.splitlines())
|
||||
return [f for f in video_files if f not in lfs_tracked_files]
|
||||
|
||||
|
||||
def get_videos_info(repo_id: str, local_dir: Path, video_keys: list[str], branch: str) -> dict:
|
||||
# Assumes first episode
|
||||
video_files = [
|
||||
DEFAULT_VIDEO_PATH.format(episode_chunk=0, video_key=vid_key, episode_index=0)
|
||||
for vid_key in video_keys
|
||||
]
|
||||
hub_api = HfApi()
|
||||
hub_api.snapshot_download(
|
||||
repo_id=repo_id, repo_type="dataset", local_dir=local_dir, revision=branch, allow_patterns=video_files
|
||||
)
|
||||
videos_info_dict = {}
|
||||
for vid_key, vid_path in zip(video_keys, video_files, strict=True):
|
||||
videos_info_dict[vid_key] = get_video_info(local_dir / vid_path)
|
||||
|
||||
return videos_info_dict
|
||||
|
||||
|
||||
def convert_dataset(
|
||||
repo_id: str,
|
||||
local_dir: Path,
|
||||
single_task: str | None = None,
|
||||
tasks_path: Path | None = None,
|
||||
tasks_col: Path | None = None,
|
||||
robot_config: RobotConfig | None = None,
|
||||
test_branch: str | None = None,
|
||||
**card_kwargs,
|
||||
):
|
||||
v1 = get_safe_version(repo_id, V16)
|
||||
v1x_dir = local_dir / V16 / repo_id
|
||||
v20_dir = local_dir / V20 / repo_id
|
||||
v1x_dir.mkdir(parents=True, exist_ok=True)
|
||||
v20_dir.mkdir(parents=True, exist_ok=True)
|
||||
|
||||
hub_api = HfApi()
|
||||
hub_api.snapshot_download(
|
||||
repo_id=repo_id, repo_type="dataset", revision=v1, local_dir=v1x_dir, ignore_patterns="videos*/"
|
||||
)
|
||||
branch = "main"
|
||||
if test_branch:
|
||||
branch = test_branch
|
||||
create_branch(repo_id=repo_id, branch=test_branch, repo_type="dataset")
|
||||
|
||||
metadata_v1 = load_json(v1x_dir / V1_INFO_PATH)
|
||||
dataset = datasets.load_dataset("parquet", data_dir=v1x_dir / "data", split="train")
|
||||
features = get_features_from_hf_dataset(dataset, robot_config)
|
||||
video_keys = [key for key, ft in features.items() if ft["dtype"] == "video"]
|
||||
|
||||
if single_task and "language_instruction" in dataset.column_names:
|
||||
logging.warning(
|
||||
"'single_task' provided but 'language_instruction' tasks_col found. Using 'language_instruction'.",
|
||||
)
|
||||
single_task = None
|
||||
tasks_col = "language_instruction"
|
||||
|
||||
# Episodes & chunks
|
||||
episode_indices = sorted(dataset.unique("episode_index"))
|
||||
total_episodes = len(episode_indices)
|
||||
assert episode_indices == list(range(total_episodes))
|
||||
total_videos = total_episodes * len(video_keys)
|
||||
total_chunks = total_episodes // DEFAULT_CHUNK_SIZE
|
||||
if total_episodes % DEFAULT_CHUNK_SIZE != 0:
|
||||
total_chunks += 1
|
||||
|
||||
# Tasks
|
||||
if single_task:
|
||||
tasks_by_episodes = dict.fromkeys(episode_indices, single_task)
|
||||
dataset, tasks = add_task_index_by_episodes(dataset, tasks_by_episodes)
|
||||
tasks_by_episodes = {ep_idx: [task] for ep_idx, task in tasks_by_episodes.items()}
|
||||
elif tasks_path:
|
||||
tasks_by_episodes = load_json(tasks_path)
|
||||
tasks_by_episodes = {int(ep_idx): task for ep_idx, task in tasks_by_episodes.items()}
|
||||
dataset, tasks = add_task_index_by_episodes(dataset, tasks_by_episodes)
|
||||
tasks_by_episodes = {ep_idx: [task] for ep_idx, task in tasks_by_episodes.items()}
|
||||
elif tasks_col:
|
||||
dataset, tasks, tasks_by_episodes = add_task_index_from_tasks_col(dataset, tasks_col)
|
||||
else:
|
||||
raise ValueError
|
||||
|
||||
assert set(tasks) == {task for ep_tasks in tasks_by_episodes.values() for task in ep_tasks}
|
||||
tasks = [{"task_index": task_idx, "task": task} for task_idx, task in enumerate(tasks)]
|
||||
write_jsonlines(tasks, v20_dir / TASKS_PATH)
|
||||
features["task_index"] = {
|
||||
"dtype": "int64",
|
||||
"shape": (1,),
|
||||
"names": None,
|
||||
}
|
||||
|
||||
# Videos
|
||||
if video_keys:
|
||||
assert metadata_v1.get("video", False)
|
||||
dataset = dataset.remove_columns(video_keys)
|
||||
clean_gitattr = Path(
|
||||
hub_api.hf_hub_download(
|
||||
repo_id=GITATTRIBUTES_REF, repo_type="dataset", local_dir=local_dir, filename=".gitattributes"
|
||||
)
|
||||
).absolute()
|
||||
with tempfile.TemporaryDirectory() as tmp_video_dir:
|
||||
move_videos(
|
||||
repo_id, video_keys, total_episodes, total_chunks, Path(tmp_video_dir), clean_gitattr, branch
|
||||
)
|
||||
videos_info = get_videos_info(repo_id, v1x_dir, video_keys=video_keys, branch=branch)
|
||||
for key in video_keys:
|
||||
features[key]["shape"] = (
|
||||
videos_info[key].pop("video.height"),
|
||||
videos_info[key].pop("video.width"),
|
||||
videos_info[key].pop("video.channels"),
|
||||
)
|
||||
features[key]["video_info"] = videos_info[key]
|
||||
assert math.isclose(videos_info[key]["video.fps"], metadata_v1["fps"], rel_tol=1e-3)
|
||||
if "encoding" in metadata_v1:
|
||||
assert videos_info[key]["video.pix_fmt"] == metadata_v1["encoding"]["pix_fmt"]
|
||||
else:
|
||||
assert metadata_v1.get("video", 0) == 0
|
||||
videos_info = None
|
||||
|
||||
# Split data into 1 parquet file by episode
|
||||
episode_lengths = split_parquet_by_episodes(dataset, total_episodes, total_chunks, v20_dir)
|
||||
|
||||
if robot_config is not None:
|
||||
robot_type = robot_config.type
|
||||
repo_tags = [robot_type]
|
||||
else:
|
||||
robot_type = "unknown"
|
||||
repo_tags = None
|
||||
|
||||
# Episodes
|
||||
episodes = [
|
||||
{"episode_index": ep_idx, "tasks": tasks_by_episodes[ep_idx], "length": episode_lengths[ep_idx]}
|
||||
for ep_idx in episode_indices
|
||||
]
|
||||
write_jsonlines(episodes, v20_dir / EPISODES_PATH)
|
||||
|
||||
# Assemble metadata v2.0
|
||||
metadata_v2_0 = {
|
||||
"codebase_version": V20,
|
||||
"robot_type": robot_type,
|
||||
"total_episodes": total_episodes,
|
||||
"total_frames": len(dataset),
|
||||
"total_tasks": len(tasks),
|
||||
"total_videos": total_videos,
|
||||
"total_chunks": total_chunks,
|
||||
"chunks_size": DEFAULT_CHUNK_SIZE,
|
||||
"fps": metadata_v1["fps"],
|
||||
"splits": {"train": f"0:{total_episodes}"},
|
||||
"data_path": DEFAULT_PARQUET_PATH,
|
||||
"video_path": DEFAULT_VIDEO_PATH if video_keys else None,
|
||||
"features": features,
|
||||
}
|
||||
write_json(metadata_v2_0, v20_dir / INFO_PATH)
|
||||
convert_stats_to_json(v1x_dir, v20_dir)
|
||||
card = create_lerobot_dataset_card(tags=repo_tags, dataset_info=metadata_v2_0, **card_kwargs)
|
||||
|
||||
with contextlib.suppress(EntryNotFoundError, HfHubHTTPError):
|
||||
hub_api.delete_folder(repo_id=repo_id, path_in_repo="data", repo_type="dataset", revision=branch)
|
||||
|
||||
with contextlib.suppress(EntryNotFoundError, HfHubHTTPError):
|
||||
hub_api.delete_folder(repo_id=repo_id, path_in_repo="meta_data", repo_type="dataset", revision=branch)
|
||||
|
||||
with contextlib.suppress(EntryNotFoundError, HfHubHTTPError):
|
||||
hub_api.delete_folder(repo_id=repo_id, path_in_repo="meta", repo_type="dataset", revision=branch)
|
||||
|
||||
hub_api.upload_folder(
|
||||
repo_id=repo_id,
|
||||
path_in_repo="data",
|
||||
folder_path=v20_dir / "data",
|
||||
repo_type="dataset",
|
||||
revision=branch,
|
||||
)
|
||||
hub_api.upload_folder(
|
||||
repo_id=repo_id,
|
||||
path_in_repo="meta",
|
||||
folder_path=v20_dir / "meta",
|
||||
repo_type="dataset",
|
||||
revision=branch,
|
||||
)
|
||||
|
||||
card.push_to_hub(repo_id=repo_id, repo_type="dataset", revision=branch)
|
||||
|
||||
if not test_branch:
|
||||
create_branch(repo_id=repo_id, branch=V20, repo_type="dataset")
|
||||
|
||||
|
||||
def make_robot_config(robot_type: str, **kwargs) -> RobotConfig:
|
||||
if robot_type == "aloha":
|
||||
raise NotImplementedError # TODO
|
||||
|
||||
elif robot_type == "koch_follower":
|
||||
from lerobot.robots.koch_follower import KochFollowerConfig
|
||||
|
||||
return KochFollowerConfig(**kwargs)
|
||||
elif robot_type == "so100_follower":
|
||||
from lerobot.robots.so100_follower import SO100FollowerConfig
|
||||
|
||||
return SO100FollowerConfig(**kwargs)
|
||||
elif robot_type == "stretch":
|
||||
from lerobot.robots.stretch3 import Stretch3RobotConfig
|
||||
|
||||
return Stretch3RobotConfig(**kwargs)
|
||||
elif robot_type == "lekiwi":
|
||||
from lerobot.robots.lekiwi import LeKiwiConfig
|
||||
|
||||
return LeKiwiConfig(**kwargs)
|
||||
else:
|
||||
raise ValueError(f"Robot type '{robot_type}' is not available.")
|
||||
|
||||
|
||||
def main():
|
||||
parser = argparse.ArgumentParser()
|
||||
task_args = parser.add_mutually_exclusive_group(required=True)
|
||||
|
||||
parser.add_argument(
|
||||
"--repo-id",
|
||||
type=str,
|
||||
required=True,
|
||||
help="Repository identifier on Hugging Face: a community or a user name `/` the name of the dataset (e.g. `lerobot/pusht`, `cadene/aloha_sim_insertion_human`).",
|
||||
)
|
||||
task_args.add_argument(
|
||||
"--single-task",
|
||||
type=str,
|
||||
help="A short but accurate description of the single task performed in the dataset.",
|
||||
)
|
||||
task_args.add_argument(
|
||||
"--tasks-col",
|
||||
type=str,
|
||||
help="The name of the column containing language instructions",
|
||||
)
|
||||
task_args.add_argument(
|
||||
"--tasks-path",
|
||||
type=Path,
|
||||
help="The path to a .json file containing one language instruction for each episode_index",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--robot",
|
||||
type=str,
|
||||
default=None,
|
||||
help="Robot config used for the dataset during conversion (e.g. 'koch', 'aloha', 'so100', etc.)",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--local-dir",
|
||||
type=Path,
|
||||
default=None,
|
||||
help="Local directory to store the dataset during conversion. Defaults to /tmp/lerobot_dataset_v2",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--license",
|
||||
type=str,
|
||||
default="apache-2.0",
|
||||
help="Repo license. Must be one of https://huggingface.co/docs/hub/repositories-licenses. Defaults to mit.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--test-branch",
|
||||
type=str,
|
||||
default=None,
|
||||
help="Repo branch to test your conversion first (e.g. 'v2.0.test')",
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
if not args.local_dir:
|
||||
args.local_dir = Path("/tmp/lerobot_dataset_v2")
|
||||
|
||||
if args.robot is not None:
|
||||
robot_config = make_robot_config(args.robot)
|
||||
|
||||
del args.robot
|
||||
|
||||
convert_dataset(**vars(args), robot_config=robot_config)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
main()
|
||||
@@ -1,87 +0,0 @@
|
||||
# Copyright 2024 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import logging
|
||||
import traceback
|
||||
from pathlib import Path
|
||||
|
||||
from datasets import get_dataset_config_info
|
||||
from huggingface_hub import HfApi
|
||||
|
||||
from lerobot import available_datasets
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDatasetMetadata
|
||||
from lerobot.datasets.utils import INFO_PATH, write_info
|
||||
from lerobot.datasets.v21.convert_dataset_v20_to_v21 import V20, SuppressWarnings
|
||||
|
||||
LOCAL_DIR = Path("data/")
|
||||
|
||||
hub_api = HfApi()
|
||||
|
||||
|
||||
def fix_dataset(repo_id: str) -> str:
|
||||
if not hub_api.revision_exists(repo_id, V20, repo_type="dataset"):
|
||||
return f"{repo_id}: skipped (not in {V20})."
|
||||
|
||||
dataset_info = get_dataset_config_info(repo_id, "default")
|
||||
with SuppressWarnings():
|
||||
lerobot_metadata = LeRobotDatasetMetadata(repo_id, revision=V20, force_cache_sync=True)
|
||||
|
||||
meta_features = {key for key, ft in lerobot_metadata.features.items() if ft["dtype"] != "video"}
|
||||
parquet_features = set(dataset_info.features)
|
||||
|
||||
diff_parquet_meta = parquet_features - meta_features
|
||||
diff_meta_parquet = meta_features - parquet_features
|
||||
|
||||
if diff_parquet_meta:
|
||||
raise ValueError(f"In parquet not in info.json: {parquet_features - meta_features}")
|
||||
|
||||
if not diff_meta_parquet:
|
||||
return f"{repo_id}: skipped (no diff)"
|
||||
|
||||
if diff_meta_parquet:
|
||||
logging.warning(f"In info.json not in parquet: {meta_features - parquet_features}")
|
||||
assert diff_meta_parquet == {"language_instruction"}
|
||||
lerobot_metadata.features.pop("language_instruction")
|
||||
write_info(lerobot_metadata.info, lerobot_metadata.root)
|
||||
commit_info = hub_api.upload_file(
|
||||
path_or_fileobj=lerobot_metadata.root / INFO_PATH,
|
||||
path_in_repo=INFO_PATH,
|
||||
repo_id=repo_id,
|
||||
repo_type="dataset",
|
||||
revision=V20,
|
||||
commit_message="Remove 'language_instruction'",
|
||||
create_pr=True,
|
||||
)
|
||||
return f"{repo_id}: success - PR: {commit_info.pr_url}"
|
||||
|
||||
|
||||
def batch_fix():
|
||||
status = {}
|
||||
LOCAL_DIR.mkdir(parents=True, exist_ok=True)
|
||||
logfile = LOCAL_DIR / "fix_features_v20.txt"
|
||||
for num, repo_id in enumerate(available_datasets):
|
||||
print(f"\nConverting {repo_id} ({num}/{len(available_datasets)})")
|
||||
print("---------------------------------------------------------")
|
||||
try:
|
||||
status = fix_dataset(repo_id)
|
||||
except Exception:
|
||||
status = f"{repo_id}: failed\n {traceback.format_exc()}"
|
||||
|
||||
logging.info(status)
|
||||
with open(logfile, "a") as file:
|
||||
file.write(status + "\n")
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
batch_fix()
|
||||
@@ -1,54 +0,0 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2024 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
"""
|
||||
This script is for internal use to convert all datasets under the 'lerobot' hub user account to v2.1.
|
||||
"""
|
||||
|
||||
import traceback
|
||||
from pathlib import Path
|
||||
|
||||
from huggingface_hub import HfApi
|
||||
|
||||
from lerobot import available_datasets
|
||||
from lerobot.datasets.v21.convert_dataset_v20_to_v21 import V21, convert_dataset
|
||||
|
||||
LOCAL_DIR = Path("data/")
|
||||
|
||||
|
||||
def batch_convert():
|
||||
status = {}
|
||||
LOCAL_DIR.mkdir(parents=True, exist_ok=True)
|
||||
logfile = LOCAL_DIR / "conversion_log_v21.txt"
|
||||
hub_api = HfApi()
|
||||
for num, repo_id in enumerate(available_datasets):
|
||||
print(f"\nConverting {repo_id} ({num}/{len(available_datasets)})")
|
||||
print("---------------------------------------------------------")
|
||||
try:
|
||||
if hub_api.revision_exists(repo_id, V21, repo_type="dataset"):
|
||||
status = f"{repo_id}: success (already in {V21})."
|
||||
else:
|
||||
convert_dataset(repo_id)
|
||||
status = f"{repo_id}: success."
|
||||
except Exception:
|
||||
status = f"{repo_id}: failed\n {traceback.format_exc()}"
|
||||
|
||||
with open(logfile, "a") as file:
|
||||
file.write(status + "\n")
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
batch_convert()
|
||||
@@ -1,114 +0,0 @@
|
||||
# Copyright 2024 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
"""
|
||||
This script will help you convert any LeRobot dataset already pushed to the hub from codebase version 2.0 to
|
||||
2.1. It will:
|
||||
|
||||
- Generate per-episodes stats and writes them in `episodes_stats.jsonl`
|
||||
- Check consistency between these new stats and the old ones.
|
||||
- Remove the deprecated `stats.json`.
|
||||
- Update codebase_version in `info.json`.
|
||||
- Push this new version to the hub on the 'main' branch and tags it with "v2.1".
|
||||
|
||||
Usage:
|
||||
|
||||
```bash
|
||||
python -m lerobot.datasets.v21.convert_dataset_v20_to_v21 \
|
||||
--repo-id=aliberts/koch_tutorial
|
||||
```
|
||||
|
||||
"""
|
||||
|
||||
import argparse
|
||||
import logging
|
||||
|
||||
from huggingface_hub import HfApi
|
||||
|
||||
from lerobot.datasets.lerobot_dataset import CODEBASE_VERSION, LeRobotDataset
|
||||
from lerobot.datasets.utils import EPISODES_STATS_PATH, STATS_PATH, load_stats, write_info
|
||||
from lerobot.datasets.v21.convert_stats import check_aggregate_stats, convert_stats
|
||||
|
||||
V20 = "v2.0"
|
||||
V21 = "v2.1"
|
||||
|
||||
|
||||
class SuppressWarnings:
|
||||
def __enter__(self):
|
||||
self.previous_level = logging.getLogger().getEffectiveLevel()
|
||||
logging.getLogger().setLevel(logging.ERROR)
|
||||
|
||||
def __exit__(self, exc_type, exc_val, exc_tb):
|
||||
logging.getLogger().setLevel(self.previous_level)
|
||||
|
||||
|
||||
def convert_dataset(
|
||||
repo_id: str,
|
||||
branch: str | None = None,
|
||||
num_workers: int = 4,
|
||||
):
|
||||
with SuppressWarnings():
|
||||
dataset = LeRobotDataset(repo_id, revision=V20, force_cache_sync=True)
|
||||
|
||||
if (dataset.root / EPISODES_STATS_PATH).is_file():
|
||||
(dataset.root / EPISODES_STATS_PATH).unlink()
|
||||
|
||||
convert_stats(dataset, num_workers=num_workers)
|
||||
ref_stats = load_stats(dataset.root)
|
||||
check_aggregate_stats(dataset, ref_stats)
|
||||
|
||||
dataset.meta.info["codebase_version"] = CODEBASE_VERSION
|
||||
write_info(dataset.meta.info, dataset.root)
|
||||
|
||||
dataset.push_to_hub(branch=branch, tag_version=False, allow_patterns="meta/")
|
||||
|
||||
# delete old stats.json file
|
||||
if (dataset.root / STATS_PATH).is_file:
|
||||
(dataset.root / STATS_PATH).unlink()
|
||||
|
||||
hub_api = HfApi()
|
||||
if hub_api.file_exists(
|
||||
repo_id=dataset.repo_id, filename=STATS_PATH, revision=branch, repo_type="dataset"
|
||||
):
|
||||
hub_api.delete_file(
|
||||
path_in_repo=STATS_PATH, repo_id=dataset.repo_id, revision=branch, repo_type="dataset"
|
||||
)
|
||||
|
||||
hub_api.create_tag(repo_id, tag=CODEBASE_VERSION, revision=branch, repo_type="dataset")
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
parser = argparse.ArgumentParser()
|
||||
parser.add_argument(
|
||||
"--repo-id",
|
||||
type=str,
|
||||
required=True,
|
||||
help="Repository identifier on Hugging Face: a community or a user name `/` the name of the dataset "
|
||||
"(e.g. `lerobot/pusht`, `cadene/aloha_sim_insertion_human`).",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--branch",
|
||||
type=str,
|
||||
default=None,
|
||||
help="Repo branch to push your dataset. Defaults to the main branch.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--num-workers",
|
||||
type=int,
|
||||
default=4,
|
||||
help="Number of workers for parallelizing stats compute. Defaults to 4.",
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
convert_dataset(**vars(args))
|
||||
@@ -1,99 +0,0 @@
|
||||
# Copyright 2024 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from concurrent.futures import ThreadPoolExecutor, as_completed
|
||||
|
||||
import numpy as np
|
||||
from tqdm import tqdm
|
||||
|
||||
from lerobot.datasets.compute_stats import aggregate_stats, get_feature_stats, sample_indices
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDataset
|
||||
from lerobot.datasets.utils import write_episode_stats
|
||||
|
||||
|
||||
def sample_episode_video_frames(dataset: LeRobotDataset, episode_index: int, ft_key: str) -> np.ndarray:
|
||||
ep_len = dataset.meta.episodes[episode_index]["length"]
|
||||
sampled_indices = sample_indices(ep_len)
|
||||
query_timestamps = dataset._get_query_timestamps(0.0, {ft_key: sampled_indices})
|
||||
video_frames = dataset._query_videos(query_timestamps, episode_index)
|
||||
return video_frames[ft_key].numpy()
|
||||
|
||||
|
||||
def convert_episode_stats(dataset: LeRobotDataset, ep_idx: int):
|
||||
ep_start_idx = dataset.episode_data_index["from"][ep_idx]
|
||||
ep_end_idx = dataset.episode_data_index["to"][ep_idx]
|
||||
ep_data = dataset.hf_dataset.select(range(ep_start_idx, ep_end_idx))
|
||||
|
||||
ep_stats = {}
|
||||
for key, ft in dataset.features.items():
|
||||
if ft["dtype"] == "video":
|
||||
# We sample only for videos
|
||||
ep_ft_data = sample_episode_video_frames(dataset, ep_idx, key)
|
||||
else:
|
||||
ep_ft_data = np.array(ep_data[key])
|
||||
|
||||
axes_to_reduce = (0, 2, 3) if ft["dtype"] in ["image", "video"] else 0
|
||||
keepdims = True if ft["dtype"] in ["image", "video"] else ep_ft_data.ndim == 1
|
||||
ep_stats[key] = get_feature_stats(ep_ft_data, axis=axes_to_reduce, keepdims=keepdims)
|
||||
|
||||
if ft["dtype"] in ["image", "video"]: # remove batch dim
|
||||
ep_stats[key] = {
|
||||
k: v if k == "count" else np.squeeze(v, axis=0) for k, v in ep_stats[key].items()
|
||||
}
|
||||
|
||||
dataset.meta.episodes_stats[ep_idx] = ep_stats
|
||||
|
||||
|
||||
def convert_stats(dataset: LeRobotDataset, num_workers: int = 0):
|
||||
assert dataset.episodes is None
|
||||
print("Computing episodes stats")
|
||||
total_episodes = dataset.meta.total_episodes
|
||||
if num_workers > 0:
|
||||
with ThreadPoolExecutor(max_workers=num_workers) as executor:
|
||||
futures = {
|
||||
executor.submit(convert_episode_stats, dataset, ep_idx): ep_idx
|
||||
for ep_idx in range(total_episodes)
|
||||
}
|
||||
for future in tqdm(as_completed(futures), total=total_episodes):
|
||||
future.result()
|
||||
else:
|
||||
for ep_idx in tqdm(range(total_episodes)):
|
||||
convert_episode_stats(dataset, ep_idx)
|
||||
|
||||
for ep_idx in tqdm(range(total_episodes)):
|
||||
write_episode_stats(ep_idx, dataset.meta.episodes_stats[ep_idx], dataset.root)
|
||||
|
||||
|
||||
def check_aggregate_stats(
|
||||
dataset: LeRobotDataset,
|
||||
reference_stats: dict[str, dict[str, np.ndarray]],
|
||||
video_rtol_atol: tuple[float] = (1e-2, 1e-2),
|
||||
default_rtol_atol: tuple[float] = (5e-6, 6e-5),
|
||||
):
|
||||
"""Verifies that the aggregated stats from episodes_stats are close to reference stats."""
|
||||
agg_stats = aggregate_stats(list(dataset.meta.episodes_stats.values()))
|
||||
for key, ft in dataset.features.items():
|
||||
# These values might need some fine-tuning
|
||||
if ft["dtype"] == "video":
|
||||
# to account for image sub-sampling
|
||||
rtol, atol = video_rtol_atol
|
||||
else:
|
||||
rtol, atol = default_rtol_atol
|
||||
|
||||
for stat, val in agg_stats[key].items():
|
||||
if key in reference_stats and stat in reference_stats[key]:
|
||||
err_msg = f"feature='{key}' stats='{stat}'"
|
||||
np.testing.assert_allclose(
|
||||
val, reference_stats[key][stat], rtol=rtol, atol=atol, err_msg=err_msg
|
||||
)
|
||||
@@ -0,0 +1,500 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
"""
|
||||
This script will help you convert any LeRobot dataset already pushed to the hub from codebase version 2.1 to
|
||||
3.0. It will:
|
||||
|
||||
- Generate per-episodes stats and writes them in `episodes_stats.jsonl`
|
||||
- Check consistency between these new stats and the old ones.
|
||||
- Remove the deprecated `stats.json`.
|
||||
- Update codebase_version in `info.json`.
|
||||
- Push this new version to the hub on the 'main' branch and tags it with "v3.0".
|
||||
|
||||
Usage:
|
||||
|
||||
```bash
|
||||
python src/lerobot/datasets/v30/convert_dataset_v21_to_v30.py \
|
||||
--repo-id=lerobot/pusht
|
||||
```
|
||||
|
||||
"""
|
||||
|
||||
import argparse
|
||||
import shutil
|
||||
from pathlib import Path
|
||||
from typing import Any
|
||||
|
||||
import jsonlines
|
||||
import pandas as pd
|
||||
import pyarrow as pa
|
||||
import tqdm
|
||||
from datasets import Dataset, Features, Image
|
||||
from huggingface_hub import HfApi, snapshot_download
|
||||
from requests import HTTPError
|
||||
|
||||
from lerobot.constants import HF_LEROBOT_HOME
|
||||
from lerobot.datasets.compute_stats import aggregate_stats
|
||||
from lerobot.datasets.lerobot_dataset import CODEBASE_VERSION, LeRobotDataset
|
||||
from lerobot.datasets.utils import (
|
||||
DEFAULT_CHUNK_SIZE,
|
||||
DEFAULT_DATA_FILE_SIZE_IN_MB,
|
||||
DEFAULT_DATA_PATH,
|
||||
DEFAULT_VIDEO_FILE_SIZE_IN_MB,
|
||||
DEFAULT_VIDEO_PATH,
|
||||
LEGACY_EPISODES_PATH,
|
||||
LEGACY_EPISODES_STATS_PATH,
|
||||
LEGACY_TASKS_PATH,
|
||||
cast_stats_to_numpy,
|
||||
flatten_dict,
|
||||
get_parquet_file_size_in_mb,
|
||||
get_parquet_num_frames,
|
||||
get_video_size_in_mb,
|
||||
load_info,
|
||||
update_chunk_file_indices,
|
||||
write_episodes,
|
||||
write_info,
|
||||
write_stats,
|
||||
write_tasks,
|
||||
)
|
||||
from lerobot.datasets.video_utils import concatenate_video_files, get_video_duration_in_s
|
||||
|
||||
V21 = "v2.1"
|
||||
|
||||
|
||||
"""
|
||||
-------------------------
|
||||
OLD
|
||||
data/chunk-000/episode_000000.parquet
|
||||
|
||||
NEW
|
||||
data/chunk-000/file_000.parquet
|
||||
-------------------------
|
||||
OLD
|
||||
videos/chunk-000/CAMERA/episode_000000.mp4
|
||||
|
||||
NEW
|
||||
videos/chunk-000/file_000.mp4
|
||||
-------------------------
|
||||
OLD
|
||||
episodes.jsonl
|
||||
{"episode_index": 1, "tasks": ["Put the blue block in the green bowl"], "length": 266}
|
||||
|
||||
NEW
|
||||
meta/episodes/chunk-000/episodes_000.parquet
|
||||
episode_index | video_chunk_index | video_file_index | data_chunk_index | data_file_index | tasks | length
|
||||
-------------------------
|
||||
OLD
|
||||
tasks.jsonl
|
||||
{"task_index": 1, "task": "Put the blue block in the green bowl"}
|
||||
|
||||
NEW
|
||||
meta/tasks/chunk-000/file_000.parquet
|
||||
task_index | task
|
||||
-------------------------
|
||||
OLD
|
||||
episodes_stats.jsonl
|
||||
|
||||
NEW
|
||||
meta/episodes_stats/chunk-000/file_000.parquet
|
||||
episode_index | mean | std | min | max
|
||||
-------------------------
|
||||
UPDATE
|
||||
meta/info.json
|
||||
-------------------------
|
||||
"""
|
||||
|
||||
|
||||
def load_jsonlines(fpath: Path) -> list[Any]:
|
||||
with jsonlines.open(fpath, "r") as reader:
|
||||
return list(reader)
|
||||
|
||||
|
||||
def legacy_load_episodes(local_dir: Path) -> dict:
|
||||
episodes = load_jsonlines(local_dir / LEGACY_EPISODES_PATH)
|
||||
return {item["episode_index"]: item for item in sorted(episodes, key=lambda x: x["episode_index"])}
|
||||
|
||||
|
||||
def legacy_load_episodes_stats(local_dir: Path) -> dict:
|
||||
episodes_stats = load_jsonlines(local_dir / LEGACY_EPISODES_STATS_PATH)
|
||||
return {
|
||||
item["episode_index"]: cast_stats_to_numpy(item["stats"])
|
||||
for item in sorted(episodes_stats, key=lambda x: x["episode_index"])
|
||||
}
|
||||
|
||||
|
||||
def legacy_load_tasks(local_dir: Path) -> tuple[dict, dict]:
|
||||
tasks = load_jsonlines(local_dir / LEGACY_TASKS_PATH)
|
||||
tasks = {item["task_index"]: item["task"] for item in sorted(tasks, key=lambda x: x["task_index"])}
|
||||
task_to_task_index = {task: task_index for task_index, task in tasks.items()}
|
||||
return tasks, task_to_task_index
|
||||
|
||||
|
||||
def convert_tasks(root, new_root):
|
||||
tasks, _ = legacy_load_tasks(root)
|
||||
task_indices = tasks.keys()
|
||||
task_strings = tasks.values()
|
||||
df_tasks = pd.DataFrame({"task_index": task_indices}, index=task_strings)
|
||||
write_tasks(df_tasks, new_root)
|
||||
|
||||
|
||||
def concat_data_files(paths_to_cat, new_root, chunk_idx, file_idx, image_keys):
|
||||
# TODO(rcadene): to save RAM use Dataset.from_parquet(file) and concatenate_datasets
|
||||
dataframes = [pd.read_parquet(file) for file in paths_to_cat]
|
||||
# Concatenate all DataFrames along rows
|
||||
concatenated_df = pd.concat(dataframes, ignore_index=True)
|
||||
|
||||
path = new_root / DEFAULT_DATA_PATH.format(chunk_index=chunk_idx, file_index=file_idx)
|
||||
path.parent.mkdir(parents=True, exist_ok=True)
|
||||
|
||||
if len(image_keys) > 0:
|
||||
schema = pa.Schema.from_pandas(concatenated_df)
|
||||
features = Features.from_arrow_schema(schema)
|
||||
for key in image_keys:
|
||||
features[key] = Image()
|
||||
schema = features.arrow_schema
|
||||
else:
|
||||
schema = None
|
||||
|
||||
concatenated_df.to_parquet(path, index=False, schema=schema)
|
||||
|
||||
|
||||
def convert_data(root: Path, new_root: Path, data_file_size_in_mb: int):
|
||||
data_dir = root / "data"
|
||||
ep_paths = sorted(data_dir.glob("*/*.parquet"))
|
||||
|
||||
image_keys = get_image_keys(root)
|
||||
|
||||
ep_idx = 0
|
||||
chunk_idx = 0
|
||||
file_idx = 0
|
||||
size_in_mb = 0
|
||||
num_frames = 0
|
||||
paths_to_cat = []
|
||||
episodes_metadata = []
|
||||
for ep_path in ep_paths:
|
||||
ep_size_in_mb = get_parquet_file_size_in_mb(ep_path)
|
||||
ep_num_frames = get_parquet_num_frames(ep_path)
|
||||
ep_metadata = {
|
||||
"episode_index": ep_idx,
|
||||
"data/chunk_index": chunk_idx,
|
||||
"data/file_index": file_idx,
|
||||
"dataset_from_index": num_frames,
|
||||
"dataset_to_index": num_frames + ep_num_frames,
|
||||
}
|
||||
size_in_mb += ep_size_in_mb
|
||||
num_frames += ep_num_frames
|
||||
episodes_metadata.append(ep_metadata)
|
||||
ep_idx += 1
|
||||
|
||||
if size_in_mb < data_file_size_in_mb:
|
||||
paths_to_cat.append(ep_path)
|
||||
continue
|
||||
|
||||
if paths_to_cat:
|
||||
concat_data_files(paths_to_cat, new_root, chunk_idx, file_idx, image_keys)
|
||||
|
||||
# Reset for the next file
|
||||
size_in_mb = ep_size_in_mb
|
||||
num_frames = ep_num_frames
|
||||
paths_to_cat = [ep_path]
|
||||
|
||||
chunk_idx, file_idx = update_chunk_file_indices(chunk_idx, file_idx, DEFAULT_CHUNK_SIZE)
|
||||
|
||||
# Write remaining data if any
|
||||
if paths_to_cat:
|
||||
concat_data_files(paths_to_cat, new_root, chunk_idx, file_idx, image_keys)
|
||||
|
||||
return episodes_metadata
|
||||
|
||||
|
||||
def get_video_keys(root):
|
||||
info = load_info(root)
|
||||
features = info["features"]
|
||||
video_keys = [key for key, ft in features.items() if ft["dtype"] == "video"]
|
||||
return video_keys
|
||||
|
||||
|
||||
def get_image_keys(root):
|
||||
info = load_info(root)
|
||||
features = info["features"]
|
||||
image_keys = [key for key, ft in features.items() if ft["dtype"] == "image"]
|
||||
return image_keys
|
||||
|
||||
|
||||
def convert_videos(root: Path, new_root: Path, video_file_size_in_mb: int):
|
||||
video_keys = get_video_keys(root)
|
||||
if len(video_keys) == 0:
|
||||
return None
|
||||
|
||||
video_keys = sorted(video_keys)
|
||||
|
||||
eps_metadata_per_cam = []
|
||||
for camera in video_keys:
|
||||
eps_metadata = convert_videos_of_camera(root, new_root, camera, video_file_size_in_mb)
|
||||
eps_metadata_per_cam.append(eps_metadata)
|
||||
|
||||
num_eps_per_cam = [len(eps_cam_map) for eps_cam_map in eps_metadata_per_cam]
|
||||
if len(set(num_eps_per_cam)) != 1:
|
||||
raise ValueError(f"All cams dont have same number of episodes ({num_eps_per_cam}).")
|
||||
|
||||
episods_metadata = []
|
||||
num_cameras = len(video_keys)
|
||||
num_episodes = num_eps_per_cam[0]
|
||||
for ep_idx in range(num_episodes):
|
||||
# Sanity check
|
||||
ep_ids = [eps_metadata_per_cam[cam_idx][ep_idx]["episode_index"] for cam_idx in range(num_cameras)]
|
||||
ep_ids += [ep_idx]
|
||||
if len(set(ep_ids)) != 1:
|
||||
raise ValueError(f"All episode indices need to match ({ep_ids}).")
|
||||
|
||||
ep_dict = {}
|
||||
for cam_idx in range(num_cameras):
|
||||
ep_dict.update(eps_metadata_per_cam[cam_idx][ep_idx])
|
||||
episods_metadata.append(ep_dict)
|
||||
|
||||
return episods_metadata
|
||||
|
||||
|
||||
def convert_videos_of_camera(root: Path, new_root: Path, video_key: str, video_file_size_in_mb: int):
|
||||
# Access old paths to mp4
|
||||
videos_dir = root / "videos"
|
||||
ep_paths = sorted(videos_dir.glob(f"*/{video_key}/*.mp4"))
|
||||
|
||||
ep_idx = 0
|
||||
chunk_idx = 0
|
||||
file_idx = 0
|
||||
size_in_mb = 0
|
||||
duration_in_s = 0.0
|
||||
paths_to_cat = []
|
||||
episodes_metadata = []
|
||||
for ep_path in tqdm.tqdm(ep_paths, desc=f"convert videos of {video_key}"):
|
||||
ep_size_in_mb = get_video_size_in_mb(ep_path)
|
||||
ep_duration_in_s = get_video_duration_in_s(ep_path)
|
||||
|
||||
# Check if adding this episode would exceed the limit
|
||||
if size_in_mb + ep_size_in_mb >= video_file_size_in_mb and len(paths_to_cat) > 0:
|
||||
# Size limit would be exceeded, save current accumulation WITHOUT this episode
|
||||
concatenate_video_files(
|
||||
paths_to_cat,
|
||||
new_root
|
||||
/ DEFAULT_VIDEO_PATH.format(video_key=video_key, chunk_index=chunk_idx, file_index=file_idx),
|
||||
)
|
||||
|
||||
# Update episodes metadata for the file we just saved
|
||||
for i, _ in enumerate(paths_to_cat):
|
||||
past_ep_idx = ep_idx - len(paths_to_cat) + i
|
||||
episodes_metadata[past_ep_idx][f"videos/{video_key}/chunk_index"] = chunk_idx
|
||||
episodes_metadata[past_ep_idx][f"videos/{video_key}/file_index"] = file_idx
|
||||
|
||||
# Move to next file and start fresh with current episode
|
||||
chunk_idx, file_idx = update_chunk_file_indices(chunk_idx, file_idx, DEFAULT_CHUNK_SIZE)
|
||||
size_in_mb = 0
|
||||
duration_in_s = 0.0
|
||||
paths_to_cat = []
|
||||
|
||||
# Add current episode metadata
|
||||
ep_metadata = {
|
||||
"episode_index": ep_idx,
|
||||
f"videos/{video_key}/chunk_index": chunk_idx, # Will be updated when file is saved
|
||||
f"videos/{video_key}/file_index": file_idx, # Will be updated when file is saved
|
||||
f"videos/{video_key}/from_timestamp": duration_in_s,
|
||||
f"videos/{video_key}/to_timestamp": duration_in_s + ep_duration_in_s,
|
||||
}
|
||||
episodes_metadata.append(ep_metadata)
|
||||
|
||||
# Add current episode to accumulation
|
||||
paths_to_cat.append(ep_path)
|
||||
size_in_mb += ep_size_in_mb
|
||||
duration_in_s += ep_duration_in_s
|
||||
ep_idx += 1
|
||||
|
||||
# Write remaining videos if any
|
||||
if paths_to_cat:
|
||||
concatenate_video_files(
|
||||
paths_to_cat,
|
||||
new_root
|
||||
/ DEFAULT_VIDEO_PATH.format(video_key=video_key, chunk_index=chunk_idx, file_index=file_idx),
|
||||
)
|
||||
|
||||
# Update episodes metadata for the final file
|
||||
for i, _ in enumerate(paths_to_cat):
|
||||
past_ep_idx = ep_idx - len(paths_to_cat) + i
|
||||
episodes_metadata[past_ep_idx][f"videos/{video_key}/chunk_index"] = chunk_idx
|
||||
episodes_metadata[past_ep_idx][f"videos/{video_key}/file_index"] = file_idx
|
||||
|
||||
return episodes_metadata
|
||||
|
||||
|
||||
def generate_episode_metadata_dict(
|
||||
episodes_legacy_metadata, episodes_metadata, episodes_stats, episodes_videos=None
|
||||
):
|
||||
num_episodes = len(episodes_metadata)
|
||||
episodes_legacy_metadata_vals = list(episodes_legacy_metadata.values())
|
||||
episodes_stats_vals = list(episodes_stats.values())
|
||||
episodes_stats_keys = list(episodes_stats.keys())
|
||||
|
||||
for i in range(num_episodes):
|
||||
ep_legacy_metadata = episodes_legacy_metadata_vals[i]
|
||||
ep_metadata = episodes_metadata[i]
|
||||
ep_stats = episodes_stats_vals[i]
|
||||
|
||||
ep_ids_set = {
|
||||
ep_legacy_metadata["episode_index"],
|
||||
ep_metadata["episode_index"],
|
||||
episodes_stats_keys[i],
|
||||
}
|
||||
|
||||
if episodes_videos is None:
|
||||
ep_video = {}
|
||||
else:
|
||||
ep_video = episodes_videos[i]
|
||||
ep_ids_set.add(ep_video["episode_index"])
|
||||
|
||||
if len(ep_ids_set) != 1:
|
||||
raise ValueError(f"Number of episodes is not the same ({ep_ids_set}).")
|
||||
|
||||
ep_dict = {**ep_metadata, **ep_video, **ep_legacy_metadata, **flatten_dict({"stats": ep_stats})}
|
||||
ep_dict["meta/episodes/chunk_index"] = 0
|
||||
ep_dict["meta/episodes/file_index"] = 0
|
||||
yield ep_dict
|
||||
|
||||
|
||||
def convert_episodes_metadata(root, new_root, episodes_metadata, episodes_video_metadata=None):
|
||||
episodes_legacy_metadata = legacy_load_episodes(root)
|
||||
episodes_stats = legacy_load_episodes_stats(root)
|
||||
|
||||
num_eps_set = {len(episodes_legacy_metadata), len(episodes_metadata)}
|
||||
if episodes_video_metadata is not None:
|
||||
num_eps_set.add(len(episodes_video_metadata))
|
||||
|
||||
if len(num_eps_set) != 1:
|
||||
raise ValueError(f"Number of episodes is not the same ({num_eps_set}).")
|
||||
|
||||
ds_episodes = Dataset.from_generator(
|
||||
lambda: generate_episode_metadata_dict(
|
||||
episodes_legacy_metadata, episodes_metadata, episodes_stats, episodes_video_metadata
|
||||
)
|
||||
)
|
||||
write_episodes(ds_episodes, new_root)
|
||||
|
||||
stats = aggregate_stats(list(episodes_stats.values()))
|
||||
write_stats(stats, new_root)
|
||||
|
||||
|
||||
def convert_info(root, new_root, data_file_size_in_mb, video_file_size_in_mb):
|
||||
info = load_info(root)
|
||||
info["codebase_version"] = "v3.0"
|
||||
del info["total_chunks"]
|
||||
del info["total_videos"]
|
||||
info["data_files_size_in_mb"] = data_file_size_in_mb
|
||||
info["video_files_size_in_mb"] = video_file_size_in_mb
|
||||
info["data_path"] = DEFAULT_DATA_PATH
|
||||
info["video_path"] = DEFAULT_VIDEO_PATH
|
||||
info["fps"] = int(info["fps"])
|
||||
for key in info["features"]:
|
||||
if info["features"][key]["dtype"] == "video":
|
||||
# already has fps in video_info
|
||||
continue
|
||||
info["features"][key]["fps"] = info["fps"]
|
||||
write_info(info, new_root)
|
||||
|
||||
|
||||
def convert_dataset(
|
||||
repo_id: str,
|
||||
branch: str | None = None,
|
||||
data_file_size_in_mb: int | None = None,
|
||||
video_file_size_in_mb: int | None = None,
|
||||
):
|
||||
root = HF_LEROBOT_HOME / repo_id
|
||||
old_root = HF_LEROBOT_HOME / f"{repo_id}_old"
|
||||
new_root = HF_LEROBOT_HOME / f"{repo_id}_v30"
|
||||
|
||||
if data_file_size_in_mb is None:
|
||||
data_file_size_in_mb = DEFAULT_DATA_FILE_SIZE_IN_MB
|
||||
if video_file_size_in_mb is None:
|
||||
video_file_size_in_mb = DEFAULT_VIDEO_FILE_SIZE_IN_MB
|
||||
|
||||
if old_root.is_dir() and root.is_dir():
|
||||
shutil.rmtree(str(root))
|
||||
shutil.move(str(old_root), str(root))
|
||||
|
||||
if new_root.is_dir():
|
||||
shutil.rmtree(new_root)
|
||||
|
||||
snapshot_download(
|
||||
repo_id,
|
||||
repo_type="dataset",
|
||||
revision=V21,
|
||||
local_dir=root,
|
||||
)
|
||||
|
||||
convert_info(root, new_root, data_file_size_in_mb, video_file_size_in_mb)
|
||||
convert_tasks(root, new_root)
|
||||
episodes_metadata = convert_data(root, new_root, data_file_size_in_mb)
|
||||
episodes_videos_metadata = convert_videos(root, new_root, video_file_size_in_mb)
|
||||
convert_episodes_metadata(root, new_root, episodes_metadata, episodes_videos_metadata)
|
||||
|
||||
shutil.move(str(root), str(old_root))
|
||||
shutil.move(str(new_root), str(root))
|
||||
|
||||
hub_api = HfApi()
|
||||
try:
|
||||
hub_api.delete_tag(repo_id, tag=CODEBASE_VERSION, repo_type="dataset")
|
||||
except HTTPError as e:
|
||||
print(f"tag={CODEBASE_VERSION} probably doesn't exist. Skipping exception ({e})")
|
||||
pass
|
||||
hub_api.delete_files(
|
||||
delete_patterns=["data/chunk*/episode_*", "meta/*.jsonl", "videos/chunk*"],
|
||||
repo_id=repo_id,
|
||||
revision=branch,
|
||||
repo_type="dataset",
|
||||
)
|
||||
hub_api.create_tag(repo_id, tag=CODEBASE_VERSION, revision=branch, repo_type="dataset")
|
||||
|
||||
LeRobotDataset(repo_id).push_to_hub()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
parser = argparse.ArgumentParser()
|
||||
parser.add_argument(
|
||||
"--repo-id",
|
||||
type=str,
|
||||
required=True,
|
||||
help="Repository identifier on Hugging Face: a community or a user name `/` the name of the dataset "
|
||||
"(e.g. `lerobot/pusht`, `cadene/aloha_sim_insertion_human`).",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--branch",
|
||||
type=str,
|
||||
default=None,
|
||||
help="Repo branch to push your dataset. Defaults to the main branch.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--data-file-size-in-mb",
|
||||
type=int,
|
||||
default=None,
|
||||
help="File size in MB. Defaults to 100 for data and 500 for videos.",
|
||||
)
|
||||
parser.add_argument(
|
||||
"--video-file-size-in-mb",
|
||||
type=int,
|
||||
default=None,
|
||||
help="File size in MB. Defaults to 100 for data and 500 for videos.",
|
||||
)
|
||||
|
||||
args = parser.parse_args()
|
||||
convert_dataset(**vars(args))
|
||||
@@ -17,12 +17,15 @@ import glob
|
||||
import importlib
|
||||
import logging
|
||||
import shutil
|
||||
import tempfile
|
||||
import warnings
|
||||
from dataclasses import dataclass, field
|
||||
from pathlib import Path
|
||||
from threading import Lock
|
||||
from typing import Any, ClassVar
|
||||
|
||||
import av
|
||||
import fsspec
|
||||
import pyarrow as pa
|
||||
import torch
|
||||
import torchvision
|
||||
@@ -168,15 +171,68 @@ def decode_video_frames_torchvision(
|
||||
return closest_frames
|
||||
|
||||
|
||||
class VideoDecoderCache:
|
||||
"""Thread-safe cache for video decoders to avoid expensive re-initialization."""
|
||||
|
||||
def __init__(self):
|
||||
self._cache: dict[str, tuple[Any, Any]] = {}
|
||||
self._lock = Lock()
|
||||
|
||||
def get_decoder(self, video_path: str):
|
||||
"""Get a cached decoder or create a new one."""
|
||||
if importlib.util.find_spec("torchcodec"):
|
||||
from torchcodec.decoders import VideoDecoder
|
||||
else:
|
||||
raise ImportError("torchcodec is required but not available.")
|
||||
|
||||
video_path = str(video_path)
|
||||
|
||||
with self._lock:
|
||||
if video_path not in self._cache:
|
||||
file_handle = fsspec.open(video_path).__enter__()
|
||||
decoder = VideoDecoder(file_handle, seek_mode="approximate")
|
||||
self._cache[video_path] = (decoder, file_handle)
|
||||
|
||||
return self._cache[video_path][0]
|
||||
|
||||
def clear(self):
|
||||
"""Clear the cache and close file handles."""
|
||||
with self._lock:
|
||||
for _, file_handle in self._cache.values():
|
||||
file_handle.close()
|
||||
self._cache.clear()
|
||||
|
||||
def size(self) -> int:
|
||||
"""Return the number of cached decoders."""
|
||||
with self._lock:
|
||||
return len(self._cache)
|
||||
|
||||
|
||||
class FrameTimestampError(ValueError):
|
||||
"""Helper error to indicate the retrieved timestamps exceed the queried ones"""
|
||||
|
||||
pass
|
||||
|
||||
|
||||
_default_decoder_cache = VideoDecoderCache()
|
||||
|
||||
|
||||
def decode_video_frames_torchcodec(
|
||||
video_path: Path | str,
|
||||
timestamps: list[float],
|
||||
tolerance_s: float,
|
||||
device: str = "cpu",
|
||||
log_loaded_timestamps: bool = False,
|
||||
decoder_cache: VideoDecoderCache | None = None,
|
||||
) -> torch.Tensor:
|
||||
"""Loads frames associated with the requested timestamps of a video using torchcodec.
|
||||
|
||||
Args:
|
||||
video_path: Path to the video file.
|
||||
timestamps: List of timestamps to extract frames.
|
||||
tolerance_s: Allowed deviation in seconds for frame retrieval.
|
||||
log_loaded_timestamps: Whether to log loaded timestamps.
|
||||
decoder_cache: Optional decoder cache instance. Uses default if None.
|
||||
|
||||
Note: Setting device="cuda" outside the main process, e.g. in data loader workers, will lead to CUDA initialization errors.
|
||||
|
||||
Note: Video benefits from inter-frame compression. Instead of storing every frame individually,
|
||||
@@ -185,27 +241,24 @@ def decode_video_frames_torchcodec(
|
||||
and all subsequent frames until reaching the requested frame. The number of key frames in a video
|
||||
can be adjusted during encoding to take into account decoding time and video size in bytes.
|
||||
"""
|
||||
if decoder_cache is None:
|
||||
decoder_cache = _default_decoder_cache
|
||||
|
||||
if importlib.util.find_spec("torchcodec"):
|
||||
from torchcodec.decoders import VideoDecoder
|
||||
else:
|
||||
raise ImportError("torchcodec is required but not available.")
|
||||
# Use cached decoder instead of creating new one each time
|
||||
decoder = decoder_cache.get_decoder(str(video_path))
|
||||
|
||||
# initialize video decoder
|
||||
decoder = VideoDecoder(video_path, device=device, seek_mode="approximate")
|
||||
loaded_frames = []
|
||||
loaded_ts = []
|
||||
loaded_frames = []
|
||||
|
||||
# get metadata for frame information
|
||||
metadata = decoder.metadata
|
||||
average_fps = metadata.average_fps
|
||||
|
||||
# convert timestamps to frame indices
|
||||
frame_indices = [round(ts * average_fps) for ts in timestamps]
|
||||
|
||||
# retrieve frames based on indices
|
||||
frames_batch = decoder.get_frames_at(indices=frame_indices)
|
||||
|
||||
for frame, pts in zip(frames_batch.data, frames_batch.pts_seconds, strict=False):
|
||||
for frame, pts in zip(frames_batch.data, frames_batch.pts_seconds, strict=True):
|
||||
loaded_frames.append(frame)
|
||||
loaded_ts.append(pts.item())
|
||||
if log_loaded_timestamps:
|
||||
@@ -236,10 +289,14 @@ def decode_video_frames_torchcodec(
|
||||
if log_loaded_timestamps:
|
||||
logging.info(f"{closest_ts=}")
|
||||
|
||||
# convert to float32 in [0,1] range (channel first)
|
||||
closest_frames = closest_frames.type(torch.float32) / 255
|
||||
# convert to float32 in [0,1] range
|
||||
closest_frames = (closest_frames / 255.0).type(torch.float32)
|
||||
|
||||
if not len(timestamps) == len(closest_frames):
|
||||
raise FrameTimestampError(
|
||||
f"Retrieved timestamps differ from queried {set(closest_frames) - set(timestamps)}"
|
||||
)
|
||||
|
||||
assert len(timestamps) == len(closest_frames)
|
||||
return closest_frames
|
||||
|
||||
|
||||
@@ -263,7 +320,11 @@ def encode_video_frames(
|
||||
video_path = Path(video_path)
|
||||
imgs_dir = Path(imgs_dir)
|
||||
|
||||
video_path.parent.mkdir(parents=True, exist_ok=overwrite)
|
||||
if video_path.exists() and not overwrite:
|
||||
logging.warning(f"Video file already exists: {video_path}. Skipping encoding.")
|
||||
return
|
||||
|
||||
video_path.parent.mkdir(parents=True, exist_ok=True)
|
||||
|
||||
# Encoders/pixel formats incompatibility check
|
||||
if (vcodec == "libsvtav1" or vcodec == "hevc") and pix_fmt == "yuv444p":
|
||||
@@ -273,9 +334,9 @@ def encode_video_frames(
|
||||
pix_fmt = "yuv420p"
|
||||
|
||||
# Get input frames
|
||||
template = "frame_" + ("[0-9]" * 6) + ".png"
|
||||
template = "frame-" + ("[0-9]" * 6) + ".png"
|
||||
input_list = sorted(
|
||||
glob.glob(str(imgs_dir / template)), key=lambda x: int(x.split("_")[-1].split(".")[0])
|
||||
glob.glob(str(imgs_dir / template)), key=lambda x: int(x.split("-")[-1].split(".")[0])
|
||||
)
|
||||
|
||||
# Define video output frame size (assuming all input frames are the same size)
|
||||
@@ -300,7 +361,7 @@ def encode_video_frames(
|
||||
|
||||
# Set logging level
|
||||
if log_level is not None:
|
||||
# "While less efficient, it is generally preferable to modify logging with Python’s logging"
|
||||
# "While less efficient, it is generally preferable to modify logging with Python's logging"
|
||||
logging.getLogger("libav").setLevel(log_level)
|
||||
|
||||
# Create and open output file (overwrite by default)
|
||||
@@ -331,6 +392,89 @@ def encode_video_frames(
|
||||
raise OSError(f"Video encoding did not work. File not found: {video_path}.")
|
||||
|
||||
|
||||
def concatenate_video_files(
|
||||
input_video_paths: list[Path | str], output_video_path: Path, overwrite: bool = True
|
||||
):
|
||||
"""
|
||||
Concatenate multiple video files into a single video file using pyav.
|
||||
|
||||
This function takes a list of video input file paths and concatenates them into a single
|
||||
output video file. It uses ffmpeg's concat demuxer with stream copy mode for fast
|
||||
concatenation without re-encoding.
|
||||
|
||||
Args:
|
||||
input_video_paths: Ordered list of input video file paths to concatenate.
|
||||
output_video_path: Path to the output video file.
|
||||
overwrite: Whether to overwrite the output video file if it already exists. Default is True.
|
||||
|
||||
Note:
|
||||
- Creates a temporary directory for intermediate files that is cleaned up after use.
|
||||
- Uses ffmpeg's concat demuxer which requires all input videos to have the same
|
||||
codec, resolution, and frame rate for proper concatenation.
|
||||
"""
|
||||
|
||||
output_video_path = Path(output_video_path)
|
||||
|
||||
if output_video_path.exists() and not overwrite:
|
||||
logging.warning(f"Video file already exists: {output_video_path}. Skipping concatenation.")
|
||||
return
|
||||
|
||||
output_video_path.parent.mkdir(parents=True, exist_ok=True)
|
||||
|
||||
if len(input_video_paths) == 0:
|
||||
raise FileNotFoundError("No input video paths provided.")
|
||||
|
||||
# Create a temporary .ffconcat file to list the input video paths
|
||||
with tempfile.NamedTemporaryFile(mode="w", suffix=".ffconcat", delete=False) as tmp_concatenate_file:
|
||||
tmp_concatenate_file.write("ffconcat version 1.0\n")
|
||||
for input_path in input_video_paths:
|
||||
tmp_concatenate_file.write(f"file '{str(input_path)}'\n")
|
||||
tmp_concatenate_file.flush()
|
||||
tmp_concatenate_path = tmp_concatenate_file.name
|
||||
|
||||
# Create input and output containers
|
||||
input_container = av.open(
|
||||
tmp_concatenate_path, mode="r", format="concat", options={"safe": "0"}
|
||||
) # safe = 0 allows absolute paths as well as relative paths
|
||||
|
||||
tmp_output_video_path = tempfile.NamedTemporaryFile(suffix=".mp4", delete=False).name
|
||||
output_container = av.open(
|
||||
tmp_output_video_path, mode="w", options={"movflags": "faststart"}
|
||||
) # faststart is to move the metadata to the beginning of the file to speed up loading
|
||||
|
||||
# Replicate input streams in output container
|
||||
stream_map = {}
|
||||
for input_stream in input_container.streams:
|
||||
if input_stream.type in ("video", "audio", "subtitle"): # only copy compatible streams
|
||||
stream_map[input_stream.index] = output_container.add_stream_from_template(
|
||||
template=input_stream, opaque=True
|
||||
)
|
||||
stream_map[
|
||||
input_stream.index
|
||||
].time_base = (
|
||||
input_stream.time_base
|
||||
) # set the time base to the input stream time base (missing in the codec context)
|
||||
|
||||
# Demux + remux packets (no re-encode)
|
||||
for packet in input_container.demux():
|
||||
# Skip packets from un-mapped streams
|
||||
if packet.stream.index not in stream_map:
|
||||
continue
|
||||
|
||||
# Skip demux flushing packets
|
||||
if packet.dts is None:
|
||||
continue
|
||||
|
||||
output_stream = stream_map[packet.stream.index]
|
||||
packet.stream = output_stream
|
||||
output_container.mux(packet)
|
||||
|
||||
input_container.close()
|
||||
output_container.close()
|
||||
shutil.move(tmp_output_video_path, output_video_path)
|
||||
Path(tmp_concatenate_path).unlink()
|
||||
|
||||
|
||||
@dataclass
|
||||
class VideoFrame:
|
||||
# TODO(rcadene, lhoestq): move to Hugging Face `datasets` repo
|
||||
@@ -454,6 +598,28 @@ def get_image_pixel_channels(image: Image):
|
||||
raise ValueError("Unknown format")
|
||||
|
||||
|
||||
def get_video_duration_in_s(video_path: Path | str) -> float:
|
||||
"""
|
||||
Get the duration of a video file in seconds using PyAV.
|
||||
|
||||
Args:
|
||||
video_path: Path to the video file.
|
||||
|
||||
Returns:
|
||||
Duration of the video in seconds.
|
||||
"""
|
||||
with av.open(str(video_path)) as container:
|
||||
# Get the first video stream
|
||||
video_stream = container.streams.video[0]
|
||||
# Calculate duration: stream.duration * stream.time_base gives duration in seconds
|
||||
if video_stream.duration is not None:
|
||||
duration = float(video_stream.duration * video_stream.time_base)
|
||||
else:
|
||||
# Fallback to container duration if stream duration is not available
|
||||
duration = float(container.duration / av.time_base)
|
||||
return duration
|
||||
|
||||
|
||||
class VideoEncodingManager:
|
||||
"""
|
||||
Context manager that ensures proper video encoding and data cleanup even if exceptions occur.
|
||||
@@ -487,7 +653,7 @@ class VideoEncodingManager:
|
||||
f"Encoding remaining {self.dataset.episodes_since_last_encoding} episodes, "
|
||||
f"from episode {start_ep} to {end_ep - 1}"
|
||||
)
|
||||
self.dataset.batch_encode_videos(start_ep, end_ep)
|
||||
self.dataset._batch_save_episode_video(start_ep, end_ep)
|
||||
|
||||
# Clean up episode images if recording was interrupted
|
||||
if exc_type is not None:
|
||||
|
||||
+94
-69
@@ -30,6 +30,8 @@ class EnvConfig(draccus.ChoiceRegistry, abc.ABC):
|
||||
fps: int = 30
|
||||
features: dict[str, PolicyFeature] = field(default_factory=dict)
|
||||
features_map: dict[str, str] = field(default_factory=dict)
|
||||
max_parallel_tasks: int = 1
|
||||
disable_env_checker: bool = True
|
||||
|
||||
@property
|
||||
def type(self) -> str:
|
||||
@@ -161,35 +163,73 @@ class XarmEnv(EnvConfig):
|
||||
|
||||
|
||||
@dataclass
|
||||
class VideoRecordConfig:
|
||||
"""Configuration for video recording in ManiSkill environments."""
|
||||
|
||||
enabled: bool = False
|
||||
record_dir: str = "videos"
|
||||
trajectory_name: str = "trajectory"
|
||||
class ImagePreprocessingConfig:
|
||||
crop_params_dict: dict[str, tuple[int, int, int, int]] | None = None
|
||||
resize_size: tuple[int, int] | None = None
|
||||
|
||||
|
||||
@dataclass
|
||||
class EnvTransformConfig:
|
||||
"""Configuration for environment wrappers."""
|
||||
class RewardClassifierConfig:
|
||||
"""Configuration for reward classification."""
|
||||
|
||||
pretrained_path: str | None = None
|
||||
success_threshold: float = 0.5
|
||||
success_reward: float = 1.0
|
||||
|
||||
|
||||
@dataclass
|
||||
class InverseKinematicsConfig:
|
||||
"""Configuration for inverse kinematics processing."""
|
||||
|
||||
urdf_path: str | None = None
|
||||
target_frame_name: str | None = None
|
||||
end_effector_bounds: dict[str, list[float]] | None = None
|
||||
end_effector_step_sizes: dict[str, float] | None = None
|
||||
|
||||
|
||||
@dataclass
|
||||
class ObservationConfig:
|
||||
"""Configuration for observation processing."""
|
||||
|
||||
# ee_action_space_params: EEActionSpaceConfig = field(default_factory=EEActionSpaceConfig)
|
||||
control_mode: str = "gamepad"
|
||||
display_cameras: bool = False
|
||||
add_joint_velocity_to_observation: bool = False
|
||||
add_current_to_observation: bool = False
|
||||
add_ee_pose_to_observation: bool = False
|
||||
crop_params_dict: dict[str, tuple[int, int, int, int]] | None = None
|
||||
resize_size: tuple[int, int] | None = None
|
||||
control_time_s: float = 20.0
|
||||
fixed_reset_joint_positions: Any | None = None
|
||||
reset_time_s: float = 5.0
|
||||
display_cameras: bool = False
|
||||
|
||||
|
||||
@dataclass
|
||||
class GripperConfig:
|
||||
"""Configuration for gripper control and penalties."""
|
||||
|
||||
use_gripper: bool = True
|
||||
gripper_quantization_threshold: float | None = 0.8
|
||||
gripper_penalty: float = 0.0
|
||||
gripper_penalty_in_reward: bool = False
|
||||
|
||||
|
||||
@dataclass
|
||||
class ResetConfig:
|
||||
"""Configuration for environment reset behavior."""
|
||||
|
||||
fixed_reset_joint_positions: Any | None = None
|
||||
reset_time_s: float = 5.0
|
||||
control_time_s: float = 20.0
|
||||
terminate_on_success: bool = True
|
||||
|
||||
|
||||
@dataclass
|
||||
class HILSerlProcessorConfig:
|
||||
"""Configuration for environment processing pipeline."""
|
||||
|
||||
control_mode: str = "gamepad"
|
||||
observation: ObservationConfig | None = None
|
||||
image_preprocessing: ImagePreprocessingConfig | None = None
|
||||
gripper: GripperConfig | None = None
|
||||
reset: ResetConfig | None = None
|
||||
inverse_kinematics: InverseKinematicsConfig | None = None
|
||||
reward_classifier: RewardClassifierConfig | None = None
|
||||
max_gripper_pos: float | None = 100.0
|
||||
|
||||
|
||||
@EnvConfig.register_subclass(name="gym_manipulator")
|
||||
@dataclass
|
||||
class HILSerlRobotEnvConfig(EnvConfig):
|
||||
@@ -197,77 +237,62 @@ class HILSerlRobotEnvConfig(EnvConfig):
|
||||
|
||||
robot: RobotConfig | None = None
|
||||
teleop: TeleoperatorConfig | None = None
|
||||
wrapper: EnvTransformConfig | None = None
|
||||
fps: int = 10
|
||||
processor: HILSerlProcessorConfig = field(default_factory=HILSerlProcessorConfig)
|
||||
|
||||
name: str = "real_robot"
|
||||
mode: str | None = None # Either "record", "replay", None
|
||||
repo_id: str | None = None
|
||||
dataset_root: str | None = None
|
||||
task: str | None = ""
|
||||
num_episodes: int = 10 # only for record mode
|
||||
episode: int = 0
|
||||
device: str = "cuda"
|
||||
push_to_hub: bool = True
|
||||
pretrained_policy_name_or_path: str | None = None
|
||||
reward_classifier_pretrained_path: str | None = None
|
||||
# For the reward classifier, to record more positive examples after a success
|
||||
number_of_steps_after_success: int = 0
|
||||
|
||||
@property
|
||||
def gym_kwargs(self) -> dict:
|
||||
return {}
|
||||
|
||||
|
||||
@EnvConfig.register_subclass("hil")
|
||||
@EnvConfig.register_subclass("libero")
|
||||
@dataclass
|
||||
class HILEnvConfig(EnvConfig):
|
||||
"""Configuration for the HIL environment."""
|
||||
|
||||
name: str = "PandaPickCube"
|
||||
task: str | None = "PandaPickCubeKeyboard-v0"
|
||||
use_viewer: bool = True
|
||||
gripper_penalty: float = 0.0
|
||||
use_gamepad: bool = True
|
||||
state_dim: int = 18
|
||||
action_dim: int = 4
|
||||
fps: int = 100
|
||||
episode_length: int = 100
|
||||
video_record: VideoRecordConfig = field(default_factory=VideoRecordConfig)
|
||||
class LiberoEnv(EnvConfig):
|
||||
task: str = "libero_10" # can also choose libero_spatial, libero_object, etc.
|
||||
fps: int = 30
|
||||
episode_length: int = 520
|
||||
obs_type: str = "pixels_agent_pos"
|
||||
render_mode: str = "rgb_array"
|
||||
camera_name: str = "agentview_image,robot0_eye_in_hand_image"
|
||||
init_states: bool = True
|
||||
camera_name_mapping: dict[str, str] | None = (None,)
|
||||
features: dict[str, PolicyFeature] = field(
|
||||
default_factory=lambda: {
|
||||
"action": PolicyFeature(type=FeatureType.ACTION, shape=(4,)),
|
||||
"observation.image": PolicyFeature(type=FeatureType.VISUAL, shape=(3, 128, 128)),
|
||||
"observation.state": PolicyFeature(type=FeatureType.STATE, shape=(18,)),
|
||||
"action": PolicyFeature(type=FeatureType.ACTION, shape=(7,)),
|
||||
}
|
||||
)
|
||||
features_map: dict[str, str] = field(
|
||||
default_factory=lambda: {
|
||||
"action": ACTION,
|
||||
"observation.image": OBS_IMAGE,
|
||||
"observation.state": OBS_STATE,
|
||||
"agent_pos": OBS_STATE,
|
||||
"pixels/agentview_image": f"{OBS_IMAGES}.image",
|
||||
"pixels/robot0_eye_in_hand_image": f"{OBS_IMAGES}.image2",
|
||||
}
|
||||
)
|
||||
################# args from hilserlrobotenv
|
||||
reward_classifier_pretrained_path: str | None = None
|
||||
robot_config: RobotConfig | None = None
|
||||
teleop_config: TeleoperatorConfig | None = None
|
||||
wrapper: EnvTransformConfig | None = None
|
||||
mode: str | None = None # Either "record", "replay", None
|
||||
repo_id: str | None = None
|
||||
dataset_root: str | None = None
|
||||
num_episodes: int = 10 # only for record mode
|
||||
episode: int = 0
|
||||
device: str = "cuda"
|
||||
push_to_hub: bool = True
|
||||
pretrained_policy_name_or_path: str | None = None
|
||||
# For the reward classifier, to record more positive examples after a success
|
||||
number_of_steps_after_success: int = 0
|
||||
############################
|
||||
|
||||
def __post_init__(self):
|
||||
if self.obs_type == "pixels":
|
||||
self.features["pixels/agentview_image"] = PolicyFeature(
|
||||
type=FeatureType.VISUAL, shape=(360, 360, 3)
|
||||
)
|
||||
self.features["pixels/robot0_eye_in_hand_image"] = PolicyFeature(
|
||||
type=FeatureType.VISUAL, shape=(360, 360, 3)
|
||||
)
|
||||
elif self.obs_type == "pixels_agent_pos":
|
||||
self.features["agent_pos"] = PolicyFeature(type=FeatureType.STATE, shape=(8,))
|
||||
self.features["pixels/agentview_image"] = PolicyFeature(
|
||||
type=FeatureType.VISUAL, shape=(360, 360, 3)
|
||||
)
|
||||
self.features["pixels/robot0_eye_in_hand_image"] = PolicyFeature(
|
||||
type=FeatureType.VISUAL, shape=(360, 360, 3)
|
||||
)
|
||||
else:
|
||||
raise ValueError(f"Unsupported obs_type: {self.obs_type}")
|
||||
|
||||
@property
|
||||
def gym_kwargs(self) -> dict:
|
||||
return {
|
||||
"use_viewer": self.use_viewer,
|
||||
"use_gamepad": self.use_gamepad,
|
||||
"gripper_penalty": self.gripper_penalty,
|
||||
"obs_type": self.obs_type,
|
||||
"render_mode": self.render_mode,
|
||||
}
|
||||
|
||||
+33
-13
@@ -17,7 +17,7 @@ import importlib
|
||||
|
||||
import gymnasium as gym
|
||||
|
||||
from lerobot.envs.configs import AlohaEnv, EnvConfig, HILEnvConfig, PushtEnv, XarmEnv
|
||||
from lerobot.envs.configs import AlohaEnv, EnvConfig, LiberoEnv, PushtEnv, XarmEnv
|
||||
|
||||
|
||||
def make_env_config(env_type: str, **kwargs) -> EnvConfig:
|
||||
@@ -27,13 +27,15 @@ def make_env_config(env_type: str, **kwargs) -> EnvConfig:
|
||||
return PushtEnv(**kwargs)
|
||||
elif env_type == "xarm":
|
||||
return XarmEnv(**kwargs)
|
||||
elif env_type == "hil":
|
||||
return HILEnvConfig(**kwargs)
|
||||
elif env_type == "libero":
|
||||
return LiberoEnv(**kwargs)
|
||||
else:
|
||||
raise ValueError(f"Policy type '{env_type}' is not available.")
|
||||
|
||||
|
||||
def make_env(cfg: EnvConfig, n_envs: int = 1, use_async_envs: bool = False) -> gym.vector.VectorEnv | None:
|
||||
def make_env(
|
||||
cfg: EnvConfig, n_envs: int = 1, use_async_envs: bool = False
|
||||
) -> dict[str, dict[int, gym.vector.VectorEnv]]:
|
||||
"""Makes a gym vector environment according to the config.
|
||||
|
||||
Args:
|
||||
@@ -47,13 +49,30 @@ def make_env(cfg: EnvConfig, n_envs: int = 1, use_async_envs: bool = False) -> g
|
||||
ModuleNotFoundError: If the requested env package is not installed
|
||||
|
||||
Returns:
|
||||
gym.vector.VectorEnv: The parallelized gym.env instance.
|
||||
dict[str, dict[int, gym.vector.VectorEnv]]:
|
||||
A mapping from suite name to indexed vectorized environments.
|
||||
- For multi-task benchmarks (e.g., LIBERO): one entry per suite, and one vec env per task_id.
|
||||
- For single-task environments: a single suite entry (cfg.type) with task_id=0.
|
||||
|
||||
"""
|
||||
if n_envs < 1:
|
||||
raise ValueError("`n_envs must be at least 1")
|
||||
raise ValueError("`n_envs` must be at least 1")
|
||||
|
||||
env_cls = gym.vector.AsyncVectorEnv if use_async_envs else gym.vector.SyncVectorEnv
|
||||
|
||||
if "libero" in cfg.type:
|
||||
from lerobot.envs.libero import create_libero_envs
|
||||
|
||||
return create_libero_envs(
|
||||
task=cfg.task,
|
||||
n_envs=n_envs,
|
||||
camera_name=cfg.camera_name,
|
||||
init_states=cfg.init_states,
|
||||
gym_kwargs=cfg.gym_kwargs,
|
||||
env_cls=env_cls,
|
||||
)
|
||||
|
||||
package_name = f"gym_{cfg.type}"
|
||||
|
||||
try:
|
||||
importlib.import_module(package_name)
|
||||
except ModuleNotFoundError as e:
|
||||
@@ -62,10 +81,11 @@ def make_env(cfg: EnvConfig, n_envs: int = 1, use_async_envs: bool = False) -> g
|
||||
|
||||
gym_handle = f"{package_name}/{cfg.task}"
|
||||
|
||||
# batched version of the env that returns an observation of shape (b, c)
|
||||
env_cls = gym.vector.AsyncVectorEnv if use_async_envs else gym.vector.SyncVectorEnv
|
||||
env = env_cls(
|
||||
[lambda: gym.make(gym_handle, disable_env_checker=True, **cfg.gym_kwargs) for _ in range(n_envs)]
|
||||
)
|
||||
def _make_one():
|
||||
return gym.make(gym_handle, disable_env_checker=cfg.disable_env_checker, **(cfg.gym_kwargs or {}))
|
||||
|
||||
return env
|
||||
vec = env_cls([_make_one for _ in range(n_envs)])
|
||||
|
||||
# normalize to {suite: {task_id: vec_env}} for consistency
|
||||
suite_name = cfg.type # e.g., "pusht", "aloha"
|
||||
return {suite_name: {0: vec}}
|
||||
|
||||
@@ -0,0 +1,377 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
from __future__ import annotations
|
||||
|
||||
import os
|
||||
from collections import defaultdict
|
||||
from collections.abc import Callable, Iterable, Mapping, Sequence
|
||||
from functools import partial
|
||||
from pathlib import Path
|
||||
from typing import Any
|
||||
|
||||
import gymnasium as gym
|
||||
import numpy as np
|
||||
import torch
|
||||
from gymnasium import spaces
|
||||
from libero.libero import benchmark, get_libero_path
|
||||
from libero.libero.envs import OffScreenRenderEnv
|
||||
from robosuite.utils.transform_utils import quat2axisangle
|
||||
|
||||
|
||||
def _parse_camera_names(camera_name: str | Sequence[str]) -> list[str]:
|
||||
"""Normalize camera_name into a non-empty list of strings."""
|
||||
if isinstance(camera_name, str):
|
||||
cams = [c.strip() for c in camera_name.split(",") if c.strip()]
|
||||
elif isinstance(camera_name, (list, tuple)):
|
||||
cams = [str(c).strip() for c in camera_name if str(c).strip()]
|
||||
else:
|
||||
raise TypeError(f"camera_name must be str or sequence[str], got {type(camera_name).__name__}")
|
||||
if not cams:
|
||||
raise ValueError("camera_name resolved to an empty list.")
|
||||
return cams
|
||||
|
||||
|
||||
def _get_suite(name: str) -> benchmark.Benchmark:
|
||||
"""Instantiate a LIBERO suite by name with clear validation."""
|
||||
bench = benchmark.get_benchmark_dict()
|
||||
if name not in bench:
|
||||
raise ValueError(f"Unknown LIBERO suite '{name}'. Available: {', '.join(sorted(bench.keys()))}")
|
||||
suite = bench[name]()
|
||||
if not getattr(suite, "tasks", None):
|
||||
raise ValueError(f"Suite '{name}' has no tasks.")
|
||||
return suite
|
||||
|
||||
|
||||
def _select_task_ids(total_tasks: int, task_ids: Iterable[int] | None) -> list[int]:
|
||||
"""Validate/normalize task ids. If None → all tasks."""
|
||||
if task_ids is None:
|
||||
return list(range(total_tasks))
|
||||
ids = sorted({int(t) for t in task_ids})
|
||||
for t in ids:
|
||||
if t < 0 or t >= total_tasks:
|
||||
raise ValueError(f"task_id {t} out of range [0, {total_tasks - 1}].")
|
||||
return ids
|
||||
|
||||
|
||||
def get_task_init_states(task_suite: Any, i: int) -> np.ndarray:
|
||||
init_states_path = (
|
||||
Path(get_libero_path("init_states"))
|
||||
/ task_suite.tasks[i].problem_folder
|
||||
/ task_suite.tasks[i].init_states_file
|
||||
)
|
||||
init_states = torch.load(init_states_path, weights_only=False) # nosec B614
|
||||
return init_states
|
||||
|
||||
|
||||
def get_libero_dummy_action():
|
||||
"""Get dummy/no-op action, used to roll out the simulation while the robot does nothing."""
|
||||
return [0, 0, 0, 0, 0, 0, -1]
|
||||
|
||||
|
||||
OBS_STATE_DIM = 8
|
||||
ACTION_DIM = 7
|
||||
AGENT_POS_LOW = -1000.0
|
||||
AGENT_POS_HIGH = 1000.0
|
||||
ACTION_LOW = -1.0
|
||||
ACTION_HIGH = 1.0
|
||||
TASK_SUITE_MAX_STEPS: dict[str, int] = {
|
||||
"libero_spatial": 280, # longest training demo has 193 steps
|
||||
"libero_object": 280, # longest training demo has 254 steps
|
||||
"libero_goal": 300, # longest training demo has 270 steps
|
||||
"libero_10": 520, # longest training demo has 505 steps
|
||||
"libero_90": 400, # longest training demo has 373 steps
|
||||
}
|
||||
|
||||
|
||||
class LiberoEnv(gym.Env):
|
||||
metadata = {"render_modes": ["rgb_array"], "render_fps": 80}
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
task_suite: Any,
|
||||
task_id: int,
|
||||
task_suite_name: str,
|
||||
camera_name: str | Sequence[str] = "agentview_image,robot0_eye_in_hand_image",
|
||||
obs_type: str = "pixels",
|
||||
render_mode: str = "rgb_array",
|
||||
observation_width: int = 256,
|
||||
observation_height: int = 256,
|
||||
visualization_width: int = 640,
|
||||
visualization_height: int = 480,
|
||||
init_states: bool = True,
|
||||
episode_index: int = 0,
|
||||
camera_name_mapping: dict[str, str] | None = None,
|
||||
num_steps_wait: int = 10,
|
||||
):
|
||||
super().__init__()
|
||||
self.task_id = task_id
|
||||
self.obs_type = obs_type
|
||||
self.render_mode = render_mode
|
||||
self.observation_width = observation_width
|
||||
self.observation_height = observation_height
|
||||
self.visualization_width = visualization_width
|
||||
self.visualization_height = visualization_height
|
||||
self.init_states = init_states
|
||||
self.camera_name = _parse_camera_names(
|
||||
camera_name
|
||||
) # agentview_image (main) or robot0_eye_in_hand_image (wrist)
|
||||
|
||||
# Map raw camera names to "image1" and "image2".
|
||||
# The preprocessing step `preprocess_observation` will then prefix these with `.images.*`,
|
||||
# following the LeRobot convention (e.g., `observation.images.image`, `observation.images.image2`).
|
||||
# This ensures the policy consistently receives observations in the
|
||||
# expected format regardless of the original camera naming.
|
||||
if camera_name_mapping is None:
|
||||
camera_name_mapping = {
|
||||
"agentview_image": "image",
|
||||
"robot0_eye_in_hand_image": "image2",
|
||||
}
|
||||
self.camera_name_mapping = camera_name_mapping
|
||||
self.num_steps_wait = num_steps_wait
|
||||
self.episode_index = episode_index
|
||||
# Load once and keep
|
||||
self._init_states = get_task_init_states(task_suite, self.task_id) if self.init_states else None
|
||||
self._init_state_id = self.episode_index # tie each sub-env to a fixed init state
|
||||
|
||||
self._env = self._make_envs_task(task_suite, self.task_id)
|
||||
default_steps = 500
|
||||
self._max_episode_steps = TASK_SUITE_MAX_STEPS.get(task_suite_name, default_steps)
|
||||
|
||||
images = {}
|
||||
for cam in self.camera_name:
|
||||
images[self.camera_name_mapping[cam]] = spaces.Box(
|
||||
low=0,
|
||||
high=255,
|
||||
shape=(self.observation_height, self.observation_width, 3),
|
||||
dtype=np.uint8,
|
||||
)
|
||||
|
||||
if self.obs_type == "state":
|
||||
raise NotImplementedError(
|
||||
"The 'state' observation type is not supported in LiberoEnv. "
|
||||
"Please switch to an image-based obs_type (e.g. 'pixels', 'pixels_agent_pos')."
|
||||
)
|
||||
|
||||
elif self.obs_type == "pixels":
|
||||
self.observation_space = spaces.Dict(
|
||||
{
|
||||
"pixels": spaces.Dict(images),
|
||||
}
|
||||
)
|
||||
elif self.obs_type == "pixels_agent_pos":
|
||||
self.observation_space = spaces.Dict(
|
||||
{
|
||||
"pixels": spaces.Dict(images),
|
||||
"agent_pos": spaces.Box(
|
||||
low=AGENT_POS_LOW,
|
||||
high=AGENT_POS_HIGH,
|
||||
shape=(OBS_STATE_DIM,),
|
||||
dtype=np.float64,
|
||||
),
|
||||
}
|
||||
)
|
||||
|
||||
self.action_space = spaces.Box(
|
||||
low=ACTION_LOW, high=ACTION_HIGH, shape=(ACTION_DIM,), dtype=np.float32
|
||||
)
|
||||
|
||||
def render(self):
|
||||
raw_obs = self._env.env._get_observations()
|
||||
image = self._format_raw_obs(raw_obs)["pixels"]["image"]
|
||||
return image
|
||||
|
||||
def _make_envs_task(self, task_suite: Any, task_id: int = 0):
|
||||
task = task_suite.get_task(task_id)
|
||||
self.task = task.name
|
||||
self.task_description = task.language
|
||||
task_bddl_file = os.path.join(get_libero_path("bddl_files"), task.problem_folder, task.bddl_file)
|
||||
|
||||
env_args = {
|
||||
"bddl_file_name": task_bddl_file,
|
||||
"camera_heights": self.observation_height,
|
||||
"camera_widths": self.observation_width,
|
||||
}
|
||||
env = OffScreenRenderEnv(**env_args)
|
||||
env.reset()
|
||||
return env
|
||||
|
||||
def _format_raw_obs(self, raw_obs: dict[str, Any]) -> dict[str, Any]:
|
||||
images = {}
|
||||
for camera_name in self.camera_name:
|
||||
image = raw_obs[camera_name]
|
||||
image = image[::-1, ::-1] # rotate 180 degrees
|
||||
images[self.camera_name_mapping[camera_name]] = image
|
||||
state = np.concatenate(
|
||||
(
|
||||
raw_obs["robot0_eef_pos"],
|
||||
quat2axisangle(raw_obs["robot0_eef_quat"]),
|
||||
raw_obs["robot0_gripper_qpos"],
|
||||
)
|
||||
)
|
||||
agent_pos = state
|
||||
if self.obs_type == "pixels":
|
||||
return {"pixels": images.copy()}
|
||||
if self.obs_type == "pixels_agent_pos":
|
||||
return {
|
||||
"pixels": images.copy(),
|
||||
"agent_pos": agent_pos,
|
||||
}
|
||||
raise NotImplementedError(
|
||||
f"The observation type '{self.obs_type}' is not supported in LiberoEnv. "
|
||||
"Please switch to an image-based obs_type (e.g. 'pixels', 'pixels_agent_pos')."
|
||||
)
|
||||
|
||||
def reset(self, seed=None, **kwargs):
|
||||
super().reset(seed=seed)
|
||||
self._env.seed(seed)
|
||||
if self.init_states and self._init_states is not None:
|
||||
self._env.set_init_state(self._init_states[self._init_state_id])
|
||||
raw_obs = self._env.reset()
|
||||
|
||||
# After reset, objects may be unstable (slightly floating, intersecting, etc.).
|
||||
# Step the simulator with a no-op action for a few frames so everything settles.
|
||||
# Increasing this value can improve determinism and reproducibility across resets.
|
||||
for _ in range(self.num_steps_wait):
|
||||
raw_obs, _, _, _ = self._env.step(get_libero_dummy_action())
|
||||
observation = self._format_raw_obs(raw_obs)
|
||||
info = {"is_success": False}
|
||||
return observation, info
|
||||
|
||||
def step(self, action: np.ndarray) -> tuple[dict[str, Any], float, bool, bool, dict[str, Any]]:
|
||||
if action.ndim != 1:
|
||||
raise ValueError(
|
||||
f"Expected action to be 1-D (shape (action_dim,)), "
|
||||
f"but got shape {action.shape} with ndim={action.ndim}"
|
||||
)
|
||||
raw_obs, reward, done, info = self._env.step(action)
|
||||
|
||||
is_success = self._env.check_success()
|
||||
terminated = done or is_success
|
||||
info["is_success"] = is_success
|
||||
|
||||
observation = self._format_raw_obs(raw_obs)
|
||||
if done:
|
||||
self.reset()
|
||||
info.update(
|
||||
{
|
||||
"task": self.task,
|
||||
"task_id": self.task_id,
|
||||
"done": done,
|
||||
"is_success": is_success,
|
||||
}
|
||||
)
|
||||
truncated = False
|
||||
return observation, reward, terminated, truncated, info
|
||||
|
||||
def close(self):
|
||||
self._env.close()
|
||||
|
||||
|
||||
def _make_env_fns(
|
||||
*,
|
||||
suite,
|
||||
suite_name: str,
|
||||
task_id: int,
|
||||
n_envs: int,
|
||||
camera_names: list[str],
|
||||
init_states: bool,
|
||||
gym_kwargs: Mapping[str, Any],
|
||||
) -> list[Callable[[], LiberoEnv]]:
|
||||
"""Build n_envs factory callables for a single (suite, task_id)."""
|
||||
|
||||
def _make_env(episode_index: int, **kwargs) -> LiberoEnv:
|
||||
local_kwargs = dict(kwargs)
|
||||
return LiberoEnv(
|
||||
task_suite=suite,
|
||||
task_id=task_id,
|
||||
task_suite_name=suite_name,
|
||||
camera_name=camera_names,
|
||||
init_states=init_states,
|
||||
episode_index=episode_index,
|
||||
**local_kwargs,
|
||||
)
|
||||
|
||||
fns: list[Callable[[], LiberoEnv]] = []
|
||||
for episode_index in range(n_envs):
|
||||
fns.append(partial(_make_env, episode_index, **gym_kwargs))
|
||||
return fns
|
||||
|
||||
|
||||
# ---- Main API ----------------------------------------------------------------
|
||||
|
||||
|
||||
def create_libero_envs(
|
||||
task: str,
|
||||
n_envs: int,
|
||||
gym_kwargs: dict[str, Any] | None = None,
|
||||
camera_name: str | Sequence[str] = "agentview_image,robot0_eye_in_hand_image",
|
||||
init_states: bool = True,
|
||||
env_cls: Callable[[Sequence[Callable[[], Any]]], Any] | None = None,
|
||||
) -> dict[str, dict[int, Any]]:
|
||||
"""
|
||||
Create vectorized LIBERO environments with a consistent return shape.
|
||||
|
||||
Returns:
|
||||
dict[suite_name][task_id] -> vec_env (env_cls([...]) with exactly n_envs factories)
|
||||
Notes:
|
||||
- n_envs is the number of rollouts *per task* (episode_index = 0..n_envs-1).
|
||||
- `task` can be a single suite or a comma-separated list of suites.
|
||||
- You may pass `task_ids` (list[int]) inside `gym_kwargs` to restrict tasks per suite.
|
||||
"""
|
||||
if env_cls is None or not callable(env_cls):
|
||||
raise ValueError("env_cls must be a callable that wraps a list of environment factory callables.")
|
||||
if not isinstance(n_envs, int) or n_envs <= 0:
|
||||
raise ValueError(f"n_envs must be a positive int; got {n_envs}.")
|
||||
|
||||
gym_kwargs = dict(gym_kwargs or {})
|
||||
task_ids_filter = gym_kwargs.pop("task_ids", None) # optional: limit to specific tasks
|
||||
|
||||
camera_names = _parse_camera_names(camera_name)
|
||||
suite_names = [s.strip() for s in str(task).split(",") if s.strip()]
|
||||
if not suite_names:
|
||||
raise ValueError("`task` must contain at least one LIBERO suite name.")
|
||||
|
||||
print(
|
||||
f"Creating LIBERO envs | suites={suite_names} | n_envs(per task)={n_envs} | init_states={init_states}"
|
||||
)
|
||||
if task_ids_filter is not None:
|
||||
print(f"Restricting to task_ids={task_ids_filter}")
|
||||
|
||||
out: dict[str, dict[int, Any]] = defaultdict(dict)
|
||||
|
||||
for suite_name in suite_names:
|
||||
suite = _get_suite(suite_name)
|
||||
total = len(suite.tasks)
|
||||
selected = _select_task_ids(total, task_ids_filter)
|
||||
|
||||
if not selected:
|
||||
raise ValueError(f"No tasks selected for suite '{suite_name}' (available: {total}).")
|
||||
|
||||
for tid in selected:
|
||||
fns = _make_env_fns(
|
||||
suite=suite,
|
||||
suite_name=suite_name,
|
||||
task_id=tid,
|
||||
n_envs=n_envs,
|
||||
camera_names=camera_names,
|
||||
init_states=init_states,
|
||||
gym_kwargs=gym_kwargs,
|
||||
)
|
||||
out[suite_name][tid] = env_cls(fns)
|
||||
print(f"Built vec env | suite={suite_name} | task_id={tid} | n_envs={n_envs}")
|
||||
|
||||
# return plain dicts for predictability
|
||||
return {suite: dict(task_map) for suite, task_map in out.items()}
|
||||
@@ -14,6 +14,8 @@
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
import warnings
|
||||
from collections.abc import Mapping, Sequence
|
||||
from functools import singledispatch
|
||||
from typing import Any
|
||||
|
||||
import einops
|
||||
@@ -127,10 +129,68 @@ def check_env_attributes_and_types(env: gym.vector.VectorEnv) -> None:
|
||||
def add_envs_task(env: gym.vector.VectorEnv, observation: dict[str, Any]) -> dict[str, Any]:
|
||||
"""Adds task feature to the observation dict with respect to the first environment attribute."""
|
||||
if hasattr(env.envs[0], "task_description"):
|
||||
observation["task"] = env.call("task_description")
|
||||
task_result = env.call("task_description")
|
||||
|
||||
if isinstance(task_result, tuple):
|
||||
task_result = list(task_result)
|
||||
|
||||
if not isinstance(task_result, list):
|
||||
raise TypeError(f"Expected task_description to return a list, got {type(task_result)}")
|
||||
if not all(isinstance(item, str) for item in task_result):
|
||||
raise TypeError("All items in task_description result must be strings")
|
||||
|
||||
observation["task"] = task_result
|
||||
elif hasattr(env.envs[0], "task"):
|
||||
observation["task"] = env.call("task")
|
||||
task_result = env.call("task")
|
||||
|
||||
if isinstance(task_result, tuple):
|
||||
task_result = list(task_result)
|
||||
|
||||
if not isinstance(task_result, list):
|
||||
raise TypeError(f"Expected task to return a list, got {type(task_result)}")
|
||||
if not all(isinstance(item, str) for item in task_result):
|
||||
raise TypeError("All items in task result must be strings")
|
||||
|
||||
observation["task"] = task_result
|
||||
else: # For envs without language instructions, e.g. aloha transfer cube and etc.
|
||||
num_envs = observation[list(observation.keys())[0]].shape[0]
|
||||
observation["task"] = ["" for _ in range(num_envs)]
|
||||
return observation
|
||||
|
||||
|
||||
def _close_single_env(env: Any) -> None:
|
||||
try:
|
||||
env.close()
|
||||
except Exception as exc:
|
||||
print(f"Exception while closing env {env}: {exc}")
|
||||
|
||||
|
||||
@singledispatch
|
||||
def close_envs(obj: Any) -> None:
|
||||
"""Default: raise if the type is not recognized."""
|
||||
raise NotImplementedError(f"close_envs not implemented for type {type(obj).__name__}")
|
||||
|
||||
|
||||
@close_envs.register
|
||||
def _(env: Mapping) -> None:
|
||||
for v in env.values():
|
||||
if isinstance(v, Mapping):
|
||||
close_envs(v)
|
||||
elif hasattr(v, "close"):
|
||||
_close_single_env(v)
|
||||
|
||||
|
||||
@close_envs.register
|
||||
def _(envs: Sequence) -> None:
|
||||
if isinstance(envs, (str, bytes)):
|
||||
return
|
||||
for v in envs:
|
||||
if isinstance(v, Mapping) or isinstance(v, Sequence) and not isinstance(v, (str, bytes)):
|
||||
close_envs(v)
|
||||
elif hasattr(v, "close"):
|
||||
_close_single_env(v)
|
||||
|
||||
|
||||
@close_envs.register
|
||||
def _(env: gym.Env) -> None:
|
||||
_close_single_env(env)
|
||||
|
||||
@@ -15,6 +15,17 @@
|
||||
from .act.configuration_act import ACTConfig as ACTConfig
|
||||
from .diffusion.configuration_diffusion import DiffusionConfig as DiffusionConfig
|
||||
from .pi0.configuration_pi0 import PI0Config as PI0Config
|
||||
from .pi0.processor_pi0 import Pi0NewLineProcessor
|
||||
from .smolvla.configuration_smolvla import SmolVLAConfig as SmolVLAConfig
|
||||
from .smolvla.processor_smolvla import SmolVLANewLineProcessor
|
||||
from .tdmpc.configuration_tdmpc import TDMPCConfig as TDMPCConfig
|
||||
from .vqbet.configuration_vqbet import VQBeTConfig as VQBeTConfig
|
||||
|
||||
__all__ = [
|
||||
"ACTConfig",
|
||||
"DiffusionConfig",
|
||||
"PI0Config",
|
||||
"SmolVLAConfig",
|
||||
"TDMPCConfig",
|
||||
"VQBeTConfig",
|
||||
]
|
||||
|
||||
@@ -35,7 +35,6 @@ from torchvision.ops.misc import FrozenBatchNorm2d
|
||||
|
||||
from lerobot.constants import ACTION, OBS_IMAGES
|
||||
from lerobot.policies.act.configuration_act import ACTConfig
|
||||
from lerobot.policies.normalize import Normalize, Unnormalize
|
||||
from lerobot.policies.pretrained import PreTrainedPolicy
|
||||
|
||||
|
||||
@@ -51,27 +50,16 @@ class ACTPolicy(PreTrainedPolicy):
|
||||
def __init__(
|
||||
self,
|
||||
config: ACTConfig,
|
||||
dataset_stats: dict[str, dict[str, Tensor]] | None = None,
|
||||
):
|
||||
"""
|
||||
Args:
|
||||
config: Policy configuration class instance or None, in which case the default instantiation of
|
||||
the configuration class is used.
|
||||
dataset_stats: Dataset statistics to be used for normalization. If not passed here, it is expected
|
||||
that they will be passed with a call to `load_state_dict` before the policy is used.
|
||||
"""
|
||||
super().__init__(config)
|
||||
config.validate_features()
|
||||
self.config = config
|
||||
|
||||
self.normalize_inputs = Normalize(config.input_features, config.normalization_mapping, dataset_stats)
|
||||
self.normalize_targets = Normalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
self.unnormalize_outputs = Unnormalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
|
||||
self.model = ACT(config)
|
||||
|
||||
if config.temporal_ensemble_coeff is not None:
|
||||
@@ -137,23 +125,19 @@ class ACTPolicy(PreTrainedPolicy):
|
||||
"""Predict a chunk of actions given environment observations."""
|
||||
self.eval()
|
||||
|
||||
batch = self.normalize_inputs(batch)
|
||||
if self.config.image_features:
|
||||
batch = dict(batch) # shallow copy so that adding a key doesn't modify the original
|
||||
batch[OBS_IMAGES] = [batch[key] for key in self.config.image_features]
|
||||
|
||||
actions = self.model(batch)[0]
|
||||
actions = self.unnormalize_outputs({ACTION: actions})[ACTION]
|
||||
return actions
|
||||
|
||||
def forward(self, batch: dict[str, Tensor]) -> tuple[Tensor, dict]:
|
||||
"""Run the batch through the model and compute the loss for training or validation."""
|
||||
batch = self.normalize_inputs(batch)
|
||||
if self.config.image_features:
|
||||
batch = dict(batch) # shallow copy so that adding a key doesn't modify the original
|
||||
batch[OBS_IMAGES] = [batch[key] for key in self.config.image_features]
|
||||
|
||||
batch = self.normalize_targets(batch)
|
||||
actions_hat, (mu_hat, log_sigma_x2_hat) = self.model(batch)
|
||||
|
||||
l1_loss = (
|
||||
|
||||
@@ -0,0 +1,85 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2024 Tony Z. Zhao and The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
from typing import Any
|
||||
|
||||
import torch
|
||||
|
||||
from lerobot.constants import POLICY_POSTPROCESSOR_DEFAULT_NAME, POLICY_PREPROCESSOR_DEFAULT_NAME
|
||||
from lerobot.policies.act.configuration_act import ACTConfig
|
||||
from lerobot.processor import (
|
||||
AddBatchDimensionProcessorStep,
|
||||
DeviceProcessorStep,
|
||||
NormalizerProcessorStep,
|
||||
PolicyAction,
|
||||
PolicyProcessorPipeline,
|
||||
RenameObservationsProcessorStep,
|
||||
UnnormalizerProcessorStep,
|
||||
)
|
||||
from lerobot.processor.converters import policy_action_to_transition, transition_to_policy_action
|
||||
|
||||
|
||||
def make_act_pre_post_processors(
|
||||
config: ACTConfig,
|
||||
dataset_stats: dict[str, dict[str, torch.Tensor]] | None = None,
|
||||
) -> tuple[
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]],
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction],
|
||||
]:
|
||||
"""Creates the pre- and post-processing pipelines for the ACT policy.
|
||||
|
||||
The pre-processing pipeline handles normalization, batching, and device placement for the model inputs.
|
||||
The post-processing pipeline handles unnormalization and moves the model outputs back to the CPU.
|
||||
|
||||
Args:
|
||||
config (ACTConfig): The ACT policy configuration object.
|
||||
dataset_stats (dict[str, dict[str, torch.Tensor]] | None): A dictionary containing dataset
|
||||
statistics (e.g., mean and std) used for normalization. Defaults to None.
|
||||
|
||||
Returns:
|
||||
tuple[PolicyProcessorPipeline[dict[str, Any], dict[str, Any]], PolicyProcessorPipeline[PolicyAction, PolicyAction]]: A tuple containing the
|
||||
pre-processor pipeline and the post-processor pipeline.
|
||||
"""
|
||||
|
||||
input_steps = [
|
||||
RenameObservationsProcessorStep(rename_map={}),
|
||||
AddBatchDimensionProcessorStep(),
|
||||
DeviceProcessorStep(device=config.device),
|
||||
NormalizerProcessorStep(
|
||||
features={**config.input_features, **config.output_features},
|
||||
norm_map=config.normalization_mapping,
|
||||
stats=dataset_stats,
|
||||
device=config.device,
|
||||
),
|
||||
]
|
||||
output_steps = [
|
||||
UnnormalizerProcessorStep(
|
||||
features=config.output_features, norm_map=config.normalization_mapping, stats=dataset_stats
|
||||
),
|
||||
DeviceProcessorStep(device="cpu"),
|
||||
]
|
||||
|
||||
return (
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]](
|
||||
steps=input_steps,
|
||||
name=POLICY_PREPROCESSOR_DEFAULT_NAME,
|
||||
),
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction](
|
||||
steps=output_steps,
|
||||
name=POLICY_POSTPROCESSOR_DEFAULT_NAME,
|
||||
to_transition=policy_action_to_transition,
|
||||
to_output=transition_to_policy_action,
|
||||
),
|
||||
)
|
||||
@@ -35,7 +35,6 @@ from torch import Tensor, nn
|
||||
|
||||
from lerobot.constants import ACTION, OBS_ENV_STATE, OBS_IMAGES, OBS_STATE
|
||||
from lerobot.policies.diffusion.configuration_diffusion import DiffusionConfig
|
||||
from lerobot.policies.normalize import Normalize, Unnormalize
|
||||
from lerobot.policies.pretrained import PreTrainedPolicy
|
||||
from lerobot.policies.utils import (
|
||||
get_device_from_parameters,
|
||||
@@ -57,7 +56,6 @@ class DiffusionPolicy(PreTrainedPolicy):
|
||||
def __init__(
|
||||
self,
|
||||
config: DiffusionConfig,
|
||||
dataset_stats: dict[str, dict[str, Tensor]] | None = None,
|
||||
):
|
||||
"""
|
||||
Args:
|
||||
@@ -70,14 +68,6 @@ class DiffusionPolicy(PreTrainedPolicy):
|
||||
config.validate_features()
|
||||
self.config = config
|
||||
|
||||
self.normalize_inputs = Normalize(config.input_features, config.normalization_mapping, dataset_stats)
|
||||
self.normalize_targets = Normalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
self.unnormalize_outputs = Unnormalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
|
||||
# queues are populated during rollout of the policy, they contain the n latest observations and actions
|
||||
self._queues = None
|
||||
|
||||
@@ -106,9 +96,6 @@ class DiffusionPolicy(PreTrainedPolicy):
|
||||
batch = {k: torch.stack(list(self._queues[k]), dim=1) for k in batch if k in self._queues}
|
||||
actions = self.diffusion.generate_actions(batch)
|
||||
|
||||
# TODO(rcadene): make above methods return output dictionary?
|
||||
actions = self.unnormalize_outputs({ACTION: actions})[ACTION]
|
||||
|
||||
return actions
|
||||
|
||||
@torch.no_grad()
|
||||
@@ -137,7 +124,6 @@ class DiffusionPolicy(PreTrainedPolicy):
|
||||
if ACTION in batch:
|
||||
batch.pop(ACTION)
|
||||
|
||||
batch = self.normalize_inputs(batch)
|
||||
if self.config.image_features:
|
||||
batch = dict(batch) # shallow copy so that adding a key doesn't modify the original
|
||||
batch[OBS_IMAGES] = torch.stack([batch[key] for key in self.config.image_features], dim=-4)
|
||||
@@ -153,11 +139,9 @@ class DiffusionPolicy(PreTrainedPolicy):
|
||||
|
||||
def forward(self, batch: dict[str, Tensor]) -> tuple[Tensor, None]:
|
||||
"""Run the batch through the model and compute the loss for training or validation."""
|
||||
batch = self.normalize_inputs(batch)
|
||||
if self.config.image_features:
|
||||
batch = dict(batch) # shallow copy so that adding a key doesn't modify the original
|
||||
batch[OBS_IMAGES] = torch.stack([batch[key] for key in self.config.image_features], dim=-4)
|
||||
batch = self.normalize_targets(batch)
|
||||
loss = self.diffusion.compute_loss(batch)
|
||||
# no output_dict so returning None
|
||||
return loss, None
|
||||
|
||||
@@ -0,0 +1,92 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2024 Columbia Artificial Intelligence, Robotics Lab,
|
||||
# and The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
from typing import Any
|
||||
|
||||
import torch
|
||||
|
||||
from lerobot.constants import POLICY_POSTPROCESSOR_DEFAULT_NAME, POLICY_PREPROCESSOR_DEFAULT_NAME
|
||||
from lerobot.policies.diffusion.configuration_diffusion import DiffusionConfig
|
||||
from lerobot.processor import (
|
||||
AddBatchDimensionProcessorStep,
|
||||
DeviceProcessorStep,
|
||||
NormalizerProcessorStep,
|
||||
PolicyAction,
|
||||
PolicyProcessorPipeline,
|
||||
RenameObservationsProcessorStep,
|
||||
UnnormalizerProcessorStep,
|
||||
)
|
||||
from lerobot.processor.converters import policy_action_to_transition, transition_to_policy_action
|
||||
|
||||
|
||||
def make_diffusion_pre_post_processors(
|
||||
config: DiffusionConfig,
|
||||
dataset_stats: dict[str, dict[str, torch.Tensor]] | None = None,
|
||||
) -> tuple[
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]],
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction],
|
||||
]:
|
||||
"""
|
||||
Constructs pre-processor and post-processor pipelines for a diffusion policy.
|
||||
|
||||
The pre-processing pipeline prepares the input data for the model by:
|
||||
1. Renaming features.
|
||||
2. Normalizing the input and output features based on dataset statistics.
|
||||
3. Adding a batch dimension.
|
||||
4. Moving the data to the specified device.
|
||||
|
||||
The post-processing pipeline handles the model's output by:
|
||||
1. Moving the data to the CPU.
|
||||
2. Unnormalizing the output features to their original scale.
|
||||
|
||||
Args:
|
||||
config: The configuration object for the diffusion policy,
|
||||
containing feature definitions, normalization mappings, and device information.
|
||||
dataset_stats: A dictionary of statistics used for normalization.
|
||||
Defaults to None.
|
||||
|
||||
Returns:
|
||||
A tuple containing the configured pre-processor and post-processor pipelines.
|
||||
"""
|
||||
|
||||
input_steps = [
|
||||
RenameObservationsProcessorStep(rename_map={}),
|
||||
AddBatchDimensionProcessorStep(),
|
||||
DeviceProcessorStep(device=config.device),
|
||||
NormalizerProcessorStep(
|
||||
features={**config.input_features, **config.output_features},
|
||||
norm_map=config.normalization_mapping,
|
||||
stats=dataset_stats,
|
||||
),
|
||||
]
|
||||
output_steps = [
|
||||
UnnormalizerProcessorStep(
|
||||
features=config.output_features, norm_map=config.normalization_mapping, stats=dataset_stats
|
||||
),
|
||||
DeviceProcessorStep(device="cpu"),
|
||||
]
|
||||
return (
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]](
|
||||
steps=input_steps,
|
||||
name=POLICY_PREPROCESSOR_DEFAULT_NAME,
|
||||
),
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction](
|
||||
steps=output_steps,
|
||||
name=POLICY_POSTPROCESSOR_DEFAULT_NAME,
|
||||
to_transition=policy_action_to_transition,
|
||||
to_output=transition_to_policy_action,
|
||||
),
|
||||
)
|
||||
+223
-20
@@ -14,12 +14,17 @@
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import logging
|
||||
from __future__ import annotations
|
||||
|
||||
from torch import nn
|
||||
import logging
|
||||
from typing import Any, TypedDict
|
||||
|
||||
import torch
|
||||
from typing_extensions import Unpack
|
||||
|
||||
from lerobot.configs.policies import PreTrainedConfig
|
||||
from lerobot.configs.types import FeatureType
|
||||
from lerobot.constants import POLICY_POSTPROCESSOR_DEFAULT_NAME, POLICY_PREPROCESSOR_DEFAULT_NAME
|
||||
from lerobot.datasets.lerobot_dataset import LeRobotDatasetMetadata
|
||||
from lerobot.datasets.utils import dataset_to_policy_features
|
||||
from lerobot.envs.configs import EnvConfig
|
||||
@@ -34,10 +39,32 @@ from lerobot.policies.sac.reward_model.configuration_classifier import RewardCla
|
||||
from lerobot.policies.smolvla.configuration_smolvla import SmolVLAConfig
|
||||
from lerobot.policies.tdmpc.configuration_tdmpc import TDMPCConfig
|
||||
from lerobot.policies.vqbet.configuration_vqbet import VQBeTConfig
|
||||
from lerobot.processor import PolicyAction, PolicyProcessorPipeline
|
||||
from lerobot.processor.converters import (
|
||||
batch_to_transition,
|
||||
policy_action_to_transition,
|
||||
transition_to_batch,
|
||||
transition_to_policy_action,
|
||||
)
|
||||
|
||||
|
||||
def get_policy_class(name: str) -> PreTrainedPolicy:
|
||||
"""Get the policy's class and config class given a name (matching the policy class' `name` attribute)."""
|
||||
def get_policy_class(name: str) -> type[PreTrainedPolicy]:
|
||||
"""
|
||||
Retrieves a policy class by its registered name.
|
||||
|
||||
This function uses dynamic imports to avoid loading all policy classes into memory
|
||||
at once, improving startup time and reducing dependencies.
|
||||
|
||||
Args:
|
||||
name: The name of the policy. Supported names are "tdmpc", "diffusion", "act",
|
||||
"vqbet", "pi0", "pi0fast", "sac", "reward_classifier", "smolvla".
|
||||
|
||||
Returns:
|
||||
The policy class corresponding to the given name.
|
||||
|
||||
Raises:
|
||||
NotImplementedError: If the policy name is not recognized.
|
||||
"""
|
||||
if name == "tdmpc":
|
||||
from lerobot.policies.tdmpc.modeling_tdmpc import TDMPCPolicy
|
||||
|
||||
@@ -79,6 +106,24 @@ def get_policy_class(name: str) -> PreTrainedPolicy:
|
||||
|
||||
|
||||
def make_policy_config(policy_type: str, **kwargs) -> PreTrainedConfig:
|
||||
"""
|
||||
Instantiates a policy configuration object based on the policy type.
|
||||
|
||||
This factory function simplifies the creation of policy configuration objects by
|
||||
mapping a string identifier to the corresponding config class.
|
||||
|
||||
Args:
|
||||
policy_type: The type of the policy. Supported types include "tdmpc",
|
||||
"diffusion", "act", "vqbet", "pi0", "pi0fast", "sac", "smolvla",
|
||||
"reward_classifier".
|
||||
**kwargs: Keyword arguments to be passed to the configuration class constructor.
|
||||
|
||||
Returns:
|
||||
An instance of a `PreTrainedConfig` subclass.
|
||||
|
||||
Raises:
|
||||
ValueError: If the `policy_type` is not recognized.
|
||||
"""
|
||||
if policy_type == "tdmpc":
|
||||
return TDMPCConfig(**kwargs)
|
||||
elif policy_type == "diffusion":
|
||||
@@ -101,30 +146,187 @@ def make_policy_config(policy_type: str, **kwargs) -> PreTrainedConfig:
|
||||
raise ValueError(f"Policy type '{policy_type}' is not available.")
|
||||
|
||||
|
||||
class ProcessorConfigKwargs(TypedDict, total=False):
|
||||
"""
|
||||
A TypedDict defining the keyword arguments for processor configuration.
|
||||
|
||||
This provides type hints for the optional arguments passed to `make_pre_post_processors`,
|
||||
improving code clarity and enabling static analysis.
|
||||
|
||||
Attributes:
|
||||
preprocessor_config_filename: The filename for the preprocessor configuration.
|
||||
postprocessor_config_filename: The filename for the postprocessor configuration.
|
||||
preprocessor_overrides: A dictionary of overrides for the preprocessor configuration.
|
||||
postprocessor_overrides: A dictionary of overrides for the postprocessor configuration.
|
||||
dataset_stats: Dataset statistics for normalization.
|
||||
"""
|
||||
|
||||
preprocessor_config_filename: str | None
|
||||
postprocessor_config_filename: str | None
|
||||
preprocessor_overrides: dict[str, Any] | None
|
||||
postprocessor_overrides: dict[str, Any] | None
|
||||
dataset_stats: dict[str, dict[str, torch.Tensor]] | None
|
||||
|
||||
|
||||
def make_pre_post_processors(
|
||||
policy_cfg: PreTrainedConfig,
|
||||
pretrained_path: str | None = None,
|
||||
**kwargs: Unpack[ProcessorConfigKwargs],
|
||||
) -> tuple[
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]],
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction],
|
||||
]:
|
||||
"""
|
||||
Create or load pre- and post-processor pipelines for a given policy.
|
||||
|
||||
This function acts as a factory. It can either load existing processor pipelines
|
||||
from a pretrained path or create new ones from scratch based on the policy
|
||||
configuration. Each policy type has a dedicated factory function for its
|
||||
processors (e.g., `make_tdmpc_pre_post_processors`).
|
||||
|
||||
Args:
|
||||
policy_cfg: The configuration of the policy for which to create processors.
|
||||
pretrained_path: An optional path to load pretrained processor pipelines from.
|
||||
If provided, pipelines are loaded from this path.
|
||||
**kwargs: Keyword arguments for processor configuration, as defined in
|
||||
`ProcessorConfigKwargs`.
|
||||
|
||||
Returns:
|
||||
A tuple containing the input (pre-processor) and output (post-processor) pipelines.
|
||||
|
||||
Raises:
|
||||
NotImplementedError: If a processor factory is not implemented for the given
|
||||
policy configuration type.
|
||||
"""
|
||||
if pretrained_path:
|
||||
return (
|
||||
PolicyProcessorPipeline.from_pretrained(
|
||||
pretrained_model_name_or_path=pretrained_path,
|
||||
config_filename=kwargs.get(
|
||||
"preprocessor_config_filename", f"{POLICY_PREPROCESSOR_DEFAULT_NAME}.json"
|
||||
),
|
||||
overrides=kwargs.get("preprocessor_overrides", {}),
|
||||
to_transition=batch_to_transition,
|
||||
to_output=transition_to_batch,
|
||||
),
|
||||
PolicyProcessorPipeline.from_pretrained(
|
||||
pretrained_model_name_or_path=pretrained_path,
|
||||
config_filename=kwargs.get(
|
||||
"postprocessor_config_filename", f"{POLICY_POSTPROCESSOR_DEFAULT_NAME}.json"
|
||||
),
|
||||
overrides=kwargs.get("postprocessor_overrides", {}),
|
||||
to_transition=policy_action_to_transition,
|
||||
to_output=transition_to_policy_action,
|
||||
),
|
||||
)
|
||||
|
||||
# Create a new processor based on policy type
|
||||
if isinstance(policy_cfg, TDMPCConfig):
|
||||
from lerobot.policies.tdmpc.processor_tdmpc import make_tdmpc_pre_post_processors
|
||||
|
||||
processors = make_tdmpc_pre_post_processors(
|
||||
config=policy_cfg,
|
||||
dataset_stats=kwargs.get("dataset_stats"),
|
||||
)
|
||||
|
||||
elif isinstance(policy_cfg, DiffusionConfig):
|
||||
from lerobot.policies.diffusion.processor_diffusion import make_diffusion_pre_post_processors
|
||||
|
||||
processors = make_diffusion_pre_post_processors(
|
||||
config=policy_cfg,
|
||||
dataset_stats=kwargs.get("dataset_stats"),
|
||||
)
|
||||
|
||||
elif isinstance(policy_cfg, ACTConfig):
|
||||
from lerobot.policies.act.processor_act import make_act_pre_post_processors
|
||||
|
||||
processors = make_act_pre_post_processors(
|
||||
config=policy_cfg,
|
||||
dataset_stats=kwargs.get("dataset_stats"),
|
||||
)
|
||||
|
||||
elif isinstance(policy_cfg, VQBeTConfig):
|
||||
from lerobot.policies.vqbet.processor_vqbet import make_vqbet_pre_post_processors
|
||||
|
||||
processors = make_vqbet_pre_post_processors(
|
||||
config=policy_cfg,
|
||||
dataset_stats=kwargs.get("dataset_stats"),
|
||||
)
|
||||
|
||||
elif isinstance(policy_cfg, PI0Config):
|
||||
from lerobot.policies.pi0.processor_pi0 import make_pi0_pre_post_processors
|
||||
|
||||
processors = make_pi0_pre_post_processors(
|
||||
config=policy_cfg,
|
||||
dataset_stats=kwargs.get("dataset_stats"),
|
||||
)
|
||||
|
||||
elif isinstance(policy_cfg, PI0FASTConfig):
|
||||
from lerobot.policies.pi0fast.processor_pi0fast import make_pi0fast_pre_post_processors
|
||||
|
||||
processors = make_pi0fast_pre_post_processors(
|
||||
config=policy_cfg,
|
||||
dataset_stats=kwargs.get("dataset_stats"),
|
||||
)
|
||||
|
||||
elif isinstance(policy_cfg, SACConfig):
|
||||
from lerobot.policies.sac.processor_sac import make_sac_pre_post_processors
|
||||
|
||||
processors = make_sac_pre_post_processors(
|
||||
config=policy_cfg,
|
||||
dataset_stats=kwargs.get("dataset_stats"),
|
||||
)
|
||||
|
||||
elif isinstance(policy_cfg, RewardClassifierConfig):
|
||||
from lerobot.policies.sac.reward_model.processor_classifier import make_classifier_processor
|
||||
|
||||
processors = make_classifier_processor(
|
||||
config=policy_cfg,
|
||||
dataset_stats=kwargs.get("dataset_stats"),
|
||||
)
|
||||
|
||||
elif isinstance(policy_cfg, SmolVLAConfig):
|
||||
from lerobot.policies.smolvla.processor_smolvla import make_smolvla_pre_post_processors
|
||||
|
||||
processors = make_smolvla_pre_post_processors(
|
||||
config=policy_cfg,
|
||||
dataset_stats=kwargs.get("dataset_stats"),
|
||||
)
|
||||
|
||||
else:
|
||||
raise NotImplementedError(f"Processor for policy type '{policy_cfg.type}' is not implemented.")
|
||||
|
||||
return processors
|
||||
|
||||
|
||||
def make_policy(
|
||||
cfg: PreTrainedConfig,
|
||||
ds_meta: LeRobotDatasetMetadata | None = None,
|
||||
env_cfg: EnvConfig | None = None,
|
||||
) -> PreTrainedPolicy:
|
||||
"""Make an instance of a policy class.
|
||||
"""
|
||||
Instantiate a policy model.
|
||||
|
||||
This function exists because (for now) we need to parse features from either a dataset or an environment
|
||||
in order to properly dimension and instantiate a policy for that dataset or environment.
|
||||
This factory function handles the logic of creating a policy, which requires
|
||||
determining the input and output feature shapes. These shapes can be derived
|
||||
either from a `LeRobotDatasetMetadata` object or an `EnvConfig` object. The function
|
||||
can either initialize a new policy from scratch or load a pretrained one.
|
||||
|
||||
Args:
|
||||
cfg (PreTrainedConfig): The config of the policy to make. If `pretrained_path` is set, the policy will
|
||||
be loaded with the weights from that path.
|
||||
ds_meta (LeRobotDatasetMetadata | None, optional): Dataset metadata to take input/output shapes and
|
||||
statistics to use for (un)normalization of inputs/outputs in the policy. Defaults to None.
|
||||
env_cfg (EnvConfig | None, optional): The config of a gym environment to parse features from. Must be
|
||||
provided if ds_meta is not. Defaults to None.
|
||||
|
||||
Raises:
|
||||
ValueError: Either ds_meta or env and env_cfg must be provided.
|
||||
NotImplementedError: if the policy.type is 'vqbet' and the policy device 'mps' (due to an incompatibility)
|
||||
cfg: The configuration for the policy to be created. If `cfg.pretrained_path` is
|
||||
set, the policy will be loaded with weights from that path.
|
||||
ds_meta: Dataset metadata used to infer feature shapes and types. Also provides
|
||||
statistics for normalization layers.
|
||||
env_cfg: Environment configuration used to infer feature shapes and types.
|
||||
One of `ds_meta` or `env_cfg` must be provided.
|
||||
|
||||
Returns:
|
||||
PreTrainedPolicy: _description_
|
||||
An instantiated and device-placed policy model.
|
||||
|
||||
Raises:
|
||||
ValueError: If both or neither of `ds_meta` and `env_cfg` are provided.
|
||||
NotImplementedError: If attempting to use an unsupported policy-backend
|
||||
combination (e.g., VQBeT with 'mps').
|
||||
"""
|
||||
if bool(ds_meta) == bool(env_cfg):
|
||||
raise ValueError("Either one of a dataset metadata or a sim env must be provided.")
|
||||
@@ -147,7 +349,6 @@ def make_policy(
|
||||
kwargs = {}
|
||||
if ds_meta is not None:
|
||||
features = dataset_to_policy_features(ds_meta.features)
|
||||
kwargs["dataset_stats"] = ds_meta.stats
|
||||
else:
|
||||
if not cfg.pretrained_path:
|
||||
logging.warning(
|
||||
@@ -155,6 +356,8 @@ def make_policy(
|
||||
"rather than a dataset. Normalization modules inside the policy will have infinite values "
|
||||
"by default without stats from a dataset."
|
||||
)
|
||||
if env_cfg is None:
|
||||
raise ValueError("env_cfg cannot be None when ds_meta is not provided")
|
||||
features = env_to_policy_features(env_cfg)
|
||||
|
||||
cfg.output_features = {key: ft for key, ft in features.items() if ft.type is FeatureType.ACTION}
|
||||
@@ -171,7 +374,7 @@ def make_policy(
|
||||
policy = policy_cls(**kwargs)
|
||||
|
||||
policy.to(cfg.device)
|
||||
assert isinstance(policy, nn.Module)
|
||||
assert isinstance(policy, torch.nn.Module)
|
||||
|
||||
# policy = torch.compile(policy, mode="reduce-overhead")
|
||||
|
||||
|
||||
@@ -1,420 +0,0 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2024 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
import numpy as np
|
||||
import torch
|
||||
from torch import Tensor, nn
|
||||
|
||||
from lerobot.configs.types import FeatureType, NormalizationMode, PolicyFeature
|
||||
|
||||
|
||||
def create_stats_buffers(
|
||||
features: dict[str, PolicyFeature],
|
||||
norm_map: dict[str, NormalizationMode],
|
||||
stats: dict[str, dict[str, Tensor]] | None = None,
|
||||
) -> dict[str, dict[str, nn.ParameterDict]]:
|
||||
"""
|
||||
Create buffers per modality (e.g. "observation.image", "action") containing their mean, std, min, max
|
||||
statistics.
|
||||
|
||||
Args: (see Normalize and Unnormalize)
|
||||
|
||||
Returns:
|
||||
dict: A dictionary where keys are modalities and values are `nn.ParameterDict` containing
|
||||
`nn.Parameters` set to `requires_grad=False`, suitable to not be updated during backpropagation.
|
||||
"""
|
||||
stats_buffers = {}
|
||||
|
||||
for key, ft in features.items():
|
||||
norm_mode = norm_map.get(ft.type, NormalizationMode.IDENTITY)
|
||||
if norm_mode is NormalizationMode.IDENTITY:
|
||||
continue
|
||||
|
||||
assert isinstance(norm_mode, NormalizationMode)
|
||||
|
||||
shape = tuple(ft.shape)
|
||||
|
||||
if ft.type is FeatureType.VISUAL:
|
||||
# sanity checks
|
||||
assert len(shape) == 3, f"number of dimensions of {key} != 3 ({shape=}"
|
||||
c, h, w = shape
|
||||
assert c < h and c < w, f"{key} is not channel first ({shape=})"
|
||||
# override image shape to be invariant to height and width
|
||||
shape = (c, 1, 1)
|
||||
|
||||
# Note: we initialize mean, std, min, max to infinity. They should be overwritten
|
||||
# downstream by `stats` or `policy.load_state_dict`, as expected. During forward,
|
||||
# we assert they are not infinity anymore.
|
||||
|
||||
buffer = {}
|
||||
if norm_mode is NormalizationMode.MEAN_STD:
|
||||
mean = torch.ones(shape, dtype=torch.float32) * torch.inf
|
||||
std = torch.ones(shape, dtype=torch.float32) * torch.inf
|
||||
buffer = nn.ParameterDict(
|
||||
{
|
||||
"mean": nn.Parameter(mean, requires_grad=False),
|
||||
"std": nn.Parameter(std, requires_grad=False),
|
||||
}
|
||||
)
|
||||
elif norm_mode is NormalizationMode.MIN_MAX:
|
||||
min = torch.ones(shape, dtype=torch.float32) * torch.inf
|
||||
max = torch.ones(shape, dtype=torch.float32) * torch.inf
|
||||
buffer = nn.ParameterDict(
|
||||
{
|
||||
"min": nn.Parameter(min, requires_grad=False),
|
||||
"max": nn.Parameter(max, requires_grad=False),
|
||||
}
|
||||
)
|
||||
|
||||
# TODO(aliberts, rcadene): harmonize this to only use one framework (np or torch)
|
||||
if stats:
|
||||
if isinstance(stats[key]["mean"], np.ndarray):
|
||||
if norm_mode is NormalizationMode.MEAN_STD:
|
||||
buffer["mean"].data = torch.from_numpy(stats[key]["mean"]).to(dtype=torch.float32)
|
||||
buffer["std"].data = torch.from_numpy(stats[key]["std"]).to(dtype=torch.float32)
|
||||
elif norm_mode is NormalizationMode.MIN_MAX:
|
||||
buffer["min"].data = torch.from_numpy(stats[key]["min"]).to(dtype=torch.float32)
|
||||
buffer["max"].data = torch.from_numpy(stats[key]["max"]).to(dtype=torch.float32)
|
||||
elif isinstance(stats[key]["mean"], torch.Tensor):
|
||||
# Note: The clone is needed to make sure that the logic in save_pretrained doesn't see duplicated
|
||||
# tensors anywhere (for example, when we use the same stats for normalization and
|
||||
# unnormalization). See the logic here
|
||||
# https://github.com/huggingface/safetensors/blob/079781fd0dc455ba0fe851e2b4507c33d0c0d407/bindings/python/py_src/safetensors/torch.py#L97.
|
||||
if norm_mode is NormalizationMode.MEAN_STD:
|
||||
buffer["mean"].data = stats[key]["mean"].clone().to(dtype=torch.float32)
|
||||
buffer["std"].data = stats[key]["std"].clone().to(dtype=torch.float32)
|
||||
elif norm_mode is NormalizationMode.MIN_MAX:
|
||||
buffer["min"].data = stats[key]["min"].clone().to(dtype=torch.float32)
|
||||
buffer["max"].data = stats[key]["max"].clone().to(dtype=torch.float32)
|
||||
else:
|
||||
type_ = type(stats[key]["mean"])
|
||||
raise ValueError(f"np.ndarray or torch.Tensor expected, but type is '{type_}' instead.")
|
||||
|
||||
stats_buffers[key] = buffer
|
||||
return stats_buffers
|
||||
|
||||
|
||||
def _no_stats_error_str(name: str) -> str:
|
||||
return (
|
||||
f"`{name}` is infinity. You should either initialize with `stats` as an argument, or use a "
|
||||
"pretrained model."
|
||||
)
|
||||
|
||||
|
||||
class Normalize(nn.Module):
|
||||
"""Normalizes data (e.g. "observation.image") for more stable and faster convergence during training."""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
features: dict[str, PolicyFeature],
|
||||
norm_map: dict[str, NormalizationMode],
|
||||
stats: dict[str, dict[str, Tensor]] | None = None,
|
||||
):
|
||||
"""
|
||||
Args:
|
||||
shapes (dict): A dictionary where keys are input modalities (e.g. "observation.image") and values
|
||||
are their shapes (e.g. `[3,96,96]`]). These shapes are used to create the tensor buffer containing
|
||||
mean, std, min, max statistics. If the provided `shapes` contain keys related to images, the shape
|
||||
is adjusted to be invariant to height and width, assuming a channel-first (c, h, w) format.
|
||||
modes (dict): A dictionary where keys are output modalities (e.g. "observation.image") and values
|
||||
are their normalization modes among:
|
||||
- "mean_std": subtract the mean and divide by standard deviation.
|
||||
- "min_max": map to [-1, 1] range.
|
||||
stats (dict, optional): A dictionary where keys are output modalities (e.g. "observation.image")
|
||||
and values are dictionaries of statistic types and their values (e.g.
|
||||
`{"mean": torch.randn(3,1,1)}, "std": torch.randn(3,1,1)}`). If provided, as expected for
|
||||
training the model for the first time, these statistics will overwrite the default buffers. If
|
||||
not provided, as expected for finetuning or evaluation, the default buffers should to be
|
||||
overwritten by a call to `policy.load_state_dict(state_dict)`. That way, initializing the
|
||||
dataset is not needed to get the stats, since they are already in the policy state_dict.
|
||||
"""
|
||||
super().__init__()
|
||||
self.features = features
|
||||
self.norm_map = norm_map
|
||||
self.stats = stats
|
||||
stats_buffers = create_stats_buffers(features, norm_map, stats)
|
||||
for key, buffer in stats_buffers.items():
|
||||
setattr(self, "buffer_" + key.replace(".", "_"), buffer)
|
||||
|
||||
# TODO(rcadene): should we remove torch.no_grad?
|
||||
@torch.no_grad()
|
||||
def forward(self, batch: dict[str, Tensor]) -> dict[str, Tensor]:
|
||||
# TODO: Remove this shallow copy
|
||||
batch = dict(batch) # shallow copy avoids mutating the input batch
|
||||
for key, ft in self.features.items():
|
||||
if key not in batch:
|
||||
# FIXME(aliberts, rcadene): This might lead to silent fail!
|
||||
continue
|
||||
|
||||
norm_mode = self.norm_map.get(ft.type, NormalizationMode.IDENTITY)
|
||||
if norm_mode is NormalizationMode.IDENTITY:
|
||||
continue
|
||||
|
||||
buffer = getattr(self, "buffer_" + key.replace(".", "_"))
|
||||
|
||||
if norm_mode is NormalizationMode.MEAN_STD:
|
||||
mean = buffer["mean"]
|
||||
std = buffer["std"]
|
||||
assert not torch.isinf(mean).any(), _no_stats_error_str("mean")
|
||||
assert not torch.isinf(std).any(), _no_stats_error_str("std")
|
||||
batch[key] = (batch[key] - mean) / (std + 1e-8)
|
||||
elif norm_mode is NormalizationMode.MIN_MAX:
|
||||
min = buffer["min"]
|
||||
max = buffer["max"]
|
||||
assert not torch.isinf(min).any(), _no_stats_error_str("min")
|
||||
assert not torch.isinf(max).any(), _no_stats_error_str("max")
|
||||
# normalize to [0,1]
|
||||
batch[key] = (batch[key] - min) / (max - min + 1e-8)
|
||||
# normalize to [-1, 1]
|
||||
batch[key] = batch[key] * 2 - 1
|
||||
else:
|
||||
raise ValueError(norm_mode)
|
||||
return batch
|
||||
|
||||
|
||||
class Unnormalize(nn.Module):
|
||||
"""
|
||||
Similar to `Normalize` but unnormalizes output data (e.g. `{"action": torch.randn(b,c)}`) in their
|
||||
original range used by the environment.
|
||||
"""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
features: dict[str, PolicyFeature],
|
||||
norm_map: dict[str, NormalizationMode],
|
||||
stats: dict[str, dict[str, Tensor]] | None = None,
|
||||
):
|
||||
"""
|
||||
Args:
|
||||
shapes (dict): A dictionary where keys are input modalities (e.g. "observation.image") and values
|
||||
are their shapes (e.g. `[3,96,96]`]). These shapes are used to create the tensor buffer containing
|
||||
mean, std, min, max statistics. If the provided `shapes` contain keys related to images, the shape
|
||||
is adjusted to be invariant to height and width, assuming a channel-first (c, h, w) format.
|
||||
modes (dict): A dictionary where keys are output modalities (e.g. "observation.image") and values
|
||||
are their normalization modes among:
|
||||
- "mean_std": subtract the mean and divide by standard deviation.
|
||||
- "min_max": map to [-1, 1] range.
|
||||
stats (dict, optional): A dictionary where keys are output modalities (e.g. "observation.image")
|
||||
and values are dictionaries of statistic types and their values (e.g.
|
||||
`{"mean": torch.randn(3,1,1)}, "std": torch.randn(3,1,1)}`). If provided, as expected for
|
||||
training the model for the first time, these statistics will overwrite the default buffers. If
|
||||
not provided, as expected for finetuning or evaluation, the default buffers should to be
|
||||
overwritten by a call to `policy.load_state_dict(state_dict)`. That way, initializing the
|
||||
dataset is not needed to get the stats, since they are already in the policy state_dict.
|
||||
"""
|
||||
super().__init__()
|
||||
self.features = features
|
||||
self.norm_map = norm_map
|
||||
self.stats = stats
|
||||
# `self.buffer_observation_state["mean"]` contains `torch.tensor(state_dim)`
|
||||
stats_buffers = create_stats_buffers(features, norm_map, stats)
|
||||
for key, buffer in stats_buffers.items():
|
||||
setattr(self, "buffer_" + key.replace(".", "_"), buffer)
|
||||
|
||||
# TODO(rcadene): should we remove torch.no_grad?
|
||||
@torch.no_grad()
|
||||
def forward(self, batch: dict[str, Tensor]) -> dict[str, Tensor]:
|
||||
batch = dict(batch) # shallow copy avoids mutating the input batch
|
||||
for key, ft in self.features.items():
|
||||
if key not in batch:
|
||||
continue
|
||||
|
||||
norm_mode = self.norm_map.get(ft.type, NormalizationMode.IDENTITY)
|
||||
if norm_mode is NormalizationMode.IDENTITY:
|
||||
continue
|
||||
|
||||
buffer = getattr(self, "buffer_" + key.replace(".", "_"))
|
||||
|
||||
if norm_mode is NormalizationMode.MEAN_STD:
|
||||
mean = buffer["mean"]
|
||||
std = buffer["std"]
|
||||
assert not torch.isinf(mean).any(), _no_stats_error_str("mean")
|
||||
assert not torch.isinf(std).any(), _no_stats_error_str("std")
|
||||
batch[key] = batch[key] * std + mean
|
||||
elif norm_mode is NormalizationMode.MIN_MAX:
|
||||
min = buffer["min"]
|
||||
max = buffer["max"]
|
||||
assert not torch.isinf(min).any(), _no_stats_error_str("min")
|
||||
assert not torch.isinf(max).any(), _no_stats_error_str("max")
|
||||
batch[key] = (batch[key] + 1) / 2
|
||||
batch[key] = batch[key] * (max - min) + min
|
||||
else:
|
||||
raise ValueError(norm_mode)
|
||||
return batch
|
||||
|
||||
|
||||
# TODO (azouitine): We should replace all normalization on the policies with register_buffer normalization
|
||||
# and remove the `Normalize` and `Unnormalize` classes.
|
||||
def _initialize_stats_buffers(
|
||||
module: nn.Module,
|
||||
features: dict[str, PolicyFeature],
|
||||
norm_map: dict[str, NormalizationMode],
|
||||
stats: dict[str, dict[str, Tensor]] | None = None,
|
||||
) -> None:
|
||||
"""Register statistics buffers (mean/std or min/max) on the given *module*.
|
||||
|
||||
The logic matches the previous constructors of `NormalizeBuffer` and `UnnormalizeBuffer`,
|
||||
but is factored out so it can be reused by both classes and stay in sync.
|
||||
"""
|
||||
for key, ft in features.items():
|
||||
norm_mode = norm_map.get(ft.type, NormalizationMode.IDENTITY)
|
||||
if norm_mode is NormalizationMode.IDENTITY:
|
||||
continue
|
||||
|
||||
shape: tuple[int, ...] = tuple(ft.shape)
|
||||
if ft.type is FeatureType.VISUAL:
|
||||
# reduce spatial dimensions, keep channel dimension only
|
||||
c, *_ = shape
|
||||
shape = (c, 1, 1)
|
||||
|
||||
prefix = key.replace(".", "_")
|
||||
|
||||
if norm_mode is NormalizationMode.MEAN_STD:
|
||||
mean = torch.full(shape, torch.inf, dtype=torch.float32)
|
||||
std = torch.full(shape, torch.inf, dtype=torch.float32)
|
||||
|
||||
if stats and key in stats and "mean" in stats[key] and "std" in stats[key]:
|
||||
mean_data = stats[key]["mean"]
|
||||
std_data = stats[key]["std"]
|
||||
if isinstance(mean_data, torch.Tensor):
|
||||
# Note: The clone is needed to make sure that the logic in save_pretrained doesn't see duplicated
|
||||
# tensors anywhere (for example, when we use the same stats for normalization and
|
||||
# unnormalization). See the logic here
|
||||
# https://github.com/huggingface/safetensors/blob/079781fd0dc455ba0fe851e2b4507c33d0c0d407/bindings/python/py_src/safetensors/torch.py#L97.
|
||||
mean = mean_data.clone().to(dtype=torch.float32)
|
||||
std = std_data.clone().to(dtype=torch.float32)
|
||||
else:
|
||||
raise ValueError(f"Unsupported stats type for key '{key}' (expected ndarray or Tensor).")
|
||||
|
||||
module.register_buffer(f"{prefix}_mean", mean)
|
||||
module.register_buffer(f"{prefix}_std", std)
|
||||
continue
|
||||
|
||||
if norm_mode is NormalizationMode.MIN_MAX:
|
||||
min_val = torch.full(shape, torch.inf, dtype=torch.float32)
|
||||
max_val = torch.full(shape, torch.inf, dtype=torch.float32)
|
||||
|
||||
if stats and key in stats and "min" in stats[key] and "max" in stats[key]:
|
||||
min_data = stats[key]["min"]
|
||||
max_data = stats[key]["max"]
|
||||
if isinstance(min_data, torch.Tensor):
|
||||
min_val = min_data.clone().to(dtype=torch.float32)
|
||||
max_val = max_data.clone().to(dtype=torch.float32)
|
||||
else:
|
||||
raise ValueError(f"Unsupported stats type for key '{key}' (expected ndarray or Tensor).")
|
||||
|
||||
module.register_buffer(f"{prefix}_min", min_val)
|
||||
module.register_buffer(f"{prefix}_max", max_val)
|
||||
continue
|
||||
|
||||
raise ValueError(norm_mode)
|
||||
|
||||
|
||||
class NormalizeBuffer(nn.Module):
|
||||
"""Same as `Normalize` but statistics are stored as registered buffers rather than parameters."""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
features: dict[str, PolicyFeature],
|
||||
norm_map: dict[str, NormalizationMode],
|
||||
stats: dict[str, dict[str, Tensor]] | None = None,
|
||||
):
|
||||
super().__init__()
|
||||
self.features = features
|
||||
self.norm_map = norm_map
|
||||
|
||||
_initialize_stats_buffers(self, features, norm_map, stats)
|
||||
|
||||
def forward(self, batch: dict[str, Tensor]) -> dict[str, Tensor]:
|
||||
batch = dict(batch)
|
||||
for key, ft in self.features.items():
|
||||
if key not in batch:
|
||||
continue
|
||||
|
||||
norm_mode = self.norm_map.get(ft.type, NormalizationMode.IDENTITY)
|
||||
if norm_mode is NormalizationMode.IDENTITY:
|
||||
continue
|
||||
|
||||
prefix = key.replace(".", "_")
|
||||
|
||||
if norm_mode is NormalizationMode.MEAN_STD:
|
||||
mean = getattr(self, f"{prefix}_mean")
|
||||
std = getattr(self, f"{prefix}_std")
|
||||
assert not torch.isinf(mean).any(), _no_stats_error_str("mean")
|
||||
assert not torch.isinf(std).any(), _no_stats_error_str("std")
|
||||
batch[key] = (batch[key] - mean) / (std + 1e-8)
|
||||
continue
|
||||
|
||||
if norm_mode is NormalizationMode.MIN_MAX:
|
||||
min_val = getattr(self, f"{prefix}_min")
|
||||
max_val = getattr(self, f"{prefix}_max")
|
||||
assert not torch.isinf(min_val).any(), _no_stats_error_str("min")
|
||||
assert not torch.isinf(max_val).any(), _no_stats_error_str("max")
|
||||
batch[key] = (batch[key] - min_val) / (max_val - min_val + 1e-8)
|
||||
batch[key] = batch[key] * 2 - 1
|
||||
continue
|
||||
|
||||
raise ValueError(norm_mode)
|
||||
|
||||
return batch
|
||||
|
||||
|
||||
class UnnormalizeBuffer(nn.Module):
|
||||
"""Inverse operation of `NormalizeBuffer`. Uses registered buffers for statistics."""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
features: dict[str, PolicyFeature],
|
||||
norm_map: dict[str, NormalizationMode],
|
||||
stats: dict[str, dict[str, Tensor]] | None = None,
|
||||
):
|
||||
super().__init__()
|
||||
self.features = features
|
||||
self.norm_map = norm_map
|
||||
|
||||
_initialize_stats_buffers(self, features, norm_map, stats)
|
||||
|
||||
def forward(self, batch: dict[str, Tensor]) -> dict[str, Tensor]:
|
||||
# batch = dict(batch)
|
||||
for key, ft in self.features.items():
|
||||
if key not in batch:
|
||||
continue
|
||||
|
||||
norm_mode = self.norm_map.get(ft.type, NormalizationMode.IDENTITY)
|
||||
if norm_mode is NormalizationMode.IDENTITY:
|
||||
continue
|
||||
|
||||
prefix = key.replace(".", "_")
|
||||
|
||||
if norm_mode is NormalizationMode.MEAN_STD:
|
||||
mean = getattr(self, f"{prefix}_mean")
|
||||
std = getattr(self, f"{prefix}_std")
|
||||
assert not torch.isinf(mean).any(), _no_stats_error_str("mean")
|
||||
assert not torch.isinf(std).any(), _no_stats_error_str("std")
|
||||
batch[key] = batch[key] * std + mean
|
||||
continue
|
||||
|
||||
if norm_mode is NormalizationMode.MIN_MAX:
|
||||
min_val = getattr(self, f"{prefix}_min")
|
||||
max_val = getattr(self, f"{prefix}_max")
|
||||
assert not torch.isinf(min_val).any(), _no_stats_error_str("min")
|
||||
assert not torch.isinf(max_val).any(), _no_stats_error_str("max")
|
||||
batch[key] = (batch[key] + 1) / 2
|
||||
batch[key] = batch[key] * (max_val - min_val) + min_val
|
||||
continue
|
||||
|
||||
raise ValueError(norm_mode)
|
||||
|
||||
return batch
|
||||
@@ -56,18 +56,15 @@ from collections import deque
|
||||
import torch
|
||||
import torch.nn.functional as F # noqa: N812
|
||||
from torch import Tensor, nn
|
||||
from transformers import AutoTokenizer
|
||||
|
||||
from lerobot.constants import ACTION, OBS_STATE
|
||||
from lerobot.policies.normalize import Normalize, Unnormalize
|
||||
from lerobot.constants import ACTION, OBS_LANGUAGE_ATTENTION_MASK, OBS_LANGUAGE_TOKENS, OBS_STATE
|
||||
from lerobot.policies.pi0.configuration_pi0 import PI0Config
|
||||
from lerobot.policies.pi0.paligemma_with_expert import (
|
||||
PaliGemmaWithExpertConfig,
|
||||
PaliGemmaWithExpertModel,
|
||||
)
|
||||
from lerobot.policies.pretrained import PreTrainedPolicy
|
||||
from lerobot.policies.utils import log_model_loading_keys
|
||||
from lerobot.utils.utils import get_safe_dtype, init_logging
|
||||
from lerobot.utils.utils import get_safe_dtype
|
||||
|
||||
|
||||
def create_sinusoidal_pos_embedding(
|
||||
@@ -223,28 +220,17 @@ class PI0Policy(PreTrainedPolicy):
|
||||
def __init__(
|
||||
self,
|
||||
config: PI0Config,
|
||||
dataset_stats: dict[str, dict[str, Tensor]] | None = None,
|
||||
):
|
||||
"""
|
||||
Args:
|
||||
config: Policy configuration class instance or None, in which case the default instantiation of
|
||||
the configuration class is used.
|
||||
dataset_stats: Dataset statistics to be used for normalization. If not passed here, it is expected
|
||||
that they will be passed with a call to `load_state_dict` before the policy is used.
|
||||
"""
|
||||
|
||||
super().__init__(config)
|
||||
config.validate_features()
|
||||
self.config = config
|
||||
self.normalize_inputs = Normalize(config.input_features, config.normalization_mapping, dataset_stats)
|
||||
self.normalize_targets = Normalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
self.unnormalize_outputs = Unnormalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
|
||||
self.language_tokenizer = AutoTokenizer.from_pretrained("google/paligemma-3b-pt-224")
|
||||
self.model = PI0FlowMatching(config)
|
||||
|
||||
self.reset()
|
||||
@@ -253,99 +239,6 @@ class PI0Policy(PreTrainedPolicy):
|
||||
"""This should be called whenever the environment is reset."""
|
||||
self._action_queue = deque([], maxlen=self.config.n_action_steps)
|
||||
|
||||
@classmethod
|
||||
def _transform_state_dict_keys(cls, state_dict: dict) -> dict:
|
||||
"""
|
||||
Transform state dict keys to match expected model structure.
|
||||
|
||||
Transformations:
|
||||
- model.paligemma_with_expert.paligemma.language_model.lm_head ->
|
||||
model.paligemma_with_expert.paligemma.lm_head
|
||||
- model.paligemma_with_expert.paligemma.language_model.model ->
|
||||
model.paligemma_with_expert.paligemma.model.language_model
|
||||
- model.paligemma_with_expert.paligemma.vision_tower ->
|
||||
model.paligemma_with_expert.paligemma.model.vision_tower
|
||||
- model.paligemma_with_expert.paligemma.multi_modal_projector ->
|
||||
model.paligemma_with_expert.paligemma.model.multi_modal_projector
|
||||
|
||||
Also handles tied weights between lm_head.weight and
|
||||
embed_tokens.weight.
|
||||
"""
|
||||
import re
|
||||
|
||||
transformed_dict = {}
|
||||
|
||||
transformations = [
|
||||
(
|
||||
re.compile(r"\.paligemma_with_expert\.paligemma\.language_model\.lm_head"),
|
||||
".paligemma_with_expert.paligemma.lm_head",
|
||||
),
|
||||
(
|
||||
re.compile(r"\.paligemma_with_expert\.paligemma\.language_model\.model"),
|
||||
".paligemma_with_expert.paligemma.model.language_model",
|
||||
),
|
||||
(
|
||||
re.compile(r"\.paligemma_with_expert\.paligemma\.vision_tower"),
|
||||
".paligemma_with_expert.paligemma.model.vision_tower",
|
||||
),
|
||||
(
|
||||
re.compile(r"\.paligemma_with_expert\.paligemma\.multi_modal_projector"),
|
||||
".paligemma_with_expert.paligemma.model.multi_modal_projector",
|
||||
),
|
||||
]
|
||||
|
||||
for key, value in state_dict.items():
|
||||
new_key = key
|
||||
for pattern, replacement in transformations:
|
||||
new_key = pattern.sub(replacement, new_key)
|
||||
transformed_dict[new_key] = value
|
||||
|
||||
# Handle tied weights: lm_head.weight and embed_tokens.weight share memory
|
||||
lm_head_key = None
|
||||
embed_tokens_key = None
|
||||
|
||||
for key in transformed_dict:
|
||||
if key.endswith(".paligemma_with_expert.paligemma.lm_head.weight"):
|
||||
lm_head_key = key
|
||||
elif key.endswith(".paligemma_with_expert.paligemma.model.language_model.embed_tokens.weight"):
|
||||
embed_tokens_key = key
|
||||
if lm_head_key and embed_tokens_key:
|
||||
break
|
||||
|
||||
if lm_head_key and not embed_tokens_key:
|
||||
embed_tokens_key = lm_head_key.replace(
|
||||
".lm_head.weight", ".model.language_model.embed_tokens.weight"
|
||||
)
|
||||
transformed_dict[embed_tokens_key] = transformed_dict[lm_head_key]
|
||||
elif embed_tokens_key and not lm_head_key:
|
||||
lm_head_key = embed_tokens_key.replace(
|
||||
".model.language_model.embed_tokens.weight", ".lm_head.weight"
|
||||
)
|
||||
transformed_dict[lm_head_key] = transformed_dict[embed_tokens_key]
|
||||
|
||||
return transformed_dict
|
||||
|
||||
@classmethod
|
||||
def _load_as_safetensor(
|
||||
cls, model: "PI0Policy", model_file: str, map_location: str, strict: bool
|
||||
) -> "PI0Policy":
|
||||
"""Override to apply key transformations before loading."""
|
||||
from safetensors.torch import load_file
|
||||
|
||||
init_logging()
|
||||
# Load the state dict from file safely
|
||||
state_dict = load_file(model_file, device=map_location)
|
||||
|
||||
# Apply key transformations
|
||||
transformed_state_dict = cls._transform_state_dict_keys(state_dict)
|
||||
|
||||
# Load the transformed state dict
|
||||
msg = model.load_state_dict(transformed_state_dict, strict=strict)
|
||||
|
||||
# Log message
|
||||
log_model_loading_keys(msg.missing_keys, msg.unexpected_keys)
|
||||
return model
|
||||
|
||||
def get_optim_params(self) -> dict:
|
||||
return self.parameters()
|
||||
|
||||
@@ -377,14 +270,13 @@ class PI0Policy(PreTrainedPolicy):
|
||||
if self.config.adapt_to_pi_aloha:
|
||||
batch[OBS_STATE] = self._pi_aloha_decode_state(batch[OBS_STATE])
|
||||
|
||||
batch = self.normalize_inputs(batch)
|
||||
|
||||
# Action queue logic for n_action_steps > 1. When the action_queue is depleted, populate it by
|
||||
# querying the policy.
|
||||
if len(self._action_queue) == 0:
|
||||
images, img_masks = self.prepare_images(batch)
|
||||
state = self.prepare_state(batch)
|
||||
lang_tokens, lang_masks = self.prepare_language(batch)
|
||||
lang_tokens = batch[f"{OBS_LANGUAGE_TOKENS}"]
|
||||
lang_masks = batch[f"{OBS_LANGUAGE_ATTENTION_MASK}"]
|
||||
|
||||
actions = self.model.sample_actions(
|
||||
images, img_masks, lang_tokens, lang_masks, state, noise=noise
|
||||
@@ -394,8 +286,6 @@ class PI0Policy(PreTrainedPolicy):
|
||||
original_action_dim = self.config.action_feature.shape[0]
|
||||
actions = actions[:, :, :original_action_dim]
|
||||
|
||||
actions = self.unnormalize_outputs({"action": actions})["action"]
|
||||
|
||||
if self.config.adapt_to_pi_aloha:
|
||||
actions = self._pi_aloha_encode_actions(actions)
|
||||
|
||||
@@ -410,12 +300,10 @@ class PI0Policy(PreTrainedPolicy):
|
||||
batch[OBS_STATE] = self._pi_aloha_decode_state(batch[OBS_STATE])
|
||||
batch[ACTION] = self._pi_aloha_encode_actions_inv(batch[ACTION])
|
||||
|
||||
batch = self.normalize_inputs(batch)
|
||||
batch = self.normalize_targets(batch)
|
||||
|
||||
images, img_masks = self.prepare_images(batch)
|
||||
state = self.prepare_state(batch)
|
||||
lang_tokens, lang_masks = self.prepare_language(batch)
|
||||
lang_tokens = batch[f"{OBS_LANGUAGE_TOKENS}"]
|
||||
lang_masks = batch[f"{OBS_LANGUAGE_ATTENTION_MASK}"]
|
||||
actions = self.prepare_action(batch)
|
||||
actions_is_pad = batch.get("action_is_pad")
|
||||
|
||||
@@ -482,26 +370,6 @@ class PI0Policy(PreTrainedPolicy):
|
||||
|
||||
return images, img_masks
|
||||
|
||||
def prepare_language(self, batch) -> tuple[Tensor, Tensor]:
|
||||
"""Tokenize the text input"""
|
||||
device = batch[OBS_STATE].device
|
||||
tasks = batch["task"]
|
||||
|
||||
# PaliGemma prompt has to end with a new line
|
||||
tasks = [task if task.endswith("\n") else f"{task}\n" for task in tasks]
|
||||
|
||||
tokenized_prompt = self.language_tokenizer.__call__(
|
||||
tasks,
|
||||
padding="max_length",
|
||||
padding_side="right",
|
||||
max_length=self.config.tokenizer_max_length,
|
||||
return_tensors="pt",
|
||||
)
|
||||
lang_tokens = tokenized_prompt["input_ids"].to(device=device)
|
||||
lang_masks = tokenized_prompt["attention_mask"].to(device=device, dtype=torch.bool)
|
||||
|
||||
return lang_tokens, lang_masks
|
||||
|
||||
def _pi_aloha_decode_state(self, state):
|
||||
# Flip the joints.
|
||||
for motor_idx in [1, 2, 8, 9]:
|
||||
@@ -567,7 +435,7 @@ class PI0FlowMatching(nn.Module):
|
||||
└──────────────────────────────┘
|
||||
"""
|
||||
|
||||
def __init__(self, config):
|
||||
def __init__(self, config: PI0Config):
|
||||
super().__init__()
|
||||
self.config = config
|
||||
|
||||
|
||||
@@ -0,0 +1,166 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 Physical Intelligence and The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from typing import Any
|
||||
|
||||
import torch
|
||||
|
||||
from lerobot.configs.types import PipelineFeatureType, PolicyFeature
|
||||
from lerobot.constants import POLICY_POSTPROCESSOR_DEFAULT_NAME, POLICY_PREPROCESSOR_DEFAULT_NAME
|
||||
from lerobot.policies.pi0.configuration_pi0 import PI0Config
|
||||
from lerobot.processor import (
|
||||
AddBatchDimensionProcessorStep,
|
||||
ComplementaryDataProcessorStep,
|
||||
DeviceProcessorStep,
|
||||
NormalizerProcessorStep,
|
||||
PolicyAction,
|
||||
PolicyProcessorPipeline,
|
||||
ProcessorStep,
|
||||
ProcessorStepRegistry,
|
||||
RenameObservationsProcessorStep,
|
||||
TokenizerProcessorStep,
|
||||
UnnormalizerProcessorStep,
|
||||
)
|
||||
from lerobot.processor.converters import policy_action_to_transition, transition_to_policy_action
|
||||
|
||||
|
||||
@ProcessorStepRegistry.register(name="pi0_new_line_processor")
|
||||
class Pi0NewLineProcessor(ComplementaryDataProcessorStep):
|
||||
"""
|
||||
Ensures that the task description string ends with a newline character.
|
||||
|
||||
This processing step is required for compatibility with the PaliGemma tokenizer,
|
||||
which expects a newline at the end of the text prompt. It handles both single
|
||||
strings and lists of strings for the 'task' key in complementary data.
|
||||
"""
|
||||
|
||||
def complementary_data(self, complementary_data):
|
||||
"""
|
||||
Adds a newline to the 'task' field if it doesn't already have one.
|
||||
|
||||
Args:
|
||||
complementary_data: A dictionary that may contain a 'task' key with a
|
||||
string or list of strings.
|
||||
|
||||
Returns:
|
||||
A new dictionary with the modified 'task' field.
|
||||
"""
|
||||
if "task" not in complementary_data:
|
||||
return complementary_data
|
||||
|
||||
task = complementary_data["task"]
|
||||
if task is None:
|
||||
return complementary_data
|
||||
|
||||
new_complementary_data = dict(complementary_data)
|
||||
|
||||
# Handle both string and list of strings
|
||||
if isinstance(task, str):
|
||||
# Single string: add newline if not present
|
||||
if not task.endswith("\n"):
|
||||
new_complementary_data["task"] = f"{task}\n"
|
||||
elif isinstance(task, list) and all(isinstance(t, str) for t in task):
|
||||
# List of strings: add newline to each if not present
|
||||
new_complementary_data["task"] = [t if t.endswith("\n") else f"{t}\n" for t in task]
|
||||
# If task is neither string nor list of strings, leave unchanged
|
||||
|
||||
return new_complementary_data
|
||||
|
||||
def transform_features(
|
||||
self, features: dict[PipelineFeatureType, dict[str, PolicyFeature]]
|
||||
) -> dict[PipelineFeatureType, dict[str, PolicyFeature]]:
|
||||
"""
|
||||
This step does not alter the feature definitions.
|
||||
|
||||
Args:
|
||||
features: The input feature dictionary.
|
||||
|
||||
Returns:
|
||||
The unchanged feature dictionary.
|
||||
"""
|
||||
return features
|
||||
|
||||
|
||||
def make_pi0_pre_post_processors(
|
||||
config: PI0Config,
|
||||
dataset_stats: dict[str, dict[str, torch.Tensor]] | None = None,
|
||||
) -> tuple[
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]],
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction],
|
||||
]:
|
||||
"""
|
||||
Constructs pre-processor and post-processor pipelines for the PI0 policy.
|
||||
|
||||
The pre-processing pipeline prepares input data for the model by:
|
||||
1. Renaming features to match pretrained configurations.
|
||||
2. Normalizing input and output features based on dataset statistics.
|
||||
3. Adding a batch dimension.
|
||||
4. Appending a newline character to the task description for tokenizer compatibility.
|
||||
5. Tokenizing the text prompt using the PaliGemma tokenizer.
|
||||
6. Moving all data to the specified device.
|
||||
|
||||
The post-processing pipeline handles the model's output by:
|
||||
1. Moving data to the CPU.
|
||||
2. Unnormalizing the output features to their original scale.
|
||||
|
||||
Args:
|
||||
config: The configuration object for the PI0 policy.
|
||||
dataset_stats: A dictionary of statistics for normalization.
|
||||
preprocessor_kwargs: Additional arguments for the pre-processor pipeline.
|
||||
postprocessor_kwargs: Additional arguments for the post-processor pipeline.
|
||||
|
||||
Returns:
|
||||
A tuple containing the configured pre-processor and post-processor pipelines.
|
||||
"""
|
||||
|
||||
# Add remaining processors
|
||||
input_steps: list[ProcessorStep] = [
|
||||
RenameObservationsProcessorStep(rename_map={}), # To mimic the same processor as pretrained one
|
||||
AddBatchDimensionProcessorStep(),
|
||||
Pi0NewLineProcessor(), # Add newlines before tokenization for PaliGemma
|
||||
TokenizerProcessorStep(
|
||||
tokenizer_name="google/paligemma-3b-pt-224",
|
||||
max_length=config.tokenizer_max_length,
|
||||
padding_side="right",
|
||||
padding="max_length",
|
||||
),
|
||||
DeviceProcessorStep(device=config.device),
|
||||
NormalizerProcessorStep(
|
||||
features={**config.input_features, **config.output_features},
|
||||
norm_map=config.normalization_mapping,
|
||||
stats=dataset_stats,
|
||||
),
|
||||
]
|
||||
|
||||
output_steps: list[ProcessorStep] = [
|
||||
UnnormalizerProcessorStep(
|
||||
features=config.output_features, norm_map=config.normalization_mapping, stats=dataset_stats
|
||||
),
|
||||
DeviceProcessorStep(device="cpu"),
|
||||
]
|
||||
|
||||
return (
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]](
|
||||
steps=input_steps,
|
||||
name=POLICY_PREPROCESSOR_DEFAULT_NAME,
|
||||
),
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction](
|
||||
steps=output_steps,
|
||||
name=POLICY_POSTPROCESSOR_DEFAULT_NAME,
|
||||
to_transition=policy_action_to_transition,
|
||||
to_output=transition_to_policy_action,
|
||||
),
|
||||
)
|
||||
@@ -58,7 +58,6 @@ from transformers.cache_utils import HybridCache, StaticCache
|
||||
from transformers.models.auto import CONFIG_MAPPING
|
||||
|
||||
from lerobot.constants import ACTION, OBS_STATE
|
||||
from lerobot.policies.normalize import Normalize, Unnormalize
|
||||
from lerobot.policies.pi0fast.configuration_pi0fast import PI0FASTConfig
|
||||
from lerobot.policies.pretrained import PreTrainedPolicy
|
||||
|
||||
@@ -146,14 +145,6 @@ class PI0FASTPolicy(PreTrainedPolicy):
|
||||
config.validate_features()
|
||||
self.config = config
|
||||
|
||||
self.normalize_inputs = Normalize(config.input_features, config.normalization_mapping, dataset_stats)
|
||||
self.normalize_targets = Normalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
self.unnormalize_outputs = Unnormalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
|
||||
self.language_tokenizer = AutoProcessor.from_pretrained("google/paligemma-3b-pt-224")
|
||||
self.model = PI0FAST(config)
|
||||
|
||||
@@ -221,8 +212,6 @@ class PI0FASTPolicy(PreTrainedPolicy):
|
||||
if self.config.adapt_to_pi_aloha:
|
||||
batch[OBS_STATE] = self._pi_aloha_decode_state(batch[OBS_STATE])
|
||||
|
||||
batch = self.normalize_inputs(batch)
|
||||
|
||||
# Action queue logic for n_action_steps > 1. When the action_queue is depleted, populate it by
|
||||
# querying the policy.
|
||||
if len(self._action_queue) == 0:
|
||||
@@ -235,8 +224,6 @@ class PI0FASTPolicy(PreTrainedPolicy):
|
||||
] # self.config.max_action_dim # self.config.action_feature.shape[0]
|
||||
actions = actions[:, :, :original_action_dim]
|
||||
|
||||
actions = self.unnormalize_outputs({"action": actions})["action"]
|
||||
|
||||
if self.config.adapt_to_pi_aloha:
|
||||
actions = self._pi_aloha_encode_actions(actions)
|
||||
|
||||
@@ -249,8 +236,6 @@ class PI0FASTPolicy(PreTrainedPolicy):
|
||||
if self.config.adapt_to_pi_aloha:
|
||||
batch[OBS_STATE] = self._pi_aloha_decode_state(batch[OBS_STATE])
|
||||
batch[ACTION] = self._pi_aloha_encode_actions_inv(batch[ACTION])
|
||||
batch = self.normalize_inputs(batch)
|
||||
batch = self.normalize_targets(batch)
|
||||
loss_dict = self.model.forward(batch)
|
||||
return loss_dict["loss"], loss_dict
|
||||
|
||||
|
||||
@@ -0,0 +1,92 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 Physical Intelligence and The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from typing import Any
|
||||
|
||||
import torch
|
||||
|
||||
from lerobot.constants import POLICY_POSTPROCESSOR_DEFAULT_NAME, POLICY_PREPROCESSOR_DEFAULT_NAME
|
||||
from lerobot.policies.pi0fast.configuration_pi0fast import PI0FASTConfig
|
||||
from lerobot.processor import (
|
||||
AddBatchDimensionProcessorStep,
|
||||
DeviceProcessorStep,
|
||||
NormalizerProcessorStep,
|
||||
PolicyAction,
|
||||
PolicyProcessorPipeline,
|
||||
RenameObservationsProcessorStep,
|
||||
UnnormalizerProcessorStep,
|
||||
)
|
||||
from lerobot.processor.converters import policy_action_to_transition, transition_to_policy_action
|
||||
|
||||
|
||||
def make_pi0fast_pre_post_processors(
|
||||
config: PI0FASTConfig,
|
||||
dataset_stats: dict[str, dict[str, torch.Tensor]] | None = None,
|
||||
) -> tuple[
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]],
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction],
|
||||
]:
|
||||
"""
|
||||
Constructs pre-processor and post-processor pipelines for the PI0Fast policy.
|
||||
|
||||
The pre-processing pipeline prepares input data for the model by:
|
||||
1. Renaming features to match pretrained configurations.
|
||||
2. Normalizing input and output features based on dataset statistics.
|
||||
3. Adding a batch dimension.
|
||||
4. Moving all data to the specified device.
|
||||
|
||||
The post-processing pipeline handles the model's output by:
|
||||
1. Moving data to the CPU.
|
||||
2. Unnormalizing the output features to their original scale.
|
||||
|
||||
Args:
|
||||
config: The configuration object for the PI0Fast policy.
|
||||
dataset_stats: A dictionary of statistics for normalization.
|
||||
preprocessor_kwargs: Additional arguments for the pre-processor pipeline.
|
||||
postprocessor_kwargs: Additional arguments for the post-processor pipeline.
|
||||
|
||||
Returns:
|
||||
A tuple containing the configured pre-processor and post-processor pipelines.
|
||||
"""
|
||||
|
||||
input_steps = [
|
||||
RenameObservationsProcessorStep(rename_map={}), # To mimic the same processor as pretrained one
|
||||
AddBatchDimensionProcessorStep(),
|
||||
DeviceProcessorStep(device=config.device),
|
||||
NormalizerProcessorStep(
|
||||
features={**config.input_features, **config.output_features},
|
||||
norm_map=config.normalization_mapping,
|
||||
stats=dataset_stats,
|
||||
),
|
||||
]
|
||||
output_steps = [
|
||||
UnnormalizerProcessorStep(
|
||||
features=config.output_features, norm_map=config.normalization_mapping, stats=dataset_stats
|
||||
),
|
||||
DeviceProcessorStep(device="cpu"),
|
||||
]
|
||||
return (
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]](
|
||||
steps=input_steps,
|
||||
name=POLICY_PREPROCESSOR_DEFAULT_NAME,
|
||||
),
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction](
|
||||
steps=output_steps,
|
||||
name=POLICY_POSTPROCESSOR_DEFAULT_NAME,
|
||||
to_transition=policy_action_to_transition,
|
||||
to_output=transition_to_policy_action,
|
||||
),
|
||||
)
|
||||
@@ -246,7 +246,9 @@ class PreTrainedPolicy(nn.Module, HubMixin, abc.ABC):
|
||||
base_model=base_model,
|
||||
)
|
||||
|
||||
template_card = files("lerobot.templates").joinpath("lerobot_modelcard_template.md").read_text()
|
||||
template_card = (
|
||||
files("lerobot.templates").joinpath("lerobot_modelcard_template.md").read_text(encoding="utf-8")
|
||||
)
|
||||
card = ModelCard.from_template(card_data, template_str=template_card)
|
||||
card.validate()
|
||||
return card
|
||||
|
||||
@@ -28,7 +28,6 @@ import torch.nn.functional as F # noqa: N812
|
||||
from torch import Tensor
|
||||
from torch.distributions import MultivariateNormal, TanhTransform, Transform, TransformedDistribution
|
||||
|
||||
from lerobot.policies.normalize import NormalizeBuffer
|
||||
from lerobot.policies.pretrained import PreTrainedPolicy
|
||||
from lerobot.policies.sac.configuration_sac import SACConfig, is_image_feature
|
||||
from lerobot.policies.utils import get_device_from_parameters
|
||||
@@ -45,7 +44,6 @@ class SACPolicy(
|
||||
def __init__(
|
||||
self,
|
||||
config: SACConfig | None = None,
|
||||
dataset_stats: dict[str, dict[str, Tensor]] | None = None,
|
||||
):
|
||||
super().__init__(config)
|
||||
config.validate_features()
|
||||
@@ -53,7 +51,6 @@ class SACPolicy(
|
||||
|
||||
# Determine action dimension and initialize all components
|
||||
continuous_action_dim = config.output_features["action"].shape[0]
|
||||
self._init_normalization(dataset_stats)
|
||||
self._init_encoders()
|
||||
self._init_critics(continuous_action_dim)
|
||||
self._init_actor(continuous_action_dim)
|
||||
@@ -88,8 +85,7 @@ class SACPolicy(
|
||||
|
||||
observations_features = None
|
||||
if self.shared_encoder and self.actor.encoder.has_images:
|
||||
# Cache and normalize image features
|
||||
observations_features = self.actor.encoder.get_cached_image_features(batch, normalize=True)
|
||||
observations_features = self.actor.encoder.get_cached_image_features(batch)
|
||||
|
||||
actions, _, _ = self.actor(batch, observations_features)
|
||||
|
||||
@@ -391,28 +387,12 @@ class SACPolicy(
|
||||
actor_loss = ((self.temperature * log_probs) - min_q_preds).mean()
|
||||
return actor_loss
|
||||
|
||||
def _init_normalization(self, dataset_stats):
|
||||
"""Initialize input/output normalization modules."""
|
||||
self.normalize_inputs = nn.Identity()
|
||||
self.normalize_targets = nn.Identity()
|
||||
if self.config.dataset_stats is not None:
|
||||
params = _convert_normalization_params_to_tensor(self.config.dataset_stats)
|
||||
self.normalize_inputs = NormalizeBuffer(
|
||||
self.config.input_features, self.config.normalization_mapping, params
|
||||
)
|
||||
stats = dataset_stats or params
|
||||
self.normalize_targets = NormalizeBuffer(
|
||||
self.config.output_features, self.config.normalization_mapping, stats
|
||||
)
|
||||
|
||||
def _init_encoders(self):
|
||||
"""Initialize shared or separate encoders for actor and critic."""
|
||||
self.shared_encoder = self.config.shared_encoder
|
||||
self.encoder_critic = SACObservationEncoder(self.config, self.normalize_inputs)
|
||||
self.encoder_critic = SACObservationEncoder(self.config)
|
||||
self.encoder_actor = (
|
||||
self.encoder_critic
|
||||
if self.shared_encoder
|
||||
else SACObservationEncoder(self.config, self.normalize_inputs)
|
||||
self.encoder_critic if self.shared_encoder else SACObservationEncoder(self.config)
|
||||
)
|
||||
|
||||
def _init_critics(self, continuous_action_dim):
|
||||
@@ -424,9 +404,7 @@ class SACPolicy(
|
||||
)
|
||||
for _ in range(self.config.num_critics)
|
||||
]
|
||||
self.critic_ensemble = CriticEnsemble(
|
||||
encoder=self.encoder_critic, ensemble=heads, output_normalization=self.normalize_targets
|
||||
)
|
||||
self.critic_ensemble = CriticEnsemble(encoder=self.encoder_critic, ensemble=heads)
|
||||
target_heads = [
|
||||
CriticHead(
|
||||
input_dim=self.encoder_critic.output_dim + continuous_action_dim,
|
||||
@@ -434,9 +412,7 @@ class SACPolicy(
|
||||
)
|
||||
for _ in range(self.config.num_critics)
|
||||
]
|
||||
self.critic_target = CriticEnsemble(
|
||||
encoder=self.encoder_critic, ensemble=target_heads, output_normalization=self.normalize_targets
|
||||
)
|
||||
self.critic_target = CriticEnsemble(encoder=self.encoder_critic, ensemble=target_heads)
|
||||
self.critic_target.load_state_dict(self.critic_ensemble.state_dict())
|
||||
|
||||
if self.config.use_torch_compile:
|
||||
@@ -490,10 +466,9 @@ class SACPolicy(
|
||||
class SACObservationEncoder(nn.Module):
|
||||
"""Encode image and/or state vector observations."""
|
||||
|
||||
def __init__(self, config: SACConfig, input_normalizer: nn.Module) -> None:
|
||||
def __init__(self, config: SACConfig) -> None:
|
||||
super().__init__()
|
||||
self.config = config
|
||||
self.input_normalization = input_normalizer
|
||||
self._init_image_layers()
|
||||
self._init_state_layers()
|
||||
self._compute_output_dim()
|
||||
@@ -568,11 +543,10 @@ class SACObservationEncoder(nn.Module):
|
||||
def forward(
|
||||
self, obs: dict[str, Tensor], cache: dict[str, Tensor] | None = None, detach: bool = False
|
||||
) -> Tensor:
|
||||
obs = self.input_normalization(obs)
|
||||
parts = []
|
||||
if self.has_images:
|
||||
if cache is None:
|
||||
cache = self.get_cached_image_features(obs, normalize=False)
|
||||
cache = self.get_cached_image_features(obs)
|
||||
parts.append(self._encode_images(cache, detach))
|
||||
if self.has_env:
|
||||
parts.append(self.env_encoder(obs["observation.environment_state"]))
|
||||
@@ -585,7 +559,7 @@ class SACObservationEncoder(nn.Module):
|
||||
"No parts to concatenate, you should have at least one image or environment state or state"
|
||||
)
|
||||
|
||||
def get_cached_image_features(self, obs: dict[str, Tensor], normalize: bool = False) -> dict[str, Tensor]:
|
||||
def get_cached_image_features(self, obs: dict[str, Tensor]) -> dict[str, Tensor]:
|
||||
"""Extract and optionally cache image features from observations.
|
||||
|
||||
This function processes image observations through the vision encoder once and returns
|
||||
@@ -597,26 +571,17 @@ class SACObservationEncoder(nn.Module):
|
||||
- The vision encoder forward pass is typically the main computational bottleneck during training and inference
|
||||
- Caching these features can provide 2-4x speedup in training and inference
|
||||
|
||||
Normalization behavior:
|
||||
- When called from inside forward(): set normalize=False since inputs are already normalized
|
||||
- When called from outside forward(): set normalize=True to ensure proper input normalization
|
||||
|
||||
Usage patterns:
|
||||
- Called in select_action() with normalize=True
|
||||
- Called in select_action()
|
||||
- Called in learner.py's get_observation_features() to pre-compute features for all policy components
|
||||
- Called internally by forward() with normalize=False
|
||||
- Called internally by forward()
|
||||
|
||||
Args:
|
||||
obs: Dictionary of observation tensors containing image keys
|
||||
normalize: Whether to normalize observations before encoding
|
||||
Set to True when calling directly from outside the encoder's forward method
|
||||
Set to False when calling from within forward() where inputs are already normalized
|
||||
|
||||
Returns:
|
||||
Dictionary mapping image keys to their corresponding encoded features
|
||||
"""
|
||||
if normalize:
|
||||
obs = self.input_normalization(obs)
|
||||
batched = torch.cat([obs[k] for k in self.image_keys], dim=0)
|
||||
out = self.image_encoder(batched)
|
||||
chunks = torch.chunk(out, len(self.image_keys), dim=0)
|
||||
@@ -747,7 +712,6 @@ class CriticEnsemble(nn.Module):
|
||||
Args:
|
||||
encoder (SACObservationEncoder): encoder for observations.
|
||||
ensemble (List[CriticHead]): list of critic heads.
|
||||
output_normalization (nn.Module): normalization layer for actions.
|
||||
init_final (float | None): optional initializer scale for final layers.
|
||||
|
||||
Forward returns a tensor of shape (num_critics, batch_size) containing Q-values.
|
||||
@@ -757,13 +721,11 @@ class CriticEnsemble(nn.Module):
|
||||
self,
|
||||
encoder: SACObservationEncoder,
|
||||
ensemble: list[CriticHead],
|
||||
output_normalization: nn.Module,
|
||||
init_final: float | None = None,
|
||||
):
|
||||
super().__init__()
|
||||
self.encoder = encoder
|
||||
self.init_final = init_final
|
||||
self.output_normalization = output_normalization
|
||||
self.critics = nn.ModuleList(ensemble)
|
||||
|
||||
def forward(
|
||||
@@ -775,11 +737,6 @@ class CriticEnsemble(nn.Module):
|
||||
device = get_device_from_parameters(self)
|
||||
# Move each tensor in observations to device
|
||||
observations = {k: v.to(device) for k, v in observations.items()}
|
||||
# NOTE: We normalize actions it helps for sample efficiency
|
||||
actions: dict[str, torch.tensor] = {"action": actions}
|
||||
# NOTE: Normalization layer took dict in input and outputs a dict that why
|
||||
actions = self.output_normalization(actions)["action"]
|
||||
actions = actions.to(device)
|
||||
|
||||
obs_enc = self.encoder(observations, cache=observation_features)
|
||||
|
||||
|
||||
@@ -0,0 +1,92 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2024 The HuggingFace Inc. team.
|
||||
# All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from typing import Any
|
||||
|
||||
import torch
|
||||
|
||||
from lerobot.constants import POLICY_POSTPROCESSOR_DEFAULT_NAME, POLICY_PREPROCESSOR_DEFAULT_NAME
|
||||
from lerobot.policies.sac.configuration_sac import SACConfig
|
||||
from lerobot.processor import (
|
||||
AddBatchDimensionProcessorStep,
|
||||
DeviceProcessorStep,
|
||||
NormalizerProcessorStep,
|
||||
PolicyAction,
|
||||
PolicyProcessorPipeline,
|
||||
RenameObservationsProcessorStep,
|
||||
UnnormalizerProcessorStep,
|
||||
)
|
||||
from lerobot.processor.converters import policy_action_to_transition, transition_to_policy_action
|
||||
|
||||
|
||||
def make_sac_pre_post_processors(
|
||||
config: SACConfig,
|
||||
dataset_stats: dict[str, dict[str, torch.Tensor]] | None = None,
|
||||
) -> tuple[
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]],
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction],
|
||||
]:
|
||||
"""
|
||||
Constructs pre-processor and post-processor pipelines for the SAC policy.
|
||||
|
||||
The pre-processing pipeline prepares input data for the model by:
|
||||
1. Renaming features to match pretrained configurations.
|
||||
2. Normalizing input and output features based on dataset statistics.
|
||||
3. Adding a batch dimension.
|
||||
4. Moving all data to the specified device.
|
||||
|
||||
The post-processing pipeline handles the model's output by:
|
||||
1. Moving data to the CPU.
|
||||
2. Unnormalizing the output features to their original scale.
|
||||
|
||||
Args:
|
||||
config: The configuration object for the SAC policy.
|
||||
dataset_stats: A dictionary of statistics for normalization.
|
||||
|
||||
Returns:
|
||||
A tuple containing the configured pre-processor and post-processor pipelines.
|
||||
"""
|
||||
|
||||
# Add remaining processors
|
||||
input_steps = [
|
||||
RenameObservationsProcessorStep(rename_map={}),
|
||||
AddBatchDimensionProcessorStep(),
|
||||
DeviceProcessorStep(device=config.device),
|
||||
NormalizerProcessorStep(
|
||||
features={**config.input_features, **config.output_features},
|
||||
norm_map=config.normalization_mapping,
|
||||
stats=dataset_stats,
|
||||
),
|
||||
]
|
||||
output_steps = [
|
||||
UnnormalizerProcessorStep(
|
||||
features=config.output_features, norm_map=config.normalization_mapping, stats=dataset_stats
|
||||
),
|
||||
DeviceProcessorStep(device="cpu"),
|
||||
]
|
||||
return (
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]](
|
||||
steps=input_steps,
|
||||
name=POLICY_PREPROCESSOR_DEFAULT_NAME,
|
||||
),
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction](
|
||||
steps=output_steps,
|
||||
name=POLICY_POSTPROCESSOR_DEFAULT_NAME,
|
||||
to_transition=policy_action_to_transition,
|
||||
to_output=transition_to_policy_action,
|
||||
),
|
||||
)
|
||||
@@ -20,7 +20,6 @@ import torch
|
||||
from torch import Tensor, nn
|
||||
|
||||
from lerobot.constants import OBS_IMAGE, REWARD
|
||||
from lerobot.policies.normalize import Normalize, Unnormalize
|
||||
from lerobot.policies.pretrained import PreTrainedPolicy
|
||||
from lerobot.policies.sac.reward_model.configuration_classifier import RewardClassifierConfig
|
||||
|
||||
@@ -108,22 +107,12 @@ class Classifier(PreTrainedPolicy):
|
||||
def __init__(
|
||||
self,
|
||||
config: RewardClassifierConfig,
|
||||
dataset_stats: dict[str, dict[str, Tensor]] | None = None,
|
||||
):
|
||||
from transformers import AutoModel
|
||||
|
||||
super().__init__(config)
|
||||
self.config = config
|
||||
|
||||
# Initialize normalization (standardized with the policy framework)
|
||||
self.normalize_inputs = Normalize(config.input_features, config.normalization_mapping, dataset_stats)
|
||||
self.normalize_targets = Normalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
self.unnormalize_outputs = Unnormalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
|
||||
# Set up encoder
|
||||
encoder = AutoModel.from_pretrained(self.config.model_name, trust_remote_code=True)
|
||||
# Extract vision model if we're given a multimodal model
|
||||
@@ -247,10 +236,6 @@ class Classifier(PreTrainedPolicy):
|
||||
|
||||
def forward(self, batch: dict[str, Tensor]) -> tuple[Tensor, dict[str, Tensor]]:
|
||||
"""Standard forward pass for training compatible with train.py."""
|
||||
# Normalize inputs if needed
|
||||
batch = self.normalize_inputs(batch)
|
||||
batch = self.normalize_targets(batch)
|
||||
|
||||
# Extract images and labels
|
||||
images, labels = self.extract_images_and_labels(batch)
|
||||
|
||||
|
||||
@@ -0,0 +1,82 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from typing import Any
|
||||
|
||||
import torch
|
||||
|
||||
from lerobot.policies.sac.reward_model.configuration_classifier import RewardClassifierConfig
|
||||
from lerobot.processor import (
|
||||
DeviceProcessorStep,
|
||||
IdentityProcessorStep,
|
||||
NormalizerProcessorStep,
|
||||
PolicyAction,
|
||||
PolicyProcessorPipeline,
|
||||
)
|
||||
from lerobot.processor.converters import policy_action_to_transition, transition_to_policy_action
|
||||
|
||||
|
||||
def make_classifier_processor(
|
||||
config: RewardClassifierConfig,
|
||||
dataset_stats: dict[str, dict[str, torch.Tensor]] | None = None,
|
||||
) -> tuple[
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]],
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction],
|
||||
]:
|
||||
"""
|
||||
Constructs pre-processor and post-processor pipelines for the reward classifier.
|
||||
|
||||
The pre-processing pipeline prepares input data for the classifier by:
|
||||
1. Normalizing both input and output features based on dataset statistics.
|
||||
2. Moving the data to the specified device.
|
||||
|
||||
The post-processing pipeline handles the classifier's output by:
|
||||
1. Moving the data to the CPU.
|
||||
2. Applying an identity step, as no unnormalization is needed for the output logits.
|
||||
|
||||
Args:
|
||||
config: The configuration object for the RewardClassifier.
|
||||
dataset_stats: A dictionary of statistics for normalization.
|
||||
preprocessor_kwargs: Additional arguments for the pre-processor pipeline.
|
||||
postprocessor_kwargs: Additional arguments for the post-processor pipeline.
|
||||
|
||||
Returns:
|
||||
A tuple containing the configured pre-processor and post-processor pipelines.
|
||||
"""
|
||||
|
||||
input_steps = [
|
||||
NormalizerProcessorStep(
|
||||
features=config.input_features, norm_map=config.normalization_mapping, stats=dataset_stats
|
||||
),
|
||||
NormalizerProcessorStep(
|
||||
features=config.output_features, norm_map=config.normalization_mapping, stats=dataset_stats
|
||||
),
|
||||
DeviceProcessorStep(device=config.device),
|
||||
]
|
||||
output_steps = [DeviceProcessorStep(device="cpu"), IdentityProcessorStep()]
|
||||
|
||||
return (
|
||||
PolicyProcessorPipeline(
|
||||
steps=input_steps,
|
||||
name="classifier_preprocessor",
|
||||
),
|
||||
PolicyProcessorPipeline(
|
||||
steps=output_steps,
|
||||
name="classifier_postprocessor",
|
||||
to_transition=policy_action_to_transition,
|
||||
to_output=transition_to_policy_action,
|
||||
),
|
||||
)
|
||||
@@ -53,21 +53,13 @@ policy = SmolVLAPolicy.from_pretrained("lerobot/smolvla_base")
|
||||
"""
|
||||
|
||||
import math
|
||||
import os
|
||||
import re
|
||||
from collections import deque
|
||||
|
||||
import safetensors
|
||||
import torch
|
||||
import torch.nn.functional as F # noqa: N812
|
||||
from torch import Tensor, nn
|
||||
from transformers import AutoProcessor
|
||||
|
||||
from lerobot.constants import ACTION, OBS_STATE
|
||||
from lerobot.policies.normalize import (
|
||||
Normalize,
|
||||
Unnormalize,
|
||||
)
|
||||
from lerobot.constants import ACTION, OBS_LANGUAGE_ATTENTION_MASK, OBS_LANGUAGE_TOKENS, OBS_STATE
|
||||
from lerobot.policies.pretrained import PreTrainedPolicy
|
||||
from lerobot.policies.smolvla.configuration_smolvla import SmolVLAConfig
|
||||
from lerobot.policies.smolvla.smolvlm_with_expert import SmolVLMWithExpertModel
|
||||
@@ -76,102 +68,6 @@ from lerobot.policies.utils import (
|
||||
)
|
||||
from lerobot.utils.utils import get_safe_dtype
|
||||
|
||||
# Matches ".soNNN", optionally followed by "-something", up to the "_buffer_" marker
|
||||
_VARIANT_RE = re.compile(r"\.so\d+(?:-[\w]+)?_buffer_")
|
||||
|
||||
|
||||
def canonicalise(k: str) -> str:
|
||||
"""
|
||||
Remove dataset-variant markers like '.so100-blue_' or '.so100_' from a
|
||||
normalisation-buffer key.
|
||||
"""
|
||||
return _VARIANT_RE.sub(".buffer_", k)
|
||||
|
||||
|
||||
def standardise_state_dict(
|
||||
checkpoint: dict[str, torch.Tensor], ref_keys: set[str], *, verbose: bool = True
|
||||
) -> tuple[dict[str, torch.Tensor], list[str]]:
|
||||
"""
|
||||
• Re-keys `checkpoint ` so that every entry matches the *reference* key set.
|
||||
• If several variant keys collapse to the same canonical name we keep the
|
||||
first one and log the collision.
|
||||
• Returns the new dict + a list of entries that could not be matched.
|
||||
"""
|
||||
out, collisions, unmatched = {}, {}, []
|
||||
|
||||
for k, v in checkpoint.items():
|
||||
canon = canonicalise(k)
|
||||
if canon in ref_keys:
|
||||
if canon in out: # duplicate after collapsing
|
||||
collisions.setdefault(canon, []).append(k)
|
||||
else:
|
||||
out[canon] = v
|
||||
else:
|
||||
unmatched.append(k)
|
||||
|
||||
if verbose:
|
||||
for canon, variants in collisions.items():
|
||||
print(f"[standardise_state_dict] '{canon}' ← {variants}")
|
||||
if unmatched:
|
||||
print(f"[standardise_state_dict] kept {len(unmatched)} unmatched keys")
|
||||
|
||||
out.update({k: checkpoint[k] for k in unmatched})
|
||||
return out, unmatched
|
||||
|
||||
|
||||
def rename_checkpoint_keys(checkpoint: dict, rename_str: str):
|
||||
"""
|
||||
Renames keys in a checkpoint dictionary based on the given rename string.
|
||||
|
||||
Args:
|
||||
checkpoint (dict): The checkpoint dictionary.
|
||||
rename_str (str): A string specifying key mappings in the format "old1//new1,old2//new2".
|
||||
|
||||
Returns:
|
||||
dict: The modified checkpoint with renamed keys.
|
||||
"""
|
||||
|
||||
rename_dict = dict(pair.split("//") for pair in rename_str.split(","))
|
||||
|
||||
new_checkpoint = {}
|
||||
for k, v in checkpoint.items():
|
||||
for old_key, new_key in rename_dict.items():
|
||||
if old_key in k:
|
||||
k = k.replace(old_key, new_key)
|
||||
new_checkpoint[k] = v
|
||||
return new_checkpoint
|
||||
|
||||
|
||||
def load_smolvla(
|
||||
model: torch.nn.Module,
|
||||
filename: str | os.PathLike,
|
||||
*,
|
||||
device: str = "cpu",
|
||||
checkpoint_keys_mapping: str = "",
|
||||
) -> torch.nn.Module:
|
||||
state_dict = safetensors.torch.load_file(filename, device=device)
|
||||
|
||||
# Optional user-supplied renames (e.g. "model._orig_mod.//model.")
|
||||
if checkpoint_keys_mapping and "//" in checkpoint_keys_mapping:
|
||||
state_dict = rename_checkpoint_keys(state_dict, checkpoint_keys_mapping)
|
||||
|
||||
state_dict, _ = standardise_state_dict(state_dict, set(model.state_dict().keys()))
|
||||
|
||||
# HACK(aliberts): to not overwrite normalization parameters as they should come from the dataset
|
||||
norm_keys = ("normalize_inputs", "normalize_targets", "unnormalize_outputs")
|
||||
state_dict = {k: v for k, v in state_dict.items() if not k.startswith(norm_keys)}
|
||||
|
||||
missing, unexpected = model.load_state_dict(state_dict, strict=False)
|
||||
|
||||
if not all(key.startswith(norm_keys) for key in missing) or unexpected:
|
||||
raise RuntimeError(
|
||||
"SmolVLA %d missing / %d unexpected keys",
|
||||
len(missing),
|
||||
len(unexpected),
|
||||
)
|
||||
|
||||
return model
|
||||
|
||||
|
||||
def create_sinusoidal_pos_embedding(
|
||||
time: torch.tensor, dimension: int, min_period: float, max_period: float, device="cpu"
|
||||
@@ -326,28 +222,17 @@ class SmolVLAPolicy(PreTrainedPolicy):
|
||||
def __init__(
|
||||
self,
|
||||
config: SmolVLAConfig,
|
||||
dataset_stats: dict[str, dict[str, Tensor]] | None = None,
|
||||
):
|
||||
"""
|
||||
Args:
|
||||
config: Policy configuration class instance or None, in which case the default instantiation of
|
||||
the configuration class is used.
|
||||
dataset_stats: Dataset statistics to be used for normalization. If not passed here, it is expected
|
||||
that they will be passed with a call to `load_state_dict` before the policy is used.
|
||||
"""
|
||||
|
||||
super().__init__(config)
|
||||
config.validate_features()
|
||||
self.config = config
|
||||
self.normalize_inputs = Normalize(config.input_features, config.normalization_mapping, dataset_stats)
|
||||
self.normalize_targets = Normalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
self.unnormalize_outputs = Unnormalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
|
||||
self.language_tokenizer = AutoProcessor.from_pretrained(self.config.vlm_model_name).tokenizer
|
||||
self.model = VLAFlowMatching(config)
|
||||
self.reset()
|
||||
|
||||
@@ -357,23 +242,6 @@ class SmolVLAPolicy(PreTrainedPolicy):
|
||||
ACTION: deque(maxlen=self.config.n_action_steps),
|
||||
}
|
||||
|
||||
# HACK(aliberts, danaaubakirova): we overwrite this classmethod here to fix smolVLA-specific issues
|
||||
@classmethod
|
||||
def _load_as_safetensor(
|
||||
cls,
|
||||
model: "SmolVLAPolicy",
|
||||
model_file: str,
|
||||
map_location: str,
|
||||
strict: bool,
|
||||
):
|
||||
safetensors.torch.load_model(model, model_file, strict=strict, device=map_location)
|
||||
return load_smolvla(
|
||||
model,
|
||||
model_file,
|
||||
device=map_location,
|
||||
checkpoint_keys_mapping="model._orig_mod.//model.",
|
||||
)
|
||||
|
||||
def get_optim_params(self) -> dict:
|
||||
return self.parameters()
|
||||
|
||||
@@ -389,7 +257,8 @@ class SmolVLAPolicy(PreTrainedPolicy):
|
||||
|
||||
images, img_masks = self.prepare_images(batch)
|
||||
state = self.prepare_state(batch)
|
||||
lang_tokens, lang_masks = self.prepare_language(batch)
|
||||
lang_tokens = batch[f"{OBS_LANGUAGE_TOKENS}"]
|
||||
lang_masks = batch[f"{OBS_LANGUAGE_ATTENTION_MASK}"]
|
||||
|
||||
actions = self.model.sample_actions(images, img_masks, lang_tokens, lang_masks, state, noise=noise)
|
||||
|
||||
@@ -397,8 +266,6 @@ class SmolVLAPolicy(PreTrainedPolicy):
|
||||
original_action_dim = self.config.action_feature.shape[0]
|
||||
actions = actions[:, :, :original_action_dim]
|
||||
|
||||
actions = self.unnormalize_outputs({ACTION: actions})[ACTION]
|
||||
|
||||
if self.config.adapt_to_pi_aloha:
|
||||
actions = self._pi_aloha_encode_actions(actions)
|
||||
|
||||
@@ -408,8 +275,6 @@ class SmolVLAPolicy(PreTrainedPolicy):
|
||||
if self.config.adapt_to_pi_aloha:
|
||||
batch[OBS_STATE] = self._pi_aloha_decode_state(batch[OBS_STATE])
|
||||
|
||||
batch = self.normalize_inputs(batch)
|
||||
|
||||
return batch
|
||||
|
||||
@torch.no_grad()
|
||||
@@ -450,11 +315,11 @@ class SmolVLAPolicy(PreTrainedPolicy):
|
||||
if self.config.adapt_to_pi_aloha:
|
||||
batch[OBS_STATE] = self._pi_aloha_decode_state(batch[OBS_STATE])
|
||||
batch[ACTION] = self._pi_aloha_encode_actions_inv(batch[ACTION])
|
||||
batch = self.normalize_inputs(batch)
|
||||
batch = self.normalize_targets(batch)
|
||||
|
||||
images, img_masks = self.prepare_images(batch)
|
||||
state = self.prepare_state(batch)
|
||||
lang_tokens, lang_masks = self.prepare_language(batch)
|
||||
lang_tokens = batch[f"{OBS_LANGUAGE_TOKENS}"]
|
||||
lang_masks = batch[f"{OBS_LANGUAGE_ATTENTION_MASK}"]
|
||||
actions = self.prepare_action(batch)
|
||||
actions_is_pad = batch.get("actions_id_pad")
|
||||
loss_dict = {}
|
||||
@@ -518,30 +383,6 @@ class SmolVLAPolicy(PreTrainedPolicy):
|
||||
img_masks.append(mask)
|
||||
return images, img_masks
|
||||
|
||||
def prepare_language(self, batch) -> tuple[Tensor, Tensor]:
|
||||
"""Tokenize the text input"""
|
||||
device = batch[OBS_STATE].device
|
||||
tasks = batch["task"]
|
||||
if isinstance(tasks, str):
|
||||
tasks = [tasks]
|
||||
|
||||
if len(tasks) == 1:
|
||||
tasks = [tasks[0] for _ in range(batch[OBS_STATE].shape[0])]
|
||||
|
||||
tasks = [task if task.endswith("\n") else f"{task}\n" for task in tasks]
|
||||
|
||||
tokenized_prompt = self.language_tokenizer.__call__(
|
||||
tasks,
|
||||
padding=self.config.pad_language_to,
|
||||
padding_side="right",
|
||||
max_length=self.config.tokenizer_max_length,
|
||||
return_tensors="pt",
|
||||
)
|
||||
lang_tokens = tokenized_prompt["input_ids"].to(device=device)
|
||||
lang_masks = tokenized_prompt["attention_mask"].to(device=device, dtype=torch.bool)
|
||||
|
||||
return lang_tokens, lang_masks
|
||||
|
||||
def _pi_aloha_decode_state(self, state):
|
||||
# Flip the joints.
|
||||
for motor_idx in [1, 2, 8, 9]:
|
||||
|
||||
@@ -0,0 +1,141 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from typing import Any
|
||||
|
||||
import torch
|
||||
|
||||
from lerobot.configs.types import PipelineFeatureType, PolicyFeature
|
||||
from lerobot.constants import POLICY_POSTPROCESSOR_DEFAULT_NAME, POLICY_PREPROCESSOR_DEFAULT_NAME
|
||||
from lerobot.policies.smolvla.configuration_smolvla import SmolVLAConfig
|
||||
from lerobot.processor import (
|
||||
AddBatchDimensionProcessorStep,
|
||||
ComplementaryDataProcessorStep,
|
||||
DeviceProcessorStep,
|
||||
NormalizerProcessorStep,
|
||||
PolicyAction,
|
||||
PolicyProcessorPipeline,
|
||||
ProcessorStepRegistry,
|
||||
RenameObservationsProcessorStep,
|
||||
TokenizerProcessorStep,
|
||||
UnnormalizerProcessorStep,
|
||||
)
|
||||
from lerobot.processor.converters import policy_action_to_transition, transition_to_policy_action
|
||||
|
||||
|
||||
def make_smolvla_pre_post_processors(
|
||||
config: SmolVLAConfig,
|
||||
dataset_stats: dict[str, dict[str, torch.Tensor]] | None = None,
|
||||
) -> tuple[
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]],
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction],
|
||||
]:
|
||||
"""
|
||||
Constructs pre-processor and post-processor pipelines for the SmolVLA policy.
|
||||
|
||||
The pre-processing pipeline prepares input data for the model by:
|
||||
1. Renaming features to match pretrained configurations.
|
||||
2. Normalizing input and output features based on dataset statistics.
|
||||
3. Adding a batch dimension.
|
||||
4. Ensuring the language task description ends with a newline character.
|
||||
5. Tokenizing the language task description.
|
||||
6. Moving all data to the specified device.
|
||||
|
||||
The post-processing pipeline handles the model's output by:
|
||||
1. Moving data to the CPU.
|
||||
2. Unnormalizing the output actions to their original scale.
|
||||
|
||||
Args:
|
||||
config: The configuration object for the SmolVLA policy.
|
||||
dataset_stats: A dictionary of statistics for normalization.
|
||||
|
||||
Returns:
|
||||
A tuple containing the configured pre-processor and post-processor pipelines.
|
||||
"""
|
||||
|
||||
input_steps = [
|
||||
RenameObservationsProcessorStep(rename_map={}), # To mimic the same processor as pretrained one
|
||||
AddBatchDimensionProcessorStep(),
|
||||
SmolVLANewLineProcessor(),
|
||||
TokenizerProcessorStep(
|
||||
tokenizer_name=config.vlm_model_name,
|
||||
padding=config.pad_language_to,
|
||||
padding_side="right",
|
||||
max_length=config.tokenizer_max_length,
|
||||
),
|
||||
DeviceProcessorStep(device=config.device),
|
||||
NormalizerProcessorStep(
|
||||
features={**config.input_features, **config.output_features},
|
||||
norm_map=config.normalization_mapping,
|
||||
stats=dataset_stats,
|
||||
),
|
||||
]
|
||||
output_steps = [
|
||||
UnnormalizerProcessorStep(
|
||||
features=config.output_features, norm_map=config.normalization_mapping, stats=dataset_stats
|
||||
),
|
||||
DeviceProcessorStep(device="cpu"),
|
||||
]
|
||||
return (
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]](
|
||||
steps=input_steps,
|
||||
name=POLICY_PREPROCESSOR_DEFAULT_NAME,
|
||||
),
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction](
|
||||
steps=output_steps,
|
||||
name=POLICY_POSTPROCESSOR_DEFAULT_NAME,
|
||||
to_transition=policy_action_to_transition,
|
||||
to_output=transition_to_policy_action,
|
||||
),
|
||||
)
|
||||
|
||||
|
||||
@ProcessorStepRegistry.register(name="smolvla_new_line_processor")
|
||||
class SmolVLANewLineProcessor(ComplementaryDataProcessorStep):
|
||||
"""
|
||||
A processor step that ensures the 'task' description ends with a newline character.
|
||||
|
||||
This step is necessary for certain tokenizers (e.g., PaliGemma) that expect a
|
||||
newline at the end of the prompt. It handles both single string tasks and lists
|
||||
of string tasks.
|
||||
"""
|
||||
|
||||
def complementary_data(self, complementary_data):
|
||||
if "task" not in complementary_data:
|
||||
return complementary_data
|
||||
|
||||
task = complementary_data["task"]
|
||||
if task is None:
|
||||
return complementary_data
|
||||
|
||||
new_complementary_data = dict(complementary_data)
|
||||
|
||||
# Handle both string and list of strings
|
||||
if isinstance(task, str):
|
||||
# Single string: add newline if not present
|
||||
if not task.endswith("\n"):
|
||||
new_complementary_data["task"] = f"{task}\n"
|
||||
elif isinstance(task, list) and all(isinstance(t, str) for t in task):
|
||||
# List of strings: add newline to each if not present
|
||||
new_complementary_data["task"] = [t if t.endswith("\n") else f"{t}\n" for t in task]
|
||||
# If task is neither string nor list of strings, leave unchanged
|
||||
|
||||
return new_complementary_data
|
||||
|
||||
def transform_features(
|
||||
self, features: dict[PipelineFeatureType, dict[str, PolicyFeature]]
|
||||
) -> dict[PipelineFeatureType, dict[str, PolicyFeature]]:
|
||||
return features
|
||||
@@ -36,7 +36,6 @@ import torch.nn.functional as F # noqa: N812
|
||||
from torch import Tensor
|
||||
|
||||
from lerobot.constants import ACTION, OBS_ENV_STATE, OBS_IMAGE, OBS_STATE, REWARD
|
||||
from lerobot.policies.normalize import Normalize, Unnormalize
|
||||
from lerobot.policies.pretrained import PreTrainedPolicy
|
||||
from lerobot.policies.tdmpc.configuration_tdmpc import TDMPCConfig
|
||||
from lerobot.policies.utils import get_device_from_parameters, get_output_shape, populate_queues
|
||||
@@ -63,26 +62,19 @@ class TDMPCPolicy(PreTrainedPolicy):
|
||||
config_class = TDMPCConfig
|
||||
name = "tdmpc"
|
||||
|
||||
def __init__(self, config: TDMPCConfig, dataset_stats: dict[str, dict[str, Tensor]] | None = None):
|
||||
def __init__(
|
||||
self,
|
||||
config: TDMPCConfig,
|
||||
):
|
||||
"""
|
||||
Args:
|
||||
config: Policy configuration class instance or None, in which case the default instantiation of
|
||||
the configuration class is used.
|
||||
dataset_stats: Dataset statistics to be used for normalization. If not passed here, it is expected
|
||||
that they will be passed with a call to `load_state_dict` before the policy is used.
|
||||
"""
|
||||
super().__init__(config)
|
||||
config.validate_features()
|
||||
self.config = config
|
||||
|
||||
self.normalize_inputs = Normalize(config.input_features, config.normalization_mapping, dataset_stats)
|
||||
self.normalize_targets = Normalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
self.unnormalize_outputs = Unnormalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
|
||||
self.model = TDMPCTOLD(config)
|
||||
self.model_target = deepcopy(self.model)
|
||||
for param in self.model_target.parameters():
|
||||
@@ -137,7 +129,6 @@ class TDMPCPolicy(PreTrainedPolicy):
|
||||
|
||||
actions = torch.clamp(actions, -1, +1)
|
||||
|
||||
actions = self.unnormalize_outputs({ACTION: actions})[ACTION]
|
||||
return actions
|
||||
|
||||
@torch.no_grad()
|
||||
@@ -147,11 +138,12 @@ class TDMPCPolicy(PreTrainedPolicy):
|
||||
if ACTION in batch:
|
||||
batch.pop(ACTION)
|
||||
|
||||
batch = self.normalize_inputs(batch)
|
||||
|
||||
if self.config.image_features:
|
||||
batch = dict(batch) # shallow copy so that adding a key doesn't modify the original
|
||||
batch[OBS_IMAGE] = batch[next(iter(self.config.image_features))]
|
||||
# NOTE: for offline evaluation, we have action in the batch, so we need to pop it out
|
||||
if ACTION in batch:
|
||||
batch.pop(ACTION)
|
||||
|
||||
self._queues = populate_queues(self._queues, batch)
|
||||
|
||||
@@ -320,11 +312,9 @@ class TDMPCPolicy(PreTrainedPolicy):
|
||||
"""
|
||||
device = get_device_from_parameters(self)
|
||||
|
||||
batch = self.normalize_inputs(batch)
|
||||
if self.config.image_features:
|
||||
batch = dict(batch) # shallow copy so that adding a key doesn't modify the original
|
||||
batch[OBS_IMAGE] = batch[next(iter(self.config.image_features))]
|
||||
batch = self.normalize_targets(batch)
|
||||
|
||||
info = {}
|
||||
|
||||
|
||||
@@ -0,0 +1,90 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2024 Nicklas Hansen, Xiaolong Wang, Hao Su,
|
||||
# and The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
from typing import Any
|
||||
|
||||
import torch
|
||||
|
||||
from lerobot.constants import POLICY_POSTPROCESSOR_DEFAULT_NAME, POLICY_PREPROCESSOR_DEFAULT_NAME
|
||||
from lerobot.policies.tdmpc.configuration_tdmpc import TDMPCConfig
|
||||
from lerobot.processor import (
|
||||
AddBatchDimensionProcessorStep,
|
||||
DeviceProcessorStep,
|
||||
NormalizerProcessorStep,
|
||||
PolicyAction,
|
||||
PolicyProcessorPipeline,
|
||||
RenameObservationsProcessorStep,
|
||||
UnnormalizerProcessorStep,
|
||||
)
|
||||
from lerobot.processor.converters import policy_action_to_transition, transition_to_policy_action
|
||||
|
||||
|
||||
def make_tdmpc_pre_post_processors(
|
||||
config: TDMPCConfig,
|
||||
dataset_stats: dict[str, dict[str, torch.Tensor]] | None = None,
|
||||
) -> tuple[
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]],
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction],
|
||||
]:
|
||||
"""
|
||||
Constructs pre-processor and post-processor pipelines for the TDMPC policy.
|
||||
|
||||
The pre-processing pipeline prepares input data for the model by:
|
||||
1. Renaming features to match pretrained configurations.
|
||||
2. Normalizing input and output features based on dataset statistics.
|
||||
3. Adding a batch dimension.
|
||||
4. Moving all data to the specified device.
|
||||
|
||||
The post-processing pipeline handles the model's output by:
|
||||
1. Moving data to the CPU.
|
||||
2. Unnormalizing the output features to their original scale.
|
||||
|
||||
Args:
|
||||
config: The configuration object for the TDMPC policy.
|
||||
dataset_stats: A dictionary of statistics for normalization.
|
||||
|
||||
Returns:
|
||||
A tuple containing the configured pre-processor and post-processor pipelines.
|
||||
"""
|
||||
|
||||
input_steps = [
|
||||
RenameObservationsProcessorStep(rename_map={}),
|
||||
AddBatchDimensionProcessorStep(),
|
||||
DeviceProcessorStep(device=config.device),
|
||||
NormalizerProcessorStep(
|
||||
features={**config.input_features, **config.output_features},
|
||||
norm_map=config.normalization_mapping,
|
||||
stats=dataset_stats,
|
||||
),
|
||||
]
|
||||
output_steps = [
|
||||
UnnormalizerProcessorStep(
|
||||
features=config.output_features, norm_map=config.normalization_mapping, stats=dataset_stats
|
||||
),
|
||||
DeviceProcessorStep(device="cpu"),
|
||||
]
|
||||
return (
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]](
|
||||
steps=input_steps,
|
||||
name=POLICY_PREPROCESSOR_DEFAULT_NAME,
|
||||
),
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction](
|
||||
steps=output_steps,
|
||||
name=POLICY_POSTPROCESSOR_DEFAULT_NAME,
|
||||
to_transition=policy_action_to_transition,
|
||||
to_output=transition_to_policy_action,
|
||||
),
|
||||
)
|
||||
@@ -28,7 +28,6 @@ import torchvision
|
||||
from torch import Tensor, nn
|
||||
|
||||
from lerobot.constants import ACTION, OBS_IMAGES, OBS_STATE
|
||||
from lerobot.policies.normalize import Normalize, Unnormalize
|
||||
from lerobot.policies.pretrained import PreTrainedPolicy
|
||||
from lerobot.policies.utils import get_device_from_parameters, get_output_shape, populate_queues
|
||||
from lerobot.policies.vqbet.configuration_vqbet import VQBeTConfig
|
||||
@@ -48,7 +47,6 @@ class VQBeTPolicy(PreTrainedPolicy):
|
||||
def __init__(
|
||||
self,
|
||||
config: VQBeTConfig | None = None,
|
||||
dataset_stats: dict[str, dict[str, Tensor]] | None = None,
|
||||
):
|
||||
"""
|
||||
Args:
|
||||
@@ -61,14 +59,6 @@ class VQBeTPolicy(PreTrainedPolicy):
|
||||
config.validate_features()
|
||||
self.config = config
|
||||
|
||||
self.normalize_inputs = Normalize(config.input_features, config.normalization_mapping, dataset_stats)
|
||||
self.normalize_targets = Normalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
self.unnormalize_outputs = Unnormalize(
|
||||
config.output_features, config.normalization_mapping, dataset_stats
|
||||
)
|
||||
|
||||
self.vqbet = VQBeTModel(config)
|
||||
|
||||
self.reset()
|
||||
@@ -128,7 +118,6 @@ class VQBeTPolicy(PreTrainedPolicy):
|
||||
def predict_action_chunk(self, batch: dict[str, Tensor]) -> Tensor:
|
||||
batch = {k: torch.stack(list(self._queues[k]), dim=1) for k in batch if k in self._queues}
|
||||
actions = self.vqbet(batch, rollout=True)[:, : self.config.action_chunk_size]
|
||||
actions = self.unnormalize_outputs({ACTION: actions})[ACTION]
|
||||
return actions
|
||||
|
||||
@torch.no_grad()
|
||||
@@ -142,10 +131,12 @@ class VQBeTPolicy(PreTrainedPolicy):
|
||||
# NOTE: for offline evaluation, we have action in the batch, so we need to pop it out
|
||||
if ACTION in batch:
|
||||
batch.pop(ACTION)
|
||||
batch = self.normalize_inputs(batch)
|
||||
batch = dict(batch) # shallow copy so that adding a key doesn't modify the original
|
||||
# NOTE: It's important that this happens after stacking the images into a single key.
|
||||
batch["observation.images"] = torch.stack([batch[key] for key in self.config.image_features], dim=-4)
|
||||
# NOTE: for offline evaluation, we have action in the batch, so we need to pop it out
|
||||
if ACTION in batch:
|
||||
batch.pop(ACTION)
|
||||
|
||||
self._queues = populate_queues(self._queues, batch)
|
||||
|
||||
@@ -165,10 +156,8 @@ class VQBeTPolicy(PreTrainedPolicy):
|
||||
|
||||
def forward(self, batch: dict[str, Tensor]) -> tuple[Tensor, dict]:
|
||||
"""Run the batch through the model and compute the loss for training or validation."""
|
||||
batch = self.normalize_inputs(batch)
|
||||
batch = dict(batch) # shallow copy so that adding a key doesn't modify the original
|
||||
batch[OBS_IMAGES] = torch.stack([batch[key] for key in self.config.image_features], dim=-4)
|
||||
batch = self.normalize_targets(batch)
|
||||
# VQ-BeT discretizes action using VQ-VAE before training BeT (please refer to section 3.2 in the VQ-BeT paper https://huggingface.co/papers/2403.03181)
|
||||
if not self.vqbet.action_head.vqvae_model.discretized.item():
|
||||
# loss: total loss of training RVQ
|
||||
|
||||
@@ -0,0 +1,91 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2024 Seungjae Lee and Yibin Wang and Haritheja Etukuru
|
||||
# and H. Jin Kim and Nur Muhammad Mahi Shafiullah and Lerrel Pinto
|
||||
# and The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
from typing import Any
|
||||
|
||||
import torch
|
||||
|
||||
from lerobot.constants import POLICY_POSTPROCESSOR_DEFAULT_NAME, POLICY_PREPROCESSOR_DEFAULT_NAME
|
||||
from lerobot.policies.vqbet.configuration_vqbet import VQBeTConfig
|
||||
from lerobot.processor import (
|
||||
AddBatchDimensionProcessorStep,
|
||||
DeviceProcessorStep,
|
||||
NormalizerProcessorStep,
|
||||
PolicyAction,
|
||||
PolicyProcessorPipeline,
|
||||
RenameObservationsProcessorStep,
|
||||
UnnormalizerProcessorStep,
|
||||
)
|
||||
from lerobot.processor.converters import policy_action_to_transition, transition_to_policy_action
|
||||
|
||||
|
||||
def make_vqbet_pre_post_processors(
|
||||
config: VQBeTConfig,
|
||||
dataset_stats: dict[str, dict[str, torch.Tensor]] | None = None,
|
||||
) -> tuple[
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]],
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction],
|
||||
]:
|
||||
"""
|
||||
Constructs pre-processor and post-processor pipelines for the VQ-BeT policy.
|
||||
|
||||
The pre-processing pipeline prepares input data for the model by:
|
||||
1. Renaming features, allowing customization to match pretrained configurations.
|
||||
2. Normalizing input and output features based on dataset statistics.
|
||||
3. Adding a batch dimension.
|
||||
4. Moving all data to the specified device.
|
||||
|
||||
The post-processing pipeline handles the model's output by:
|
||||
1. Moving data to the CPU.
|
||||
2. Unnormalizing the output features to their original scale.
|
||||
|
||||
Args:
|
||||
config: The configuration object for the VQ-BeT policy.
|
||||
dataset_stats: A dictionary of statistics for normalization.
|
||||
|
||||
Returns:
|
||||
A tuple containing the configured pre-processor and post-processor pipelines.
|
||||
"""
|
||||
|
||||
input_steps = [
|
||||
RenameObservationsProcessorStep(rename_map={}), # Let the possibility to the user to rename the keys
|
||||
AddBatchDimensionProcessorStep(),
|
||||
DeviceProcessorStep(device=config.device),
|
||||
NormalizerProcessorStep(
|
||||
features={**config.input_features, **config.output_features},
|
||||
norm_map=config.normalization_mapping,
|
||||
stats=dataset_stats,
|
||||
),
|
||||
]
|
||||
output_steps = [
|
||||
UnnormalizerProcessorStep(
|
||||
features=config.output_features, norm_map=config.normalization_mapping, stats=dataset_stats
|
||||
),
|
||||
DeviceProcessorStep(device="cpu"),
|
||||
]
|
||||
return (
|
||||
PolicyProcessorPipeline[dict[str, Any], dict[str, Any]](
|
||||
steps=input_steps,
|
||||
name=POLICY_PREPROCESSOR_DEFAULT_NAME,
|
||||
),
|
||||
PolicyProcessorPipeline[PolicyAction, PolicyAction](
|
||||
steps=output_steps,
|
||||
name=POLICY_POSTPROCESSOR_DEFAULT_NAME,
|
||||
to_transition=policy_action_to_transition,
|
||||
to_output=transition_to_policy_action,
|
||||
),
|
||||
)
|
||||
@@ -14,41 +14,120 @@
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from .device_processor import DeviceProcessor
|
||||
from .normalize_processor import NormalizerProcessor, UnnormalizerProcessor
|
||||
from .observation_processor import VanillaObservationProcessor
|
||||
from .pipeline import (
|
||||
ActionProcessor,
|
||||
DoneProcessor,
|
||||
from .batch_processor import AddBatchDimensionProcessorStep
|
||||
from .converters import (
|
||||
batch_to_transition,
|
||||
create_transition,
|
||||
transition_to_batch,
|
||||
)
|
||||
from .core import (
|
||||
EnvAction,
|
||||
EnvTransition,
|
||||
IdentityProcessor,
|
||||
InfoProcessor,
|
||||
ObservationProcessor,
|
||||
PolicyAction,
|
||||
RobotAction,
|
||||
RobotObservation,
|
||||
TransitionKey,
|
||||
)
|
||||
from .delta_action_processor import MapDeltaActionToRobotActionStep, MapTensorToDeltaActionDictStep
|
||||
from .device_processor import DeviceProcessorStep
|
||||
from .factory import (
|
||||
make_default_processors,
|
||||
make_default_robot_action_processor,
|
||||
make_default_robot_observation_processor,
|
||||
make_default_teleop_action_processor,
|
||||
)
|
||||
from .gym_action_processor import (
|
||||
Numpy2TorchActionProcessorStep,
|
||||
Torch2NumpyActionProcessorStep,
|
||||
)
|
||||
from .hil_processor import (
|
||||
AddTeleopActionAsComplimentaryDataStep,
|
||||
AddTeleopEventsAsInfoStep,
|
||||
GripperPenaltyProcessorStep,
|
||||
ImageCropResizeProcessorStep,
|
||||
InterventionActionProcessorStep,
|
||||
RewardClassifierProcessorStep,
|
||||
TimeLimitProcessorStep,
|
||||
)
|
||||
from .joint_observations_processor import JointVelocityProcessorStep, MotorCurrentProcessorStep
|
||||
from .normalize_processor import NormalizerProcessorStep, UnnormalizerProcessorStep, hotswap_stats
|
||||
from .observation_processor import VanillaObservationProcessorStep
|
||||
from .pipeline import (
|
||||
ActionProcessorStep,
|
||||
ComplementaryDataProcessorStep,
|
||||
DataProcessorPipeline,
|
||||
DoneProcessorStep,
|
||||
IdentityProcessorStep,
|
||||
InfoProcessorStep,
|
||||
ObservationProcessorStep,
|
||||
PolicyActionProcessorStep,
|
||||
PolicyProcessorPipeline,
|
||||
ProcessorKwargs,
|
||||
ProcessorStep,
|
||||
ProcessorStepRegistry,
|
||||
RewardProcessor,
|
||||
RobotProcessor,
|
||||
TransitionKey,
|
||||
TruncatedProcessor,
|
||||
RewardProcessorStep,
|
||||
RobotActionProcessorStep,
|
||||
RobotProcessorPipeline,
|
||||
TruncatedProcessorStep,
|
||||
)
|
||||
from .rename_processor import RenameProcessor
|
||||
from .policy_robot_bridge import (
|
||||
PolicyActionToRobotActionProcessorStep,
|
||||
RobotActionToPolicyActionProcessorStep,
|
||||
)
|
||||
from .rename_processor import RenameObservationsProcessorStep
|
||||
from .tokenizer_processor import TokenizerProcessorStep
|
||||
|
||||
__all__ = [
|
||||
"ActionProcessor",
|
||||
"DeviceProcessor",
|
||||
"DoneProcessor",
|
||||
"ActionProcessorStep",
|
||||
"AddTeleopActionAsComplimentaryDataStep",
|
||||
"AddTeleopEventsAsInfoStep",
|
||||
"ComplementaryDataProcessorStep",
|
||||
"batch_to_transition",
|
||||
"create_transition",
|
||||
"DeviceProcessorStep",
|
||||
"DoneProcessorStep",
|
||||
"EnvAction",
|
||||
"EnvTransition",
|
||||
"IdentityProcessor",
|
||||
"InfoProcessor",
|
||||
"NormalizerProcessor",
|
||||
"UnnormalizerProcessor",
|
||||
"ObservationProcessor",
|
||||
"GripperPenaltyProcessorStep",
|
||||
"hotswap_stats",
|
||||
"IdentityProcessorStep",
|
||||
"ImageCropResizeProcessorStep",
|
||||
"InfoProcessorStep",
|
||||
"InterventionActionProcessorStep",
|
||||
"JointVelocityProcessorStep",
|
||||
"make_default_processors",
|
||||
"make_default_teleop_action_processor",
|
||||
"make_default_robot_action_processor",
|
||||
"make_default_robot_observation_processor",
|
||||
"MapDeltaActionToRobotActionStep",
|
||||
"MapTensorToDeltaActionDictStep",
|
||||
"MotorCurrentProcessorStep",
|
||||
"NormalizerProcessorStep",
|
||||
"Numpy2TorchActionProcessorStep",
|
||||
"ObservationProcessorStep",
|
||||
"PolicyAction",
|
||||
"PolicyActionProcessorStep",
|
||||
"PolicyProcessorPipeline",
|
||||
"ProcessorKwargs",
|
||||
"ProcessorStep",
|
||||
"ProcessorStepRegistry",
|
||||
"RenameProcessor",
|
||||
"RewardProcessor",
|
||||
"RobotProcessor",
|
||||
"RobotAction",
|
||||
"RobotActionProcessorStep",
|
||||
"RobotObservation",
|
||||
"RenameObservationsProcessorStep",
|
||||
"RewardClassifierProcessorStep",
|
||||
"RewardProcessorStep",
|
||||
"DataProcessorPipeline",
|
||||
"TimeLimitProcessorStep",
|
||||
"AddBatchDimensionProcessorStep",
|
||||
"RobotProcessorPipeline",
|
||||
"TokenizerProcessorStep",
|
||||
"Torch2NumpyActionProcessorStep",
|
||||
"RobotActionToPolicyActionProcessorStep",
|
||||
"PolicyActionToRobotActionProcessorStep",
|
||||
"transition_to_batch",
|
||||
"TransitionKey",
|
||||
"TruncatedProcessor",
|
||||
"VanillaObservationProcessor",
|
||||
"TruncatedProcessorStep",
|
||||
"UnnormalizerProcessorStep",
|
||||
"VanillaObservationProcessorStep",
|
||||
]
|
||||
|
||||
@@ -0,0 +1,254 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
"""
|
||||
This script defines processor steps for adding a batch dimension to various components of an environment transition.
|
||||
|
||||
These steps are designed to process actions, observations, and complementary data, making them suitable for batch processing by adding a leading dimension. This is a common requirement before feeding data into a neural network model.
|
||||
"""
|
||||
|
||||
from dataclasses import dataclass, field
|
||||
|
||||
from torch import Tensor
|
||||
|
||||
from lerobot.configs.types import PipelineFeatureType, PolicyFeature
|
||||
from lerobot.constants import OBS_ENV_STATE, OBS_IMAGE, OBS_IMAGES, OBS_STATE
|
||||
|
||||
from .core import EnvTransition, PolicyAction
|
||||
from .pipeline import (
|
||||
ComplementaryDataProcessorStep,
|
||||
ObservationProcessorStep,
|
||||
PolicyActionProcessorStep,
|
||||
ProcessorStep,
|
||||
ProcessorStepRegistry,
|
||||
TransitionKey,
|
||||
)
|
||||
|
||||
|
||||
@dataclass
|
||||
@ProcessorStepRegistry.register(name="to_batch_processor_action")
|
||||
class AddBatchDimensionActionStep(PolicyActionProcessorStep):
|
||||
"""
|
||||
Processor step to add a batch dimension to a 1D tensor action.
|
||||
|
||||
This is useful for creating a batch of size 1 from a single action sample.
|
||||
"""
|
||||
|
||||
def action(self, action: PolicyAction) -> PolicyAction:
|
||||
"""
|
||||
Adds a batch dimension to the action if it's a 1D tensor.
|
||||
|
||||
Args:
|
||||
action: The action tensor.
|
||||
|
||||
Returns:
|
||||
The action tensor with an added batch dimension.
|
||||
"""
|
||||
if action.dim() != 1:
|
||||
return action
|
||||
return action.unsqueeze(0)
|
||||
|
||||
def transform_features(
|
||||
self, features: dict[PipelineFeatureType, dict[str, PolicyFeature]]
|
||||
) -> dict[PipelineFeatureType, dict[str, PolicyFeature]]:
|
||||
"""
|
||||
Returns the input features unchanged.
|
||||
|
||||
Adding a batch dimension does not alter the feature definition.
|
||||
|
||||
Args:
|
||||
features: A dictionary of policy features.
|
||||
|
||||
Returns:
|
||||
The original dictionary of policy features.
|
||||
"""
|
||||
return features
|
||||
|
||||
|
||||
@dataclass
|
||||
@ProcessorStepRegistry.register(name="to_batch_processor_observation")
|
||||
class AddBatchDimensionObservationStep(ObservationProcessorStep):
|
||||
"""
|
||||
Processor step to add a batch dimension to observations.
|
||||
|
||||
It handles different types of observations:
|
||||
- State vectors (1D tensors).
|
||||
- Single images (3D tensors).
|
||||
- Dictionaries of multiple images (3D tensors).
|
||||
"""
|
||||
|
||||
def observation(self, observation: dict[str, Tensor]) -> dict[str, Tensor]:
|
||||
"""
|
||||
Adds a batch dimension to tensor-based observations in the observation dictionary.
|
||||
|
||||
Args:
|
||||
observation: The observation dictionary.
|
||||
|
||||
Returns:
|
||||
The observation dictionary with batch dimensions added to tensors.
|
||||
"""
|
||||
# Process state observations - add batch dim if 1D
|
||||
for state_key in [OBS_STATE, OBS_ENV_STATE]:
|
||||
if state_key in observation:
|
||||
state_value = observation[state_key]
|
||||
if isinstance(state_value, Tensor) and state_value.dim() == 1:
|
||||
observation[state_key] = state_value.unsqueeze(0)
|
||||
|
||||
# Process single image observation - add batch dim if 3D
|
||||
if OBS_IMAGE in observation:
|
||||
image_value = observation[OBS_IMAGE]
|
||||
if isinstance(image_value, Tensor) and image_value.dim() == 3:
|
||||
observation[OBS_IMAGE] = image_value.unsqueeze(0)
|
||||
|
||||
# Process multiple image observations - add batch dim if 3D
|
||||
for key, value in observation.items():
|
||||
if key.startswith(f"{OBS_IMAGES}.") and isinstance(value, Tensor) and value.dim() == 3:
|
||||
observation[key] = value.unsqueeze(0)
|
||||
return observation
|
||||
|
||||
def transform_features(
|
||||
self, features: dict[PipelineFeatureType, dict[str, PolicyFeature]]
|
||||
) -> dict[PipelineFeatureType, dict[str, PolicyFeature]]:
|
||||
"""
|
||||
Returns the input features unchanged.
|
||||
|
||||
Adding a batch dimension does not alter the feature definition.
|
||||
|
||||
Args:
|
||||
features: A dictionary of policy features.
|
||||
|
||||
Returns:
|
||||
The original dictionary of policy features.
|
||||
"""
|
||||
return features
|
||||
|
||||
|
||||
@dataclass
|
||||
@ProcessorStepRegistry.register(name="to_batch_processor_complementary_data")
|
||||
class AddBatchDimensionComplementaryDataStep(ComplementaryDataProcessorStep):
|
||||
"""
|
||||
Processor step to add a batch dimension to complementary data fields.
|
||||
|
||||
Handles specific keys like 'task', 'index', and 'task_index' to make them batched.
|
||||
- 'task' (str) is wrapped in a list.
|
||||
- 'index' and 'task_index' (0D tensors) get a batch dimension.
|
||||
"""
|
||||
|
||||
def complementary_data(self, complementary_data: dict) -> dict:
|
||||
"""
|
||||
Adds a batch dimension to specific fields in the complementary data dictionary.
|
||||
|
||||
Args:
|
||||
complementary_data: The complementary data dictionary.
|
||||
|
||||
Returns:
|
||||
The complementary data dictionary with batch dimensions added.
|
||||
"""
|
||||
# Process task field - wrap string in list to add batch dimension
|
||||
if "task" in complementary_data:
|
||||
task_value = complementary_data["task"]
|
||||
if isinstance(task_value, str):
|
||||
complementary_data["task"] = [task_value]
|
||||
|
||||
# Process index field - add batch dim if 0D
|
||||
if "index" in complementary_data:
|
||||
index_value = complementary_data["index"]
|
||||
if isinstance(index_value, Tensor) and index_value.dim() == 0:
|
||||
complementary_data["index"] = index_value.unsqueeze(0)
|
||||
|
||||
# Process task_index field - add batch dim if 0D
|
||||
if "task_index" in complementary_data:
|
||||
task_index_value = complementary_data["task_index"]
|
||||
if isinstance(task_index_value, Tensor) and task_index_value.dim() == 0:
|
||||
complementary_data["task_index"] = task_index_value.unsqueeze(0)
|
||||
return complementary_data
|
||||
|
||||
def transform_features(
|
||||
self, features: dict[PipelineFeatureType, dict[str, PolicyFeature]]
|
||||
) -> dict[PipelineFeatureType, dict[str, PolicyFeature]]:
|
||||
"""
|
||||
Returns the input features unchanged.
|
||||
|
||||
Adding a batch dimension does not alter the feature definition.
|
||||
|
||||
Args:
|
||||
features: A dictionary of policy features.
|
||||
|
||||
Returns:
|
||||
The original dictionary of policy features.
|
||||
"""
|
||||
return features
|
||||
|
||||
|
||||
@dataclass
|
||||
@ProcessorStepRegistry.register(name="to_batch_processor")
|
||||
class AddBatchDimensionProcessorStep(ProcessorStep):
|
||||
"""
|
||||
A composite processor step that adds a batch dimension to the entire environment transition.
|
||||
|
||||
This step combines individual processors for actions, observations, and complementary data
|
||||
to create a batched transition (batch size 1) from a single-instance transition.
|
||||
|
||||
Attributes:
|
||||
to_batch_action_processor: Processor for the action component.
|
||||
to_batch_observation_processor: Processor for the observation component.
|
||||
to_batch_complementary_data_processor: Processor for the complementary data component.
|
||||
"""
|
||||
|
||||
to_batch_action_processor: AddBatchDimensionActionStep = field(
|
||||
default_factory=AddBatchDimensionActionStep
|
||||
)
|
||||
to_batch_observation_processor: AddBatchDimensionObservationStep = field(
|
||||
default_factory=AddBatchDimensionObservationStep
|
||||
)
|
||||
to_batch_complementary_data_processor: AddBatchDimensionComplementaryDataStep = field(
|
||||
default_factory=AddBatchDimensionComplementaryDataStep
|
||||
)
|
||||
|
||||
def __call__(self, transition: EnvTransition) -> EnvTransition:
|
||||
"""
|
||||
Applies the batching process to all relevant parts of an environment transition.
|
||||
|
||||
Args:
|
||||
transition: The environment transition to process.
|
||||
|
||||
Returns:
|
||||
The environment transition with a batch dimension added.
|
||||
"""
|
||||
if transition[TransitionKey.ACTION] is not None:
|
||||
transition = self.to_batch_action_processor(transition)
|
||||
if transition[TransitionKey.OBSERVATION] is not None:
|
||||
transition = self.to_batch_observation_processor(transition)
|
||||
if transition[TransitionKey.COMPLEMENTARY_DATA] is not None:
|
||||
transition = self.to_batch_complementary_data_processor(transition)
|
||||
return transition
|
||||
|
||||
def transform_features(
|
||||
self, features: dict[PipelineFeatureType, dict[str, PolicyFeature]]
|
||||
) -> dict[PipelineFeatureType, dict[str, PolicyFeature]]:
|
||||
"""
|
||||
Returns the input features unchanged.
|
||||
|
||||
Adding a batch dimension does not alter the feature definition.
|
||||
|
||||
Args:
|
||||
features: A dictionary of policy features.
|
||||
|
||||
Returns:
|
||||
The original dictionary of policy features.
|
||||
"""
|
||||
# NOTE: We ignore the batch dimension when transforming features
|
||||
return features
|
||||
@@ -0,0 +1,412 @@
|
||||
# !/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from __future__ import annotations
|
||||
|
||||
from collections.abc import Sequence
|
||||
from functools import singledispatch
|
||||
from typing import Any
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
|
||||
from .core import EnvTransition, PolicyAction, RobotAction, RobotObservation, TransitionKey
|
||||
|
||||
|
||||
@singledispatch
|
||||
def to_tensor(
|
||||
value: Any,
|
||||
*,
|
||||
dtype: torch.dtype | None = torch.float32,
|
||||
device: torch.device | str | None = None,
|
||||
) -> torch.Tensor:
|
||||
"""
|
||||
Convert various data types to PyTorch tensors with configurable options.
|
||||
|
||||
This is a unified tensor conversion function using single dispatch to handle
|
||||
different input types appropriately.
|
||||
|
||||
Args:
|
||||
value: Input value to convert (tensor, array, scalar, sequence, etc.).
|
||||
dtype: Target tensor dtype. If None, preserves original dtype.
|
||||
device: Target device for the tensor.
|
||||
|
||||
Returns:
|
||||
A PyTorch tensor.
|
||||
|
||||
Raises:
|
||||
TypeError: If the input type is not supported.
|
||||
"""
|
||||
raise TypeError(f"Unsupported type for tensor conversion: {type(value)}")
|
||||
|
||||
|
||||
@to_tensor.register(torch.Tensor)
|
||||
def _(value: torch.Tensor, *, dtype=torch.float32, device=None, **kwargs) -> torch.Tensor:
|
||||
"""Handle conversion for existing PyTorch tensors."""
|
||||
if dtype is not None:
|
||||
value = value.to(dtype=dtype)
|
||||
if device is not None:
|
||||
value = value.to(device=device)
|
||||
return value
|
||||
|
||||
|
||||
@to_tensor.register(np.ndarray)
|
||||
def _(
|
||||
value: np.ndarray,
|
||||
*,
|
||||
dtype=torch.float32,
|
||||
device=None,
|
||||
**kwargs,
|
||||
) -> torch.Tensor:
|
||||
"""Handle conversion for numpy arrays."""
|
||||
# Check for numpy scalars (0-dimensional arrays) and treat them as scalars.
|
||||
if value.ndim == 0:
|
||||
# Numpy scalars should be converted to 0-dimensional tensors.
|
||||
scalar_value = value.item()
|
||||
return torch.tensor(scalar_value, dtype=dtype, device=device)
|
||||
|
||||
# Create tensor from numpy array.
|
||||
tensor = torch.from_numpy(value)
|
||||
|
||||
# Apply dtype and device conversion if specified.
|
||||
if dtype is not None:
|
||||
tensor = tensor.to(dtype=dtype)
|
||||
if device is not None:
|
||||
tensor = tensor.to(device=device)
|
||||
|
||||
return tensor
|
||||
|
||||
|
||||
@to_tensor.register(int)
|
||||
@to_tensor.register(float)
|
||||
@to_tensor.register(np.integer)
|
||||
@to_tensor.register(np.floating)
|
||||
def _(value, *, dtype=torch.float32, device=None, **kwargs) -> torch.Tensor:
|
||||
"""Handle conversion for scalar values including numpy scalars."""
|
||||
return torch.tensor(value, dtype=dtype, device=device)
|
||||
|
||||
|
||||
@to_tensor.register(list)
|
||||
@to_tensor.register(tuple)
|
||||
def _(value: Sequence, *, dtype=torch.float32, device=None, **kwargs) -> torch.Tensor:
|
||||
"""Handle conversion for sequences (lists, tuples)."""
|
||||
return torch.tensor(value, dtype=dtype, device=device)
|
||||
|
||||
|
||||
@to_tensor.register(dict)
|
||||
def _(value: dict, *, device=None, **kwargs) -> dict:
|
||||
"""Handle conversion for dictionaries by recursively converting their values to tensors."""
|
||||
if not value:
|
||||
return {}
|
||||
|
||||
result = {}
|
||||
for key, sub_value in value.items():
|
||||
if sub_value is None:
|
||||
continue
|
||||
|
||||
if isinstance(sub_value, dict):
|
||||
# Recursively process nested dictionaries.
|
||||
result[key] = to_tensor(
|
||||
sub_value,
|
||||
device=device,
|
||||
**kwargs,
|
||||
)
|
||||
continue
|
||||
|
||||
# Convert individual values to tensors.
|
||||
result[key] = to_tensor(
|
||||
sub_value,
|
||||
device=device,
|
||||
**kwargs,
|
||||
)
|
||||
return result
|
||||
|
||||
|
||||
def from_tensor_to_numpy(x: torch.Tensor | Any) -> np.ndarray | float | int | Any:
|
||||
"""
|
||||
Convert a PyTorch tensor to a numpy array or scalar if applicable.
|
||||
|
||||
If the input is not a tensor, it is returned unchanged.
|
||||
|
||||
Args:
|
||||
x: The input, which can be a tensor or any other type.
|
||||
|
||||
Returns:
|
||||
A numpy array, a scalar, or the original input.
|
||||
"""
|
||||
if isinstance(x, torch.Tensor):
|
||||
return x.item() if x.numel() == 1 else x.detach().cpu().numpy()
|
||||
return x
|
||||
|
||||
|
||||
def _extract_complementary_data(batch: dict[str, Any]) -> dict[str, Any]:
|
||||
"""
|
||||
Extract complementary data from a batch dictionary.
|
||||
|
||||
This includes padding flags, task description, and indices.
|
||||
|
||||
Args:
|
||||
batch: The batch dictionary.
|
||||
|
||||
Returns:
|
||||
A dictionary with the extracted complementary data.
|
||||
"""
|
||||
pad_keys = {k: v for k, v in batch.items() if "_is_pad" in k}
|
||||
task_key = {"task": batch["task"]} if "task" in batch else {}
|
||||
index_key = {"index": batch["index"]} if "index" in batch else {}
|
||||
task_index_key = {"task_index": batch["task_index"]} if "task_index" in batch else {}
|
||||
|
||||
return {**pad_keys, **task_key, **index_key, **task_index_key}
|
||||
|
||||
|
||||
def create_transition(
|
||||
observation: dict[str, Any] | None = None,
|
||||
action: PolicyAction | RobotAction | None = None,
|
||||
reward: float = 0.0,
|
||||
done: bool = False,
|
||||
truncated: bool = False,
|
||||
info: dict[str, Any] | None = None,
|
||||
complementary_data: dict[str, Any] | None = None,
|
||||
) -> EnvTransition:
|
||||
"""
|
||||
Create an `EnvTransition` dictionary with sensible defaults.
|
||||
|
||||
Args:
|
||||
observation: Observation dictionary.
|
||||
action: Action dictionary.
|
||||
reward: Scalar reward value.
|
||||
done: Episode termination flag.
|
||||
truncated: Episode truncation flag.
|
||||
info: Additional info dictionary.
|
||||
complementary_data: Complementary data dictionary.
|
||||
|
||||
Returns:
|
||||
A complete `EnvTransition` dictionary.
|
||||
"""
|
||||
return {
|
||||
TransitionKey.OBSERVATION: observation,
|
||||
TransitionKey.ACTION: action,
|
||||
TransitionKey.REWARD: reward,
|
||||
TransitionKey.DONE: done,
|
||||
TransitionKey.TRUNCATED: truncated,
|
||||
TransitionKey.INFO: info if info is not None else {},
|
||||
TransitionKey.COMPLEMENTARY_DATA: complementary_data if complementary_data is not None else {},
|
||||
}
|
||||
|
||||
|
||||
def robot_action_observation_to_transition(
|
||||
action_observation: tuple[RobotAction, RobotObservation],
|
||||
) -> EnvTransition:
|
||||
"""
|
||||
Convert a raw robot action and observation dictionary into a standardized `EnvTransition`.
|
||||
|
||||
Args:
|
||||
action: The raw action dictionary from a teleoperation device or controller.
|
||||
observation: The raw observation dictionary from the environment.
|
||||
|
||||
Returns:
|
||||
An `EnvTransition` containing the formatted observation.
|
||||
"""
|
||||
if not isinstance(action_observation, tuple):
|
||||
raise ValueError("action_observation should be a tuple type with an action and observation")
|
||||
|
||||
action, observation = action_observation
|
||||
|
||||
if action is not None and not isinstance(action, dict):
|
||||
raise ValueError(f"Action should be a RobotAction type got {type(action)}")
|
||||
|
||||
if observation is not None and not isinstance(observation, dict):
|
||||
raise ValueError(f"Observation should be a RobotObservation type got {type(observation)}")
|
||||
|
||||
return create_transition(action=action, observation=observation)
|
||||
|
||||
|
||||
def robot_action_to_transition(action: RobotAction) -> EnvTransition:
|
||||
"""
|
||||
Convert a raw robot action dictionary into a standardized `EnvTransition`.
|
||||
|
||||
Args:
|
||||
action: The raw action dictionary from a teleoperation device or controller.
|
||||
|
||||
Returns:
|
||||
An `EnvTransition` containing the formatted action.
|
||||
"""
|
||||
if not isinstance(action, dict):
|
||||
raise ValueError(f"Action should be a RobotAction type got {type(action)}")
|
||||
return create_transition(action=action)
|
||||
|
||||
|
||||
def observation_to_transition(observation: RobotObservation) -> EnvTransition:
|
||||
"""
|
||||
Convert a raw robot observation dictionary into a standardized `EnvTransition`.
|
||||
|
||||
Args:
|
||||
observation: The raw observation dictionary from the environment.
|
||||
|
||||
Returns:
|
||||
An `EnvTransition` containing the formatted observation.
|
||||
"""
|
||||
if not isinstance(observation, dict):
|
||||
raise ValueError(f"Observation should be a RobotObservation type got {type(observation)}")
|
||||
return create_transition(observation=observation)
|
||||
|
||||
|
||||
def transition_to_robot_action(transition: EnvTransition) -> RobotAction:
|
||||
"""
|
||||
Extract a raw robot action dictionary for a robot from an `EnvTransition`.
|
||||
|
||||
This function searches for keys in the format "action.*.pos" or "action.*.vel"
|
||||
and converts them into a flat dictionary suitable for sending to a robot controller.
|
||||
|
||||
Args:
|
||||
transition: The `EnvTransition` containing the action.
|
||||
|
||||
Returns:
|
||||
A dictionary representing the raw robot action.
|
||||
"""
|
||||
if not isinstance(transition, dict):
|
||||
raise ValueError(f"Transition should be a EnvTransition type (dict) got {type(transition)}")
|
||||
|
||||
action = transition.get(TransitionKey.ACTION)
|
||||
if not isinstance(action, dict):
|
||||
raise ValueError(f"Action should be a RobotAction type (dict) got {type(action)}")
|
||||
return transition.get(TransitionKey.ACTION)
|
||||
|
||||
|
||||
def transition_to_policy_action(transition: EnvTransition) -> PolicyAction:
|
||||
"""
|
||||
Convert an `EnvTransition` to a `PolicyAction`.
|
||||
"""
|
||||
if not isinstance(transition, dict):
|
||||
raise ValueError(f"Transition should be a EnvTransition type (dict) got {type(transition)}")
|
||||
|
||||
action = transition.get(TransitionKey.ACTION)
|
||||
if not isinstance(action, PolicyAction):
|
||||
raise ValueError(f"Action should be a PolicyAction type got {type(action)}")
|
||||
return action
|
||||
|
||||
|
||||
def transition_to_observation(transition: EnvTransition) -> RobotObservation:
|
||||
"""
|
||||
Convert an `EnvTransition` to a `RobotObservation`.
|
||||
"""
|
||||
if not isinstance(transition, dict):
|
||||
raise ValueError(f"Transition should be a EnvTransition type (dict) got {type(transition)}")
|
||||
|
||||
observation = transition.get(TransitionKey.OBSERVATION)
|
||||
if not isinstance(observation, dict):
|
||||
raise ValueError(f"Observation should be a RobotObservation (dict) type got {type(observation)}")
|
||||
return observation
|
||||
|
||||
|
||||
def policy_action_to_transition(action: PolicyAction) -> EnvTransition:
|
||||
"""
|
||||
Convert a `PolicyAction` to an `EnvTransition`.
|
||||
"""
|
||||
if not isinstance(action, PolicyAction):
|
||||
raise ValueError(f"Action should be a PolicyAction type got {type(action)}")
|
||||
return create_transition(action=action)
|
||||
|
||||
|
||||
def batch_to_transition(batch: dict[str, Any]) -> EnvTransition:
|
||||
"""
|
||||
Convert a batch dictionary from a dataset/dataloader into an `EnvTransition`.
|
||||
|
||||
This function maps recognized keys from a batch to the `EnvTransition` structure,
|
||||
filling in missing keys with sensible defaults.
|
||||
|
||||
Args:
|
||||
batch: A batch dictionary.
|
||||
|
||||
Returns:
|
||||
An `EnvTransition` dictionary.
|
||||
|
||||
Raises:
|
||||
ValueError: If the input is not a dictionary.
|
||||
"""
|
||||
|
||||
# Validate input type.
|
||||
if not isinstance(batch, dict):
|
||||
raise ValueError(f"EnvTransition must be a dictionary. Got {type(batch).__name__}")
|
||||
|
||||
action = batch.get("action")
|
||||
if action is not None and not isinstance(action, PolicyAction):
|
||||
raise ValueError(f"Action should be a PolicyAction type got {type(action)}")
|
||||
|
||||
# Extract observation and complementary data keys.
|
||||
observation_keys = {k: v for k, v in batch.items() if k.startswith("observation.")}
|
||||
complementary_data = _extract_complementary_data(batch)
|
||||
|
||||
return create_transition(
|
||||
observation=observation_keys if observation_keys else None,
|
||||
action=batch.get("action"),
|
||||
reward=batch.get("next.reward", 0.0),
|
||||
done=batch.get("next.done", False),
|
||||
truncated=batch.get("next.truncated", False),
|
||||
info=batch.get("info", {}),
|
||||
complementary_data=complementary_data if complementary_data else None,
|
||||
)
|
||||
|
||||
|
||||
def transition_to_batch(transition: EnvTransition) -> dict[str, Any]:
|
||||
"""
|
||||
Convert an `EnvTransition` back to the canonical batch format used in LeRobot.
|
||||
|
||||
This is the inverse of `batch_to_transition`.
|
||||
|
||||
Args:
|
||||
transition: The `EnvTransition` to convert.
|
||||
|
||||
Returns:
|
||||
A batch dictionary with canonical LeRobot field names.
|
||||
"""
|
||||
if not isinstance(transition, dict):
|
||||
raise ValueError(f"Transition should be a EnvTransition type (dict) got {type(transition)}")
|
||||
|
||||
batch = {
|
||||
"action": transition.get(TransitionKey.ACTION),
|
||||
"next.reward": transition.get(TransitionKey.REWARD, 0.0),
|
||||
"next.done": transition.get(TransitionKey.DONE, False),
|
||||
"next.truncated": transition.get(TransitionKey.TRUNCATED, False),
|
||||
"info": transition.get(TransitionKey.INFO, {}),
|
||||
}
|
||||
|
||||
# Add complementary data.
|
||||
comp_data = transition.get(TransitionKey.COMPLEMENTARY_DATA, {})
|
||||
if comp_data:
|
||||
batch.update(comp_data)
|
||||
|
||||
# Flatten observation dictionary.
|
||||
observation = transition.get(TransitionKey.OBSERVATION)
|
||||
if isinstance(observation, dict):
|
||||
batch.update(observation)
|
||||
|
||||
return batch
|
||||
|
||||
|
||||
def identity_transition(transition: EnvTransition) -> EnvTransition:
|
||||
"""
|
||||
An identity function for transitions, returning the input unchanged.
|
||||
|
||||
Useful as a default or placeholder in processing pipelines.
|
||||
|
||||
Args:
|
||||
tr: An `EnvTransition`.
|
||||
|
||||
Returns:
|
||||
The same `EnvTransition`.
|
||||
"""
|
||||
return transition
|
||||
@@ -0,0 +1,56 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from __future__ import annotations
|
||||
|
||||
from enum import Enum
|
||||
from typing import Any, TypeAlias, TypedDict
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
|
||||
|
||||
class TransitionKey(str, Enum):
|
||||
"""Keys for accessing EnvTransition dictionary components."""
|
||||
|
||||
# TODO(Steven): Use consts
|
||||
OBSERVATION = "observation"
|
||||
ACTION = "action"
|
||||
REWARD = "reward"
|
||||
DONE = "done"
|
||||
TRUNCATED = "truncated"
|
||||
INFO = "info"
|
||||
COMPLEMENTARY_DATA = "complementary_data"
|
||||
|
||||
|
||||
PolicyAction: TypeAlias = torch.Tensor
|
||||
RobotAction: TypeAlias = dict[str, Any]
|
||||
EnvAction: TypeAlias = np.ndarray
|
||||
RobotObservation: TypeAlias = dict[str, Any]
|
||||
|
||||
|
||||
EnvTransition = TypedDict(
|
||||
"EnvTransition",
|
||||
{
|
||||
TransitionKey.OBSERVATION.value: dict[str, Any] | None,
|
||||
TransitionKey.ACTION.value: PolicyAction | RobotAction | EnvAction | None,
|
||||
TransitionKey.REWARD.value: float | torch.Tensor | None,
|
||||
TransitionKey.DONE.value: bool | torch.Tensor | None,
|
||||
TransitionKey.TRUNCATED.value: bool | torch.Tensor | None,
|
||||
TransitionKey.INFO.value: dict[str, Any] | None,
|
||||
TransitionKey.COMPLEMENTARY_DATA.value: dict[str, Any] | None,
|
||||
},
|
||||
)
|
||||
@@ -0,0 +1,145 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from dataclasses import dataclass
|
||||
|
||||
from lerobot.configs.types import FeatureType, PipelineFeatureType, PolicyFeature
|
||||
|
||||
from .core import PolicyAction, RobotAction
|
||||
from .pipeline import ActionProcessorStep, ProcessorStepRegistry, RobotActionProcessorStep
|
||||
|
||||
|
||||
@ProcessorStepRegistry.register("map_tensor_to_delta_action_dict")
|
||||
@dataclass
|
||||
class MapTensorToDeltaActionDictStep(ActionProcessorStep):
|
||||
"""
|
||||
Maps a flat action tensor from a policy to a structured delta action dictionary.
|
||||
|
||||
This step is typically used after a policy outputs a continuous action vector.
|
||||
It decomposes the vector into named components for delta movements of the
|
||||
end-effector (x, y, z) and optionally the gripper.
|
||||
|
||||
Attributes:
|
||||
use_gripper: If True, assumes the 4th element of the tensor is the
|
||||
gripper action.
|
||||
"""
|
||||
|
||||
use_gripper: bool = True
|
||||
|
||||
def action(self, action: PolicyAction) -> RobotAction:
|
||||
if not isinstance(action, PolicyAction):
|
||||
raise ValueError("Only PolicyAction is supported for this processor")
|
||||
|
||||
if action.dim() > 1:
|
||||
action = action.squeeze(0)
|
||||
|
||||
# TODO (maractingi): add rotation
|
||||
delta_action = {
|
||||
"delta_x": action[0].item(),
|
||||
"delta_y": action[1].item(),
|
||||
"delta_z": action[2].item(),
|
||||
}
|
||||
if self.use_gripper:
|
||||
delta_action["gripper"] = action[3].item()
|
||||
return delta_action
|
||||
|
||||
def transform_features(
|
||||
self, features: dict[PipelineFeatureType, dict[str, PolicyFeature]]
|
||||
) -> dict[PipelineFeatureType, dict[str, PolicyFeature]]:
|
||||
for axis in ["x", "y", "z"]:
|
||||
features[PipelineFeatureType.ACTION][f"delta_{axis}"] = PolicyFeature(
|
||||
type=FeatureType.ACTION, shape=(1,)
|
||||
)
|
||||
|
||||
if self.use_gripper:
|
||||
features[PipelineFeatureType.ACTION]["gripper"] = PolicyFeature(
|
||||
type=FeatureType.ACTION, shape=(1,)
|
||||
)
|
||||
return features
|
||||
|
||||
|
||||
@ProcessorStepRegistry.register("map_delta_action_to_robot_action")
|
||||
@dataclass
|
||||
class MapDeltaActionToRobotActionStep(RobotActionProcessorStep):
|
||||
"""
|
||||
Maps delta actions from teleoperators to robot target actions for inverse kinematics.
|
||||
|
||||
This step converts a dictionary of delta movements (e.g., from a gamepad)
|
||||
into a target action format that includes an "enabled" flag and target
|
||||
end-effector positions. It also handles scaling and noise filtering.
|
||||
|
||||
Attributes:
|
||||
position_scale: A factor to scale the delta position inputs.
|
||||
rotation_scale: A factor to scale the delta rotation inputs (currently unused).
|
||||
noise_threshold: The magnitude below which delta inputs are considered noise
|
||||
and do not trigger an "enabled" state.
|
||||
"""
|
||||
|
||||
# Scale factors for delta movements
|
||||
position_scale: float = 1.0
|
||||
rotation_scale: float = 0.0 # No rotation deltas for gamepad/keyboard
|
||||
noise_threshold: float = 1e-3 # 1 mm threshold to filter out noise
|
||||
|
||||
def action(self, action: RobotAction) -> RobotAction:
|
||||
# NOTE (maractingi): Action can be a dict from the teleop_devices or a tensor from the policy
|
||||
# TODO (maractingi): changing this target_xyz naming convention from the teleop_devices
|
||||
delta_x = action.pop("delta_x")
|
||||
delta_y = action.pop("delta_y")
|
||||
delta_z = action.pop("delta_z")
|
||||
gripper = action.pop("gripper")
|
||||
|
||||
# Determine if the teleoperator is actively providing input
|
||||
# Consider enabled if any significant movement delta is detected
|
||||
position_magnitude = (delta_x**2 + delta_y**2 + delta_z**2) ** 0.5 # Use Euclidean norm for position
|
||||
enabled = position_magnitude > self.noise_threshold # Small threshold to avoid noise
|
||||
|
||||
# Scale the deltas appropriately
|
||||
scaled_delta_x = delta_x * self.position_scale
|
||||
scaled_delta_y = delta_y * self.position_scale
|
||||
scaled_delta_z = delta_z * self.position_scale
|
||||
|
||||
# For gamepad/keyboard, we don't have rotation input, so set to 0
|
||||
# These could be extended in the future for more sophisticated teleoperators
|
||||
target_wx = 0.0
|
||||
target_wy = 0.0
|
||||
target_wz = 0.0
|
||||
|
||||
# Update action with robot target format
|
||||
action = {
|
||||
"enabled": enabled,
|
||||
"target_x": scaled_delta_x,
|
||||
"target_y": scaled_delta_y,
|
||||
"target_z": scaled_delta_z,
|
||||
"target_wx": target_wx,
|
||||
"target_wy": target_wy,
|
||||
"target_wz": target_wz,
|
||||
"gripper_vel": float(gripper),
|
||||
}
|
||||
|
||||
return action
|
||||
|
||||
def transform_features(
|
||||
self, features: dict[PipelineFeatureType, dict[str, PolicyFeature]]
|
||||
) -> dict[PipelineFeatureType, dict[str, PolicyFeature]]:
|
||||
for axis in ["x", "y", "z", "gripper"]:
|
||||
features[PipelineFeatureType.ACTION].pop(f"delta_{axis}", None)
|
||||
|
||||
for feat in ["enabled", "target_x", "target_y", "target_z", "target_wx", "target_wy", "target_wz"]:
|
||||
features[PipelineFeatureType.ACTION][f"{feat}"] = PolicyFeature(
|
||||
type=FeatureType.ACTION, shape=(1,)
|
||||
)
|
||||
|
||||
return features
|
||||
@@ -13,70 +13,182 @@
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
"""
|
||||
This script defines a processor step for moving environment transition data to a specific torch device and casting
|
||||
its floating-point precision.
|
||||
"""
|
||||
|
||||
from dataclasses import dataclass
|
||||
from typing import Any
|
||||
|
||||
import torch
|
||||
|
||||
from lerobot.configs.types import PolicyFeature
|
||||
from lerobot.processor.pipeline import EnvTransition, TransitionKey
|
||||
from lerobot.configs.types import PipelineFeatureType, PolicyFeature
|
||||
from lerobot.utils.utils import get_safe_torch_device
|
||||
|
||||
from .core import EnvTransition, PolicyAction, TransitionKey
|
||||
from .pipeline import ProcessorStep, ProcessorStepRegistry
|
||||
|
||||
|
||||
@ProcessorStepRegistry.register("device_processor")
|
||||
@dataclass
|
||||
class DeviceProcessor:
|
||||
"""Processes transitions by moving tensors to the specified device.
|
||||
class DeviceProcessorStep(ProcessorStep):
|
||||
"""
|
||||
Processor step to move all tensors within an `EnvTransition` to a specified device and optionally cast their
|
||||
floating-point data type.
|
||||
|
||||
This processor ensures that all tensors in the transition are moved to the
|
||||
specified device (CPU or GPU) before they are returned.
|
||||
This is crucial for preparing data for model training or inference on hardware like GPUs.
|
||||
|
||||
Attributes:
|
||||
device: The target device for tensors (e.g., "cpu", "cuda", "cuda:0").
|
||||
float_dtype: The target floating-point dtype as a string (e.g., "float32", "float16", "bfloat16").
|
||||
If None, the dtype is not changed.
|
||||
"""
|
||||
|
||||
device: torch.device = "cpu"
|
||||
device: str = "cpu"
|
||||
float_dtype: str | None = None
|
||||
|
||||
DTYPE_MAPPING = {
|
||||
"float16": torch.float16,
|
||||
"float32": torch.float32,
|
||||
"float64": torch.float64,
|
||||
"bfloat16": torch.bfloat16,
|
||||
"half": torch.float16,
|
||||
"float": torch.float32,
|
||||
"double": torch.float64,
|
||||
}
|
||||
|
||||
def __post_init__(self):
|
||||
self.device = get_safe_torch_device(self.device)
|
||||
"""
|
||||
Initializes the processor by converting string configurations to torch objects.
|
||||
|
||||
This method sets up the `torch.device`, determines if transfers can be non-blocking, and validates the
|
||||
`float_dtype` string, converting it to a `torch.dtype` object.
|
||||
"""
|
||||
self.tensor_device: torch.device = get_safe_torch_device(self.device)
|
||||
# Update device string in case a specific GPU was selected (e.g., "cuda" -> "cuda:0")
|
||||
self.device = self.tensor_device.type
|
||||
self.non_blocking = "cuda" in str(self.device)
|
||||
|
||||
# Validate and convert float_dtype string to torch dtype
|
||||
if self.float_dtype is not None:
|
||||
if self.float_dtype not in self.DTYPE_MAPPING:
|
||||
raise ValueError(
|
||||
f"Invalid float_dtype '{self.float_dtype}'. Available options: {list(self.DTYPE_MAPPING.keys())}"
|
||||
)
|
||||
self._target_float_dtype = self.DTYPE_MAPPING[self.float_dtype]
|
||||
else:
|
||||
self._target_float_dtype = None
|
||||
|
||||
def _process_tensor(self, tensor: torch.Tensor) -> torch.Tensor:
|
||||
"""
|
||||
Moves a single tensor to the target device and casts its dtype.
|
||||
|
||||
Handles multi-GPU scenarios by not moving a tensor if it's already on a different CUDA device than
|
||||
the target, which is useful when using frameworks like Accelerate.
|
||||
|
||||
Args:
|
||||
tensor: The input torch.Tensor.
|
||||
|
||||
Returns:
|
||||
The processed tensor on the correct device and with the correct dtype.
|
||||
"""
|
||||
# Determine target device
|
||||
if tensor.is_cuda and self.tensor_device.type == "cuda":
|
||||
# Both tensor and target are on GPU - preserve tensor's GPU placement.
|
||||
# This handles multi-GPU scenarios where Accelerate has already placed
|
||||
# tensors on the correct GPU for each process.
|
||||
target_device = tensor.device
|
||||
else:
|
||||
# Either tensor is on CPU, or we're configured for CPU.
|
||||
# In both cases, use the configured device.
|
||||
target_device = self.tensor_device
|
||||
|
||||
# MPS workaround: Convert float64 to float32 since MPS doesn't support float64
|
||||
if target_device.type == "mps" and tensor.dtype == torch.float64:
|
||||
tensor = tensor.to(dtype=torch.float32)
|
||||
|
||||
# Only move if necessary
|
||||
if tensor.device != target_device:
|
||||
tensor = tensor.to(target_device, non_blocking=self.non_blocking)
|
||||
|
||||
# Convert float dtype if specified and tensor is floating point
|
||||
if self._target_float_dtype is not None and tensor.is_floating_point():
|
||||
tensor = tensor.to(dtype=self._target_float_dtype)
|
||||
|
||||
return tensor
|
||||
|
||||
def __call__(self, transition: EnvTransition) -> EnvTransition:
|
||||
# Create a copy of the transition
|
||||
"""
|
||||
Applies device and dtype conversion to all tensors in an environment transition.
|
||||
|
||||
It iterates through the transition, finds all `torch.Tensor` objects (including those nested in
|
||||
dictionaries like `observation`), and processes them.
|
||||
|
||||
Args:
|
||||
transition: The input `EnvTransition` object.
|
||||
|
||||
Returns:
|
||||
A new `EnvTransition` object with all tensors moved to the target device and dtype.
|
||||
"""
|
||||
new_transition = transition.copy()
|
||||
action = new_transition.get(TransitionKey.ACTION)
|
||||
|
||||
# Process observation tensors
|
||||
observation = transition.get(TransitionKey.OBSERVATION)
|
||||
if observation is not None:
|
||||
new_observation = {
|
||||
k: v.to(self.device, non_blocking=self.non_blocking) if isinstance(v, torch.Tensor) else v
|
||||
for k, v in observation.items()
|
||||
}
|
||||
new_transition[TransitionKey.OBSERVATION] = new_observation
|
||||
if action is not None and not isinstance(action, PolicyAction):
|
||||
raise ValueError(f"If action is not None should be a PolicyAction type got {type(action)}")
|
||||
|
||||
# Process action tensor
|
||||
action = transition.get(TransitionKey.ACTION)
|
||||
if action is not None and isinstance(action, torch.Tensor):
|
||||
new_transition[TransitionKey.ACTION] = action.to(self.device, non_blocking=self.non_blocking)
|
||||
simple_tensor_keys = [
|
||||
TransitionKey.ACTION,
|
||||
TransitionKey.REWARD,
|
||||
TransitionKey.DONE,
|
||||
TransitionKey.TRUNCATED,
|
||||
]
|
||||
|
||||
# Process reward tensor
|
||||
reward = transition.get(TransitionKey.REWARD)
|
||||
if reward is not None and isinstance(reward, torch.Tensor):
|
||||
new_transition[TransitionKey.REWARD] = reward.to(self.device, non_blocking=self.non_blocking)
|
||||
dict_tensor_keys = [
|
||||
TransitionKey.OBSERVATION,
|
||||
TransitionKey.COMPLEMENTARY_DATA,
|
||||
]
|
||||
|
||||
# Process done tensor
|
||||
done = transition.get(TransitionKey.DONE)
|
||||
if done is not None and isinstance(done, torch.Tensor):
|
||||
new_transition[TransitionKey.DONE] = done.to(self.device, non_blocking=self.non_blocking)
|
||||
# Process simple, top-level tensors
|
||||
for key in simple_tensor_keys:
|
||||
value = transition.get(key)
|
||||
if isinstance(value, torch.Tensor):
|
||||
new_transition[key] = self._process_tensor(value)
|
||||
|
||||
# Process truncated tensor
|
||||
truncated = transition.get(TransitionKey.TRUNCATED)
|
||||
if truncated is not None and isinstance(truncated, torch.Tensor):
|
||||
new_transition[TransitionKey.TRUNCATED] = truncated.to(
|
||||
self.device, non_blocking=self.non_blocking
|
||||
)
|
||||
# Process tensors nested within dictionaries
|
||||
for key in dict_tensor_keys:
|
||||
data_dict = transition.get(key)
|
||||
if data_dict is not None:
|
||||
new_data_dict = {
|
||||
k: self._process_tensor(v) if isinstance(v, torch.Tensor) else v
|
||||
for k, v in data_dict.items()
|
||||
}
|
||||
new_transition[key] = new_data_dict
|
||||
|
||||
return new_transition
|
||||
|
||||
def get_config(self) -> dict[str, Any]:
|
||||
"""Return configuration for serialization."""
|
||||
return {"device": self.device}
|
||||
"""
|
||||
Returns the serializable configuration of the processor.
|
||||
|
||||
def feature_contract(self, features: dict[str, PolicyFeature]) -> dict[str, PolicyFeature]:
|
||||
Returns:
|
||||
A dictionary containing the device and float_dtype settings.
|
||||
"""
|
||||
return {"device": self.device, "float_dtype": self.float_dtype}
|
||||
|
||||
def transform_features(
|
||||
self, features: dict[PipelineFeatureType, dict[str, PolicyFeature]]
|
||||
) -> dict[PipelineFeatureType, dict[str, PolicyFeature]]:
|
||||
"""
|
||||
Returns the input features unchanged.
|
||||
|
||||
Device and dtype transformations do not alter the fundamental definition of the features (e.g., shape).
|
||||
|
||||
Args:
|
||||
features: A dictionary of policy features.
|
||||
|
||||
Returns:
|
||||
The original dictionary of policy features.
|
||||
"""
|
||||
return features
|
||||
|
||||
@@ -0,0 +1,62 @@
|
||||
#!/usr/bin/env python
|
||||
|
||||
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
from .converters import (
|
||||
observation_to_transition,
|
||||
robot_action_observation_to_transition,
|
||||
transition_to_observation,
|
||||
transition_to_robot_action,
|
||||
)
|
||||
from .core import RobotAction, RobotObservation
|
||||
from .pipeline import IdentityProcessorStep, RobotProcessorPipeline
|
||||
|
||||
|
||||
def make_default_teleop_action_processor() -> RobotProcessorPipeline[
|
||||
tuple[RobotAction, RobotObservation], RobotAction
|
||||
]:
|
||||
teleop_action_processor = RobotProcessorPipeline[tuple[RobotAction, RobotObservation], RobotAction](
|
||||
steps=[IdentityProcessorStep()],
|
||||
to_transition=robot_action_observation_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
return teleop_action_processor
|
||||
|
||||
|
||||
def make_default_robot_action_processor() -> RobotProcessorPipeline[
|
||||
tuple[RobotAction, RobotObservation], RobotAction
|
||||
]:
|
||||
robot_action_processor = RobotProcessorPipeline[tuple[RobotAction, RobotObservation], RobotAction](
|
||||
steps=[IdentityProcessorStep()],
|
||||
to_transition=robot_action_observation_to_transition,
|
||||
to_output=transition_to_robot_action,
|
||||
)
|
||||
return robot_action_processor
|
||||
|
||||
|
||||
def make_default_robot_observation_processor() -> RobotProcessorPipeline[RobotObservation, RobotObservation]:
|
||||
robot_observation_processor = RobotProcessorPipeline[RobotObservation, RobotObservation](
|
||||
steps=[IdentityProcessorStep()],
|
||||
to_transition=observation_to_transition,
|
||||
to_output=transition_to_observation,
|
||||
)
|
||||
return robot_observation_processor
|
||||
|
||||
|
||||
def make_default_processors():
|
||||
teleop_action_processor = make_default_teleop_action_processor()
|
||||
robot_action_processor = make_default_robot_action_processor()
|
||||
robot_observation_processor = make_default_robot_observation_processor()
|
||||
return (teleop_action_processor, robot_action_processor, robot_observation_processor)
|
||||
Some files were not shown because too many files have changed in this diff Show More
Reference in New Issue
Block a user